







基于YOLOv8与OpenCV的车道线及车辆检测系统
▌项目概述
本项目融合YOLOv8目标检测与OpenCV计算机视觉技术,实现实时车道线识别、车辆检测及距离估算功能,为道路环境分析提供完整解决方案。
▌核心功能
• 智能车道检测
- 基于边缘检测与霍夫变换的精准识别
- 动态ROI(感兴趣区域)聚焦技术
• 多目标车辆识别
- YOLOv8模型实时检测各类车辆
- 带置信度的边界框标注(阈值≥0.5)
• 距离测算系统
- 基于边界框尺寸的动态测距算法
- 可调节的焦距参数(默认1000像素)
▌快速部署
pip install opencv-python-headless numpy ultralytics
python video.py
▌技术实现详解
1. 车道检测流程
① ROI区域掩膜处理
def region_of_interest(img, vertices):
mask = np.zeros_like(img)
cv2.fillPoly(mask, [vertices], 255)
return cv2.bitwise_and(img, mask)
② 双阶段边缘检测
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
canny = cv2.Canny(gray, 100, 200) # 高低阈值优化
③ 霍夫线变换
lines = cv2.HoughLinesP(
cropped_image,
rho=6,
theta=np.pi/60,
threshold=160,
minLineLength=40,
maxLineGap=25
)
2. 车辆检测模块
① YOLOv8模型加载
model = YOLO('weights/yolov8n.pt') # 支持自定义模型
② 动态边界框标注
for box in results[0].boxes:
x1, y1, x2, y2 = map(int, box.xyxy[0])
if model.names[int(box.cls)] == 'car':
cv2.rectangle(frame, (x1,y1), (x2,y2), (0,255,255), 2)
③ 距离估计算法
def estimate_distance(bbox_width):
return (2.0 * 1000) / bbox_width # 已知车辆宽度2米
▌实时处理管线
while cap.isOpened():
ret, frame = cap.read()
lane_img = lane_pipeline(frame)
results = model(frame)
for box in results[0].boxes:
# 综合标注逻辑
cv2.imshow('智能道路分析系统', output_frame)
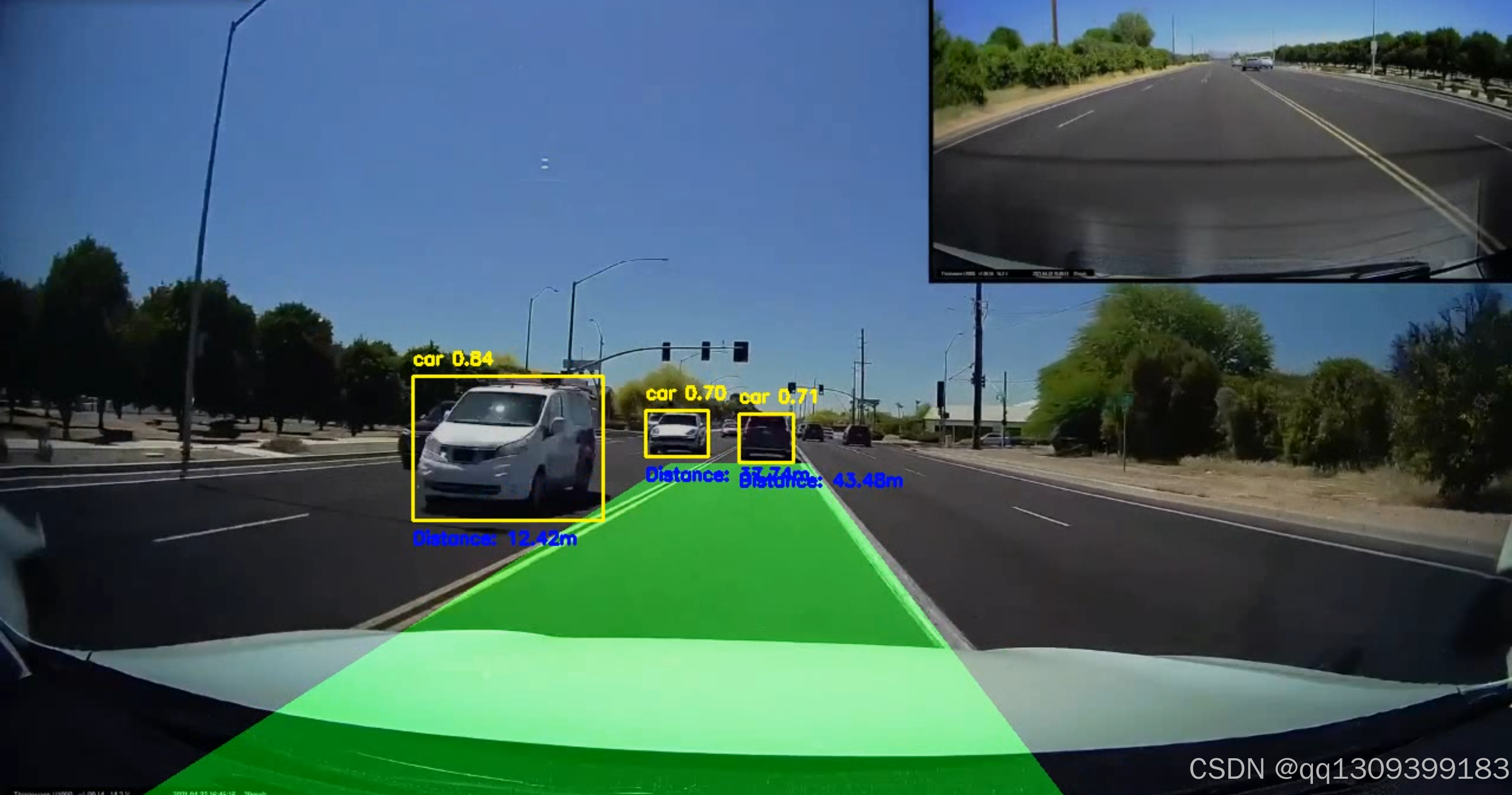
▌效果演示
系统实时输出包含以下要素的画面:
- 彩色标注的车道线
- 带置信度的车辆边界框
- 动态距离显示(米)
▌应用前景
• 自动驾驶感知系统
• 智能交通监控
• 驾驶辅助预警系统
注:实际部署时需根据摄像头参数调整焦距(1000)和已知物体宽度(2.0)参数



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









