





 该博客探讨了汽车制动系统的单轮制动模型和滑移率控制策略。通过Simulink进行了PID控制和非线性Bang-Bang控制的仿真,分析了车速、轮速与制动距离的关系。仿真结果显示了不同控制方式对车辆制动性能的影响。
该博客探讨了汽车制动系统的单轮制动模型和滑移率控制策略。通过Simulink进行了PID控制和非线性Bang-Bang控制的仿真,分析了车速、轮速与制动距离的关系。仿真结果显示了不同控制方式对车辆制动性能的影响。
1.单轮制动模型
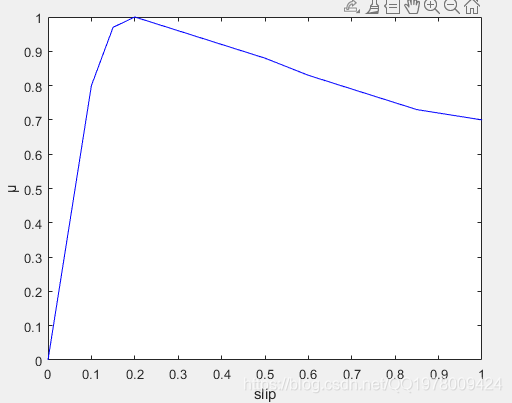
2.滑移率曲线
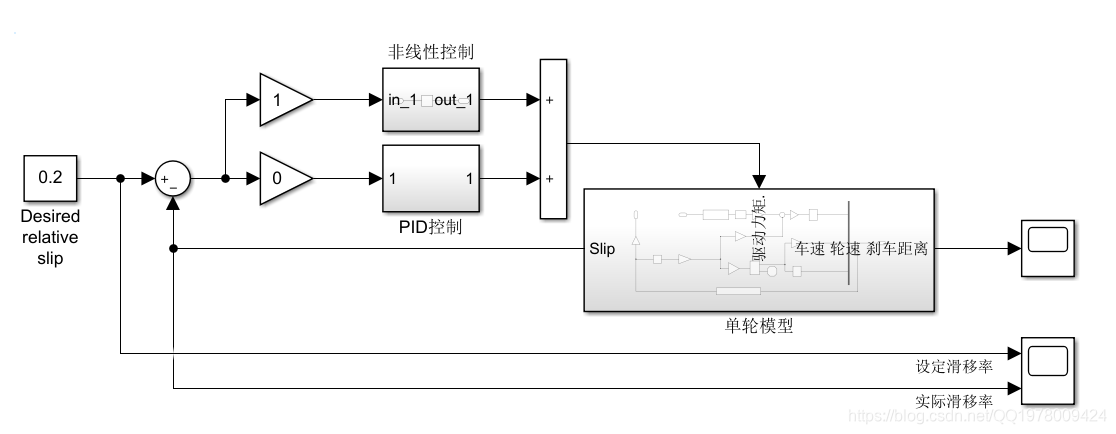
3.Simulink仿真模型
4.仿真结果
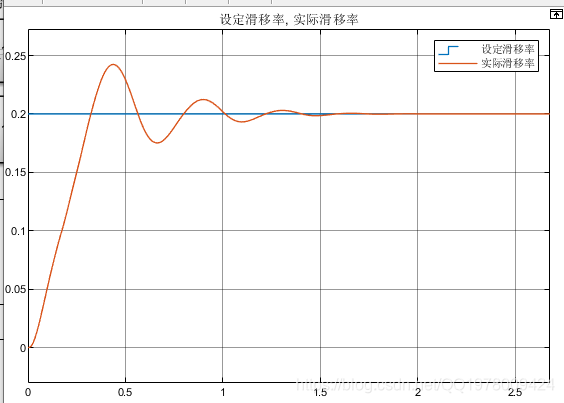
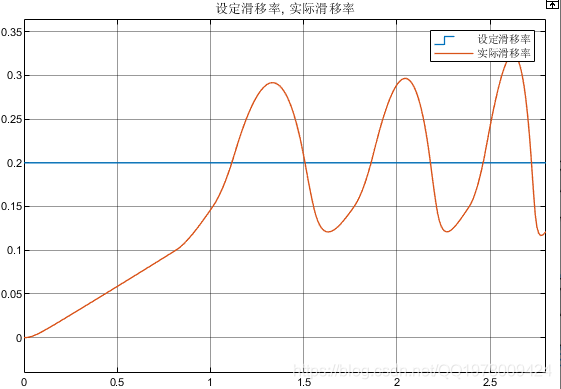
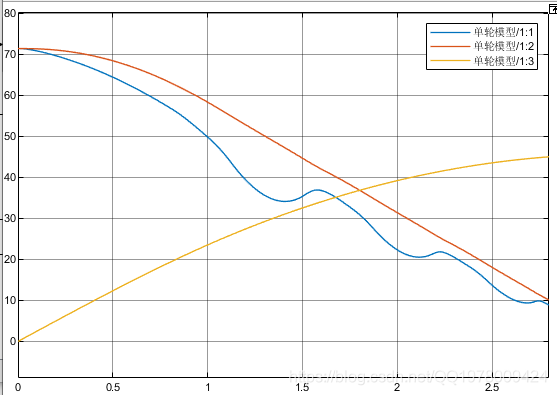
(1)PID控制
滑移率控制
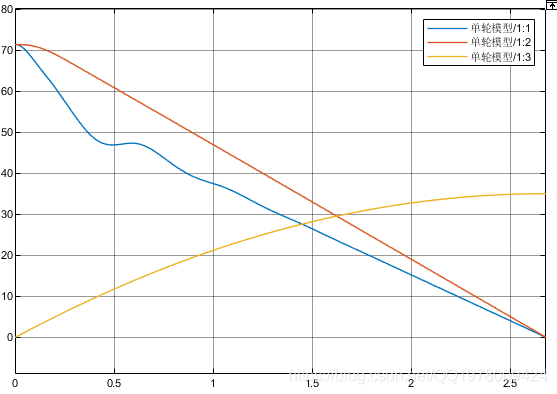
车速-轮速-制动距离
(2)非线性控制Bang-Bang控制
滑移率控制
车速-轮速-制动距离

1.单轮制动模型
2.滑移率曲线
3.Simulink仿真模型
4.仿真结果
(1)PID控制
滑移率控制
车速-轮速-制动距离
(2)非线性控制Bang-Bang控制
滑移率控制
车速-轮速-制动距离

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 48
48





