







基于视觉的深度学习疲劳驾驶行为检测与报警系统
随着智能交通系统的快速发展,疲劳驾驶已成为引发交通事故的主要因素之一。据统计,全球约20%的交通事故与驾驶员疲劳直接相关。传统的疲劳检测方法(如生理信号监测)存在侵入性强、成本高等缺陷,而基于视觉的深度学习技术通过非接触式分析驾驶员行为特征,成为更安全、高效的解决方案。本文将从技术原理、系统架构、实现难点及实际应用等方面,系统介绍基于深度学习的视觉疲劳检测与报警系统。
一、技术原理与核心算法
疲劳驾驶的视觉特征主要表现为眼部状态(闭眼时长)、头部姿态(低头/后仰)、面部表情(打哈欠频率)以及方向盘握持稳定性等。基于深度学习的检测系统通过以下关键技术实现精准识别:
1. 多目标检测与跟踪
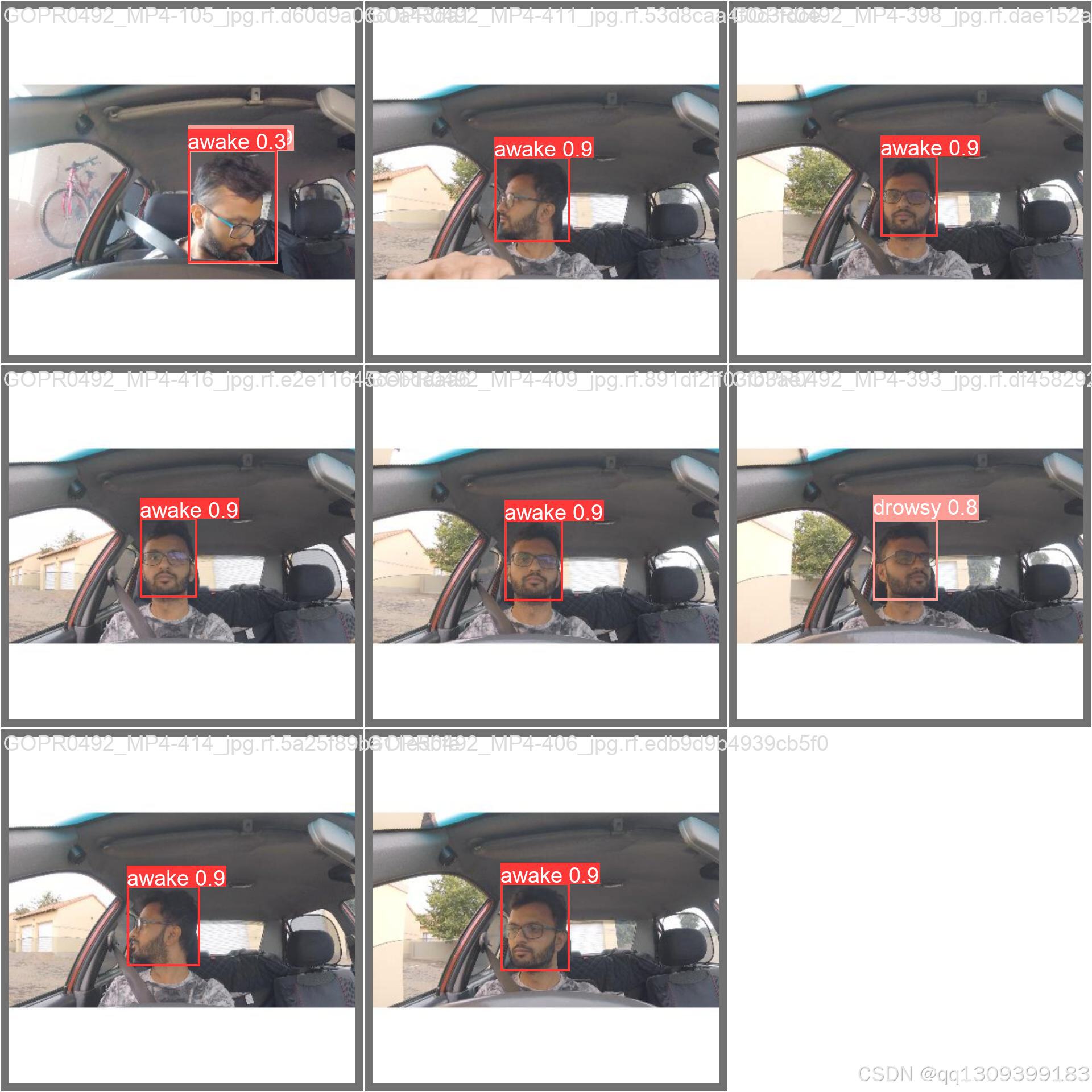
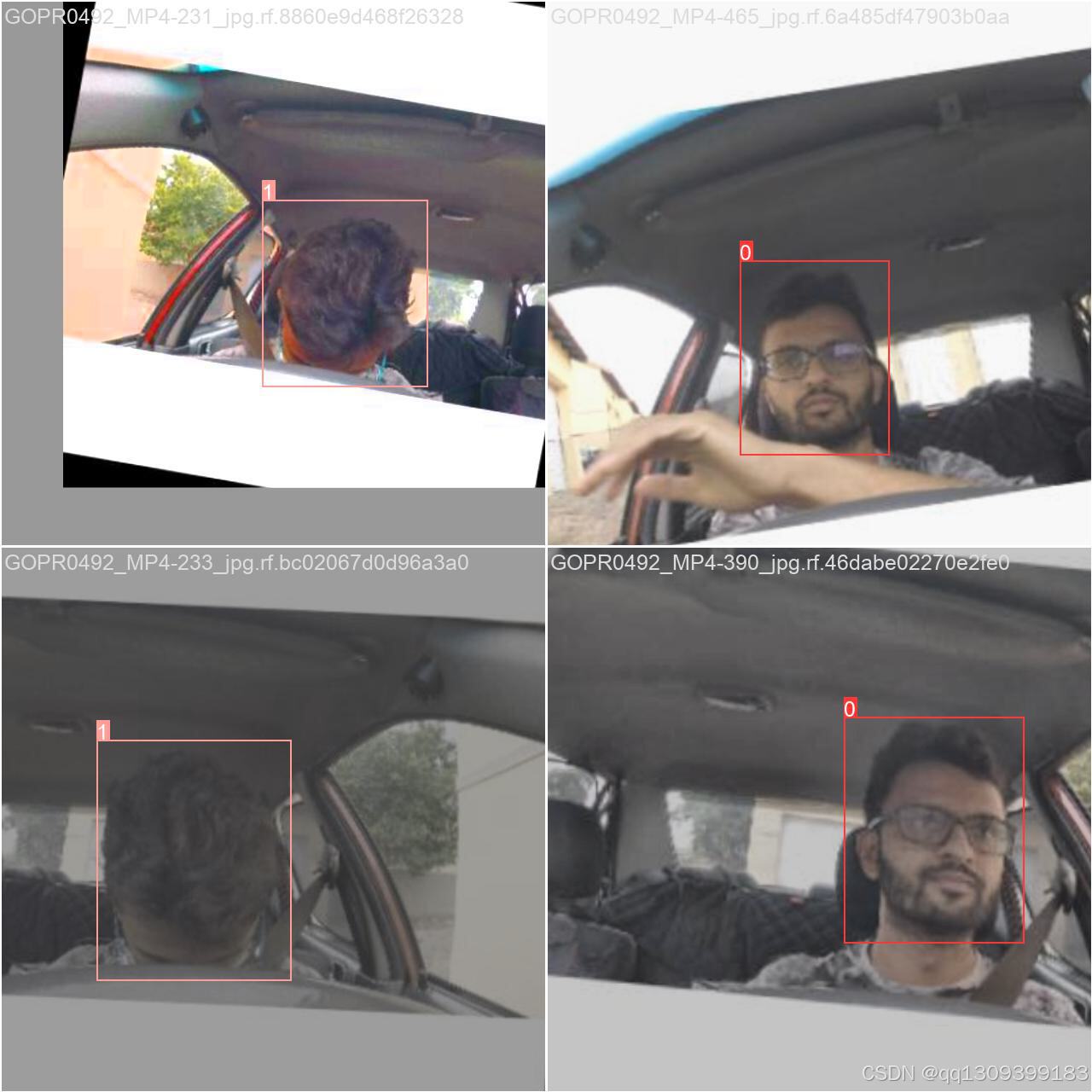
- 人脸定位:采用YOLOv8或RetinaFace模型实时检测驾驶员面部区域,确保在头部转动、遮挡等情况下仍能准确定位;
- 关键点检测:使用MediaPipe或Dlib提取68个人脸关键点,重点捕捉眼部、嘴部轮廓(如图1);
- 时序跟踪:通过DeepSORT算法跨帧跟踪面部特征,解决快速运动导致的检测中断问题。
2. 疲劳特征提取
- 眼部状态分析:计算EAR值(Eye Aspect Ratio),当连续3帧EAR<0.2时判定为闭眼;
- 头部姿态估计:基于PnP算法解算欧拉角,检测低头超过25°或持续后仰的异常姿态;
- 哈欠检测:结合嘴部MAR值(Mouth Aspect Ratio)与持续时间,阈值通常设为MAR>0.5且持续2秒以上。
3. 多模态决策融合
采用加权投票机制综合多维度特征:
疲劳指数 = 0.4×PERCLOS(闭眼时间占比) + 0.3×头部偏移度 + 0.2×哈欠频率 + 0.1×方向盘抖动方差
当指数超过阈值(如0.7)时触发报警。
二、系统架构与实现流程
1. 硬件部署方案
- 摄像头选型:近红外摄像头(850nm波长)解决夜间光照不足问题,帧率≥30fps;
- 边缘计算设备:NVIDIA Jetson AGX Xavier或华为Atlas 200 DK,支持本地化实时推理;
- 报警终端:车载扬声器、仪表盘警示灯及4G模块(远程通知平台)。
2. 软件实现流程
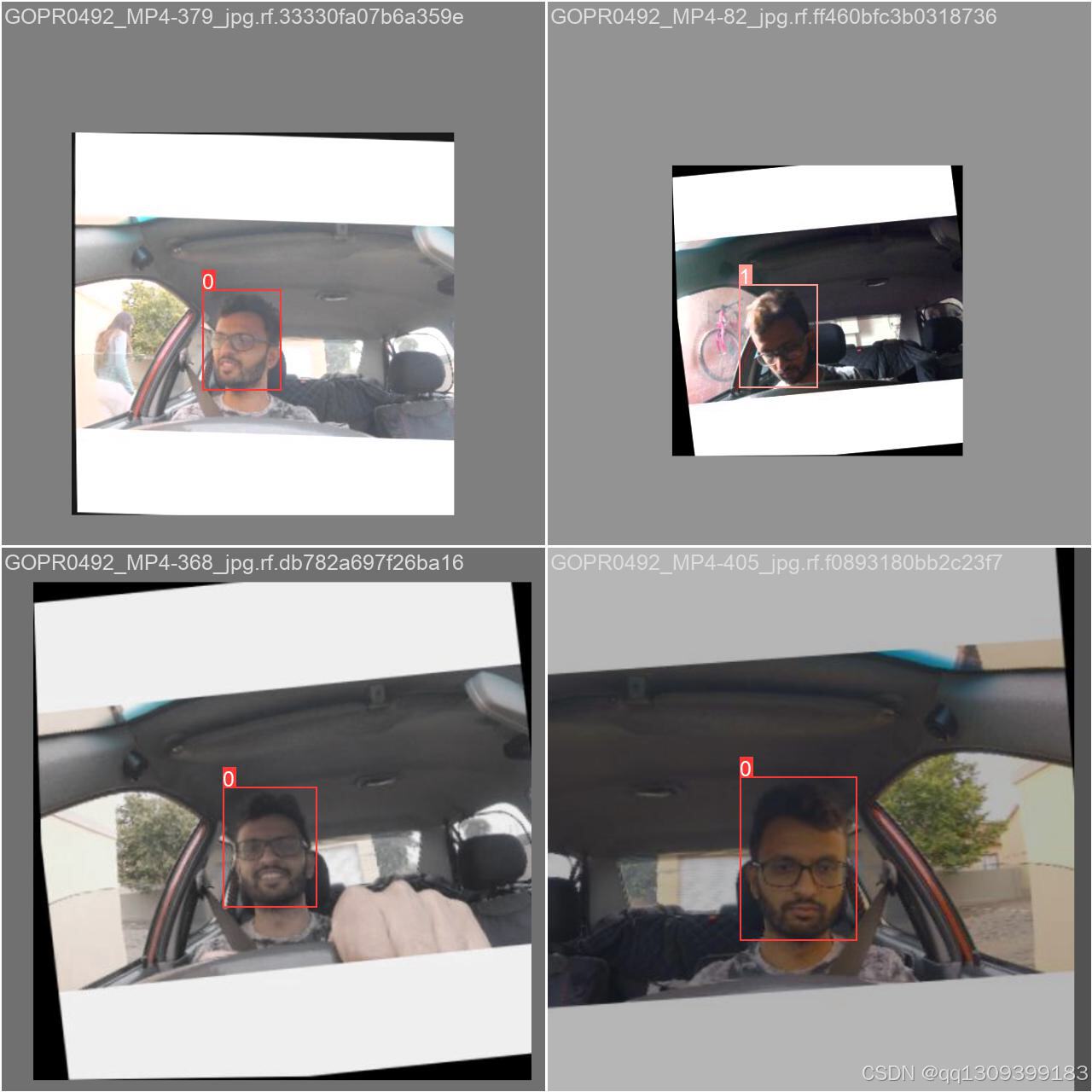
- 数据预处理:
- 图像归一化(640×480分辨率)与直方图均衡化增强对比度;
- 动态ROI裁剪减少背景干扰。
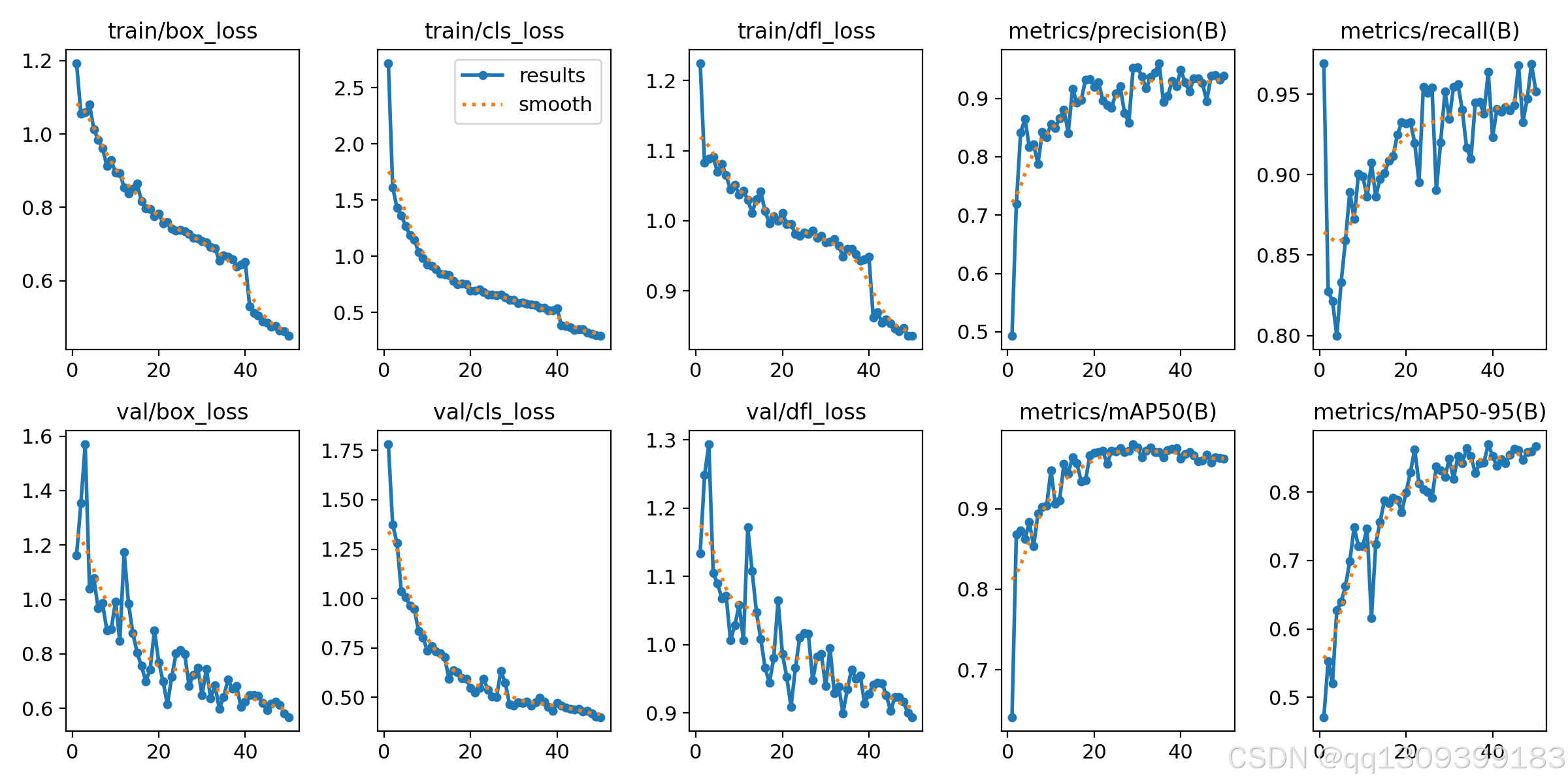
- 模型训练:
- 使用公开数据集(NTHU-DDD、YawDD)与自采集数据联合训练;
- 采用迁移学习(基于VGGFace预训练权重)加速收敛;
- 引入Focal Loss缓解闭眼/睁眼样本不平衡问题。
- 实时推理优化:
- 模型轻量化:通过通道剪枝将ResNet-50参数量减少60%;
- TensorRT加速:FP16量化使推理速度提升2.3倍。
3. 报警策略设计
- 分级预警机制:
- 初级预警(疲劳指数0.5-0.7):仪表盘图标闪烁;
- 中级预警(0.7-0.9):蜂鸣器间歇鸣响;
- 紧急报警(>0.9):联动车载系统强制降速,并发送GPS位置至监控中心。
- 误报过滤:加入15秒延迟确认期,避免瞬时动作(如打喷嚏)触发误报。
三、技术挑战与解决方案
1. 复杂环境干扰
- 问题:强光眩光、夜间低光照、眼镜反光等影响特征提取。
- 解决方案:
- 多光谱融合:可见光与红外图像特征级融合;
- 对抗生成网络(GAN):合成极端光照条件下的训练数据。
2. 个性化差异
- 问题:不同人种的眼睑厚度、面部结构差异导致阈值失效。
- 解决方案:
- 自适应阈值校准:系统启动时进行5分钟基准状态学习;
- 个性化模型微调:利用联邦学习在不泄露隐私的前提下更新模型。
3. 实时性要求
- 问题:边缘设备算力有限,需平衡精度与速度。
- 解决方案:
- 模型蒸馏:用大型教师网络(如EfficientNet-B4)指导轻量学生网络训练;
- 异步流水线:将人脸检测(10ms)、关键点计算(15ms)、决策(5ms)并行处理。
四、应用场景与局限性
1. 典型应用场景
- 商用车队管理:物流、公交车辆实时监控驾驶员状态,降低保险赔付率;
- 乘用车安全系统:集成至ADAS(高级驾驶辅助系统),与AEB(自动紧急制动)联动;
- 驾校培训:量化评估学员专注度,纠正不良驾驶习惯。
2. 现存局限性
- 隐私争议:持续面部监控可能引发用户抵触;
- 特殊场景漏检:戴墨镜、口罩等场景需依赖多模态传感器补充;
- 长尾问题:极端疲劳状态下特征反而不明显(如睁眼发呆)。
五、未来发展方向
- 多模态感知融合:结合方向盘压力传感器、心率监测手环提升可靠性;
- 因果推理模型:利用图神经网络(GNN)分析疲劳成因(如连续驾驶时长、路况复杂度);
- 边缘-云协同计算:本地轻量化模型实时检测,云端重计算模型定期校准参数;
- 个性化健康管理:根据疲劳数据推荐休息计划,并与导航系统联动规划服务区停靠。
结语
基于视觉的深度学习疲劳驾驶检测系统通过非侵入式分析,在保障驾驶安全的同时兼顾用户体验,已成为智能交通领域的核心技术之一。随着Transformer架构、神经辐射场(NeRF)等技术的引入,未来系统将实现更高精度的三维姿态估计与跨场景泛化能力。然而,技术落地仍需解决伦理规范、硬件成本、跨域适配等挑战,唯有算法创新与工程实践并重,方能推动该技术从实验室走向真实道路场景。


















 68
68

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









