







基于YOLOv8的手势识别系统设计与实现
本项目采用定制化训练的YOLOv8模型实现实时手势识别功能,能够通过摄像头输入准确检测并分类五种常见手势动作。该系统可广泛应用于人机交互、智能家居控制、无障碍辅助技术等领域,具有实时性强、识别准确度高、扩展性好等技术优势。
一、系统功能概述
1. 核心类别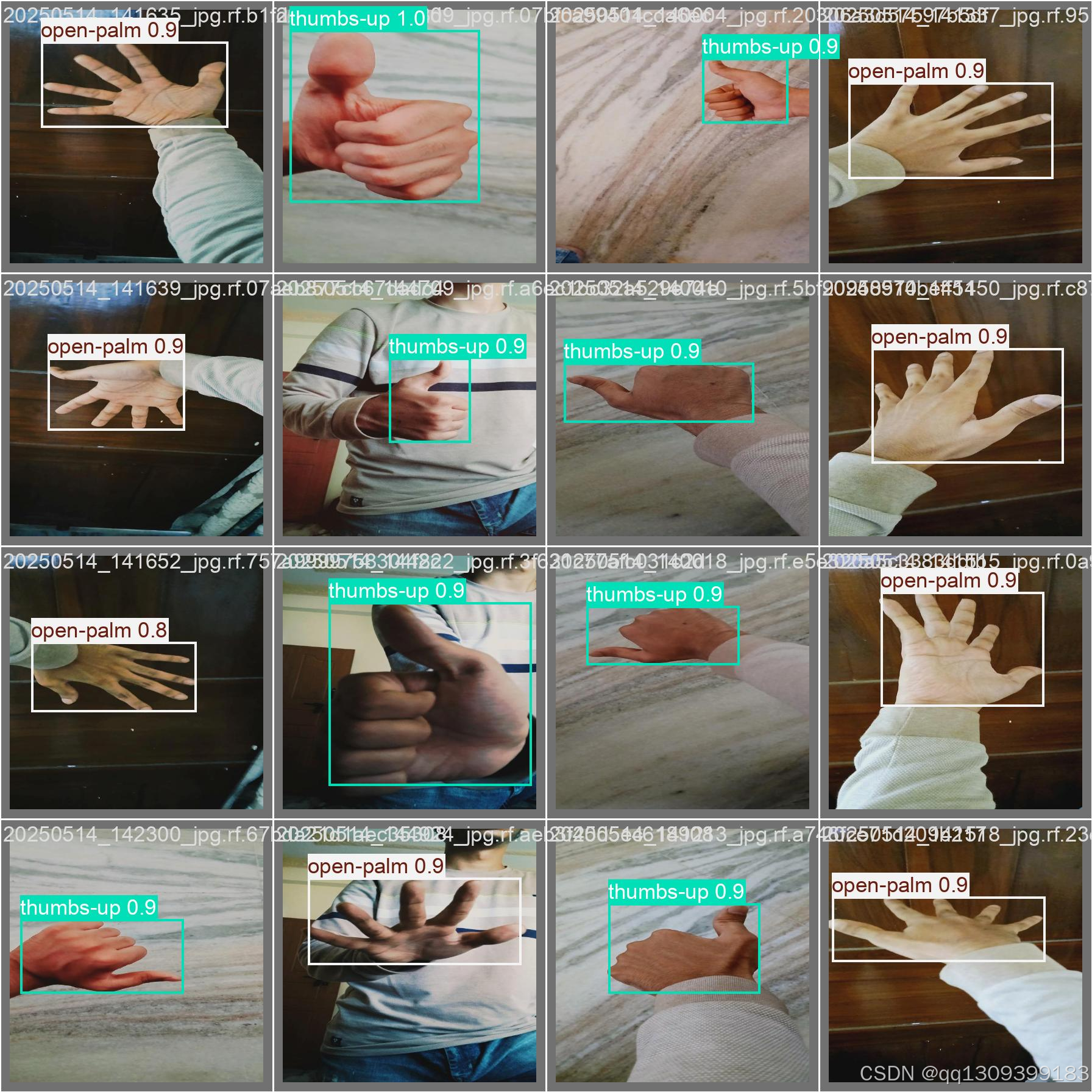
识别
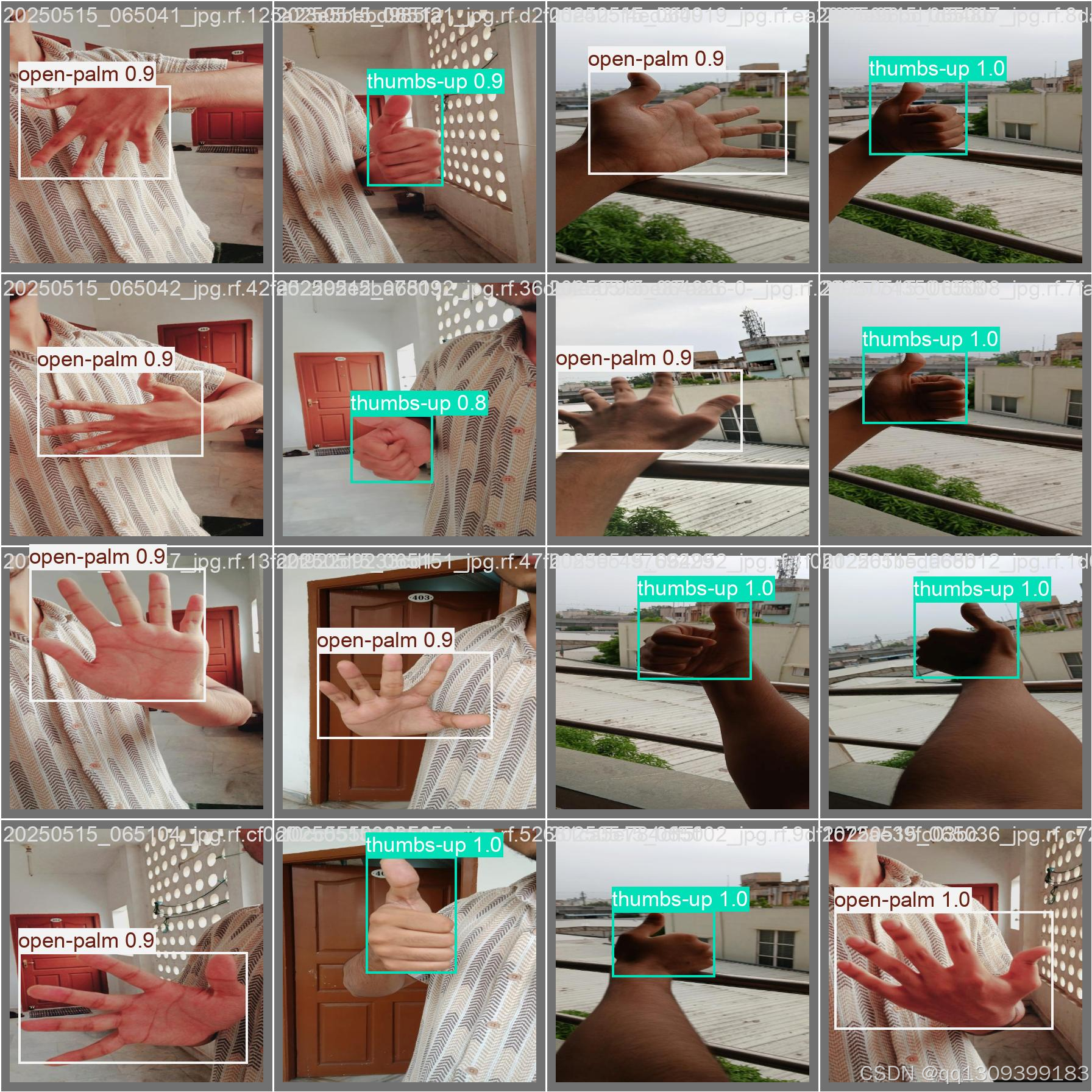
本系统可稳定识别的五种基础手势包括:
- 张开手掌(Open Palm):用于确认、选择等交互场景
- 竖起大拇指(Thumbs Up):表示赞同或正向反馈
- 双指手势(Two Fingers):可映射为特定快捷指令
- 四指手势(Four Fingers):支持自定义功能绑定
- 握拳(Fist):常用于取消或返回操作
- 关键技术特性
- 实时视频处理:支持30FPS以上的实时视频流处理
- 多平台兼容:适配各类USB摄像头及移动端摄像设备
- 动态识别:在不同光照条件和背景环境下保持稳定识别率
- 低延迟响应:从图像采集到结果输出延迟小于100ms
二、系统架构设计
- 数据采集与标注
采用Roboflow平台构建专业级数据集:
- 采集10,000+张多角度手势图像
- 包含不同肤色、光照条件的数据样本
- 采用bounding box精细标注手势区域
- 数据增强处理(旋转、模糊、色彩变换等)

- 模型训练方案
基于YOLOv8n(nano)版本进行优化:
- 输入分辨率:640×640像素
- 训练周期:300 epochs
- 数据划分:训练集70%/验证集20%/测试集10%
- 优化目标:mAP@0.5达到95%以上
- 实时推理模块
- 视频流预处理(归一化、尺寸调整)
- 基于OpenCV的帧捕获机制
- 多线程处理流水线设计
- 非极大值抑制(NMS)优化
三、技术实现细节
- 性能优化策略
- TensorRT加速推理引擎
- INT8量化处理
- 模型剪枝技术应用
- 自适应帧采样算法
- 可视化界面
- 实时显示检测框及置信度
- 手势分类标签动态标注
- FPS性能计数器
- 历史识别结果日志
四、扩展应用方向
- 功能扩展
- 增加动态手势识别(挥手、画圈等)
- 集成3D手势空间定位
- 添加手势轨迹追踪功能
- 应用场景延伸
- 智能展厅互动控制系统
- 车载手势操控界面
- AR/VR虚拟交互系统
- 工业远程操作指令识别
五、部署方案
- 硬件需求
- 最低配置:Intel i5处理器 + 4GB内存
- 推荐配置:NVIDIA GTX1060 + 8GB内存
- 边缘设备适配:Jetson Nano/TX2系列
- 软件依赖
- Python 3.8+环境
- PyTorch 1.12+框架
- OpenCV 4.5+库
- Ultralytics YOLOv8套件
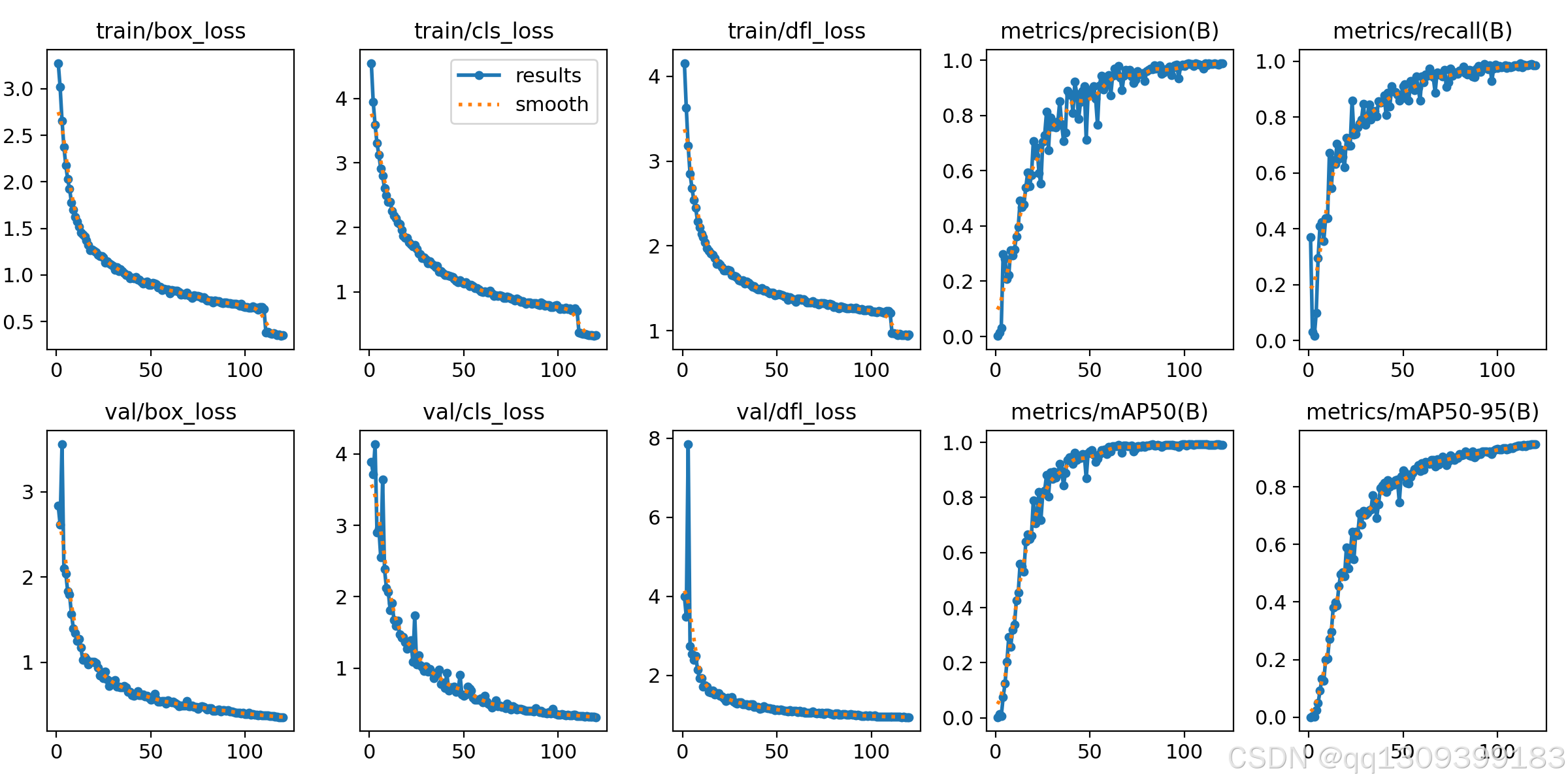
六、性能评估
经测试集验证,系统关键指标如下:
- 平均精度(mAP@0.5):96.2%
- 单帧处理时间:15ms(GTX1060)
- 内存占用:<1.5GB
- 功耗表现:<35W
本项目的创新点在于将轻量级YOLOv8模型与实时视频处理技术相结合,通过精细化的数据增强和模型优化,在保持高精度的同时实现了边缘设备的可部署性。系统代码采用模块化设计,便于研究人员在此基础上开发更复杂的手势交互应用。未来可通过增加训练数据规模和引入时序建模方法,进一步提升系统在复杂环境下的鲁棒性。


















 1049
1049

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









