









以双馈电机为例,坐标变换首先是把三相坐标轴转换成αβ坐标上,主要就是将三相坐标轴分别投影到直角坐标αβ上。具体的公式请自行百度。
同理将αβ坐标变换到dq坐标轴上也是投影,但此时由于dq坐标是旋转坐标所以和直角坐标alpha和beta 有一定相角差,这个相角we称为电角速度。同样公式请自行百度。
下面开始在2022a版本simulink中进行模型搭建:

这是一个整体的模型,其中ABC为正弦波,频率为2*pi*50,振幅100,先是通过三相转换为直角坐标系,然后再转换成旋转坐标系,同时我们采用了一个反变换,将旋转坐标系转换成三相坐标系后输出,取A相波形与原波形对比。
其中三相转换成直角坐标系αβ的模型如下:
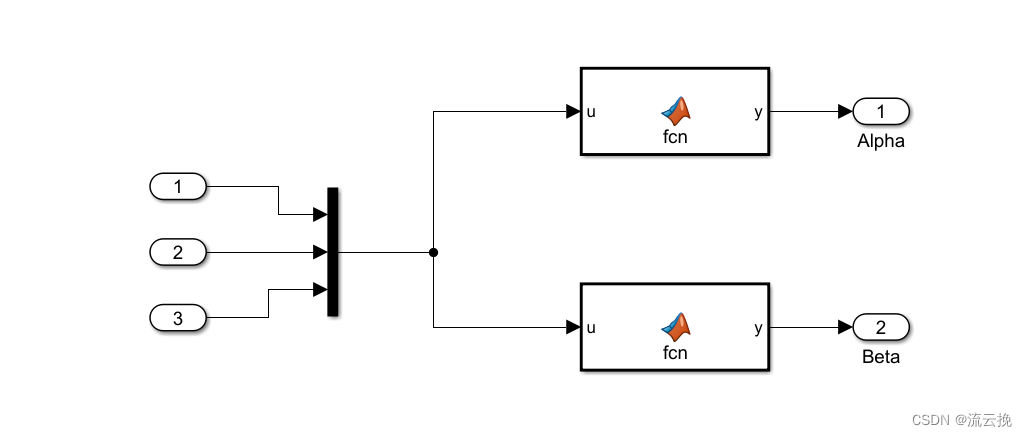


上下两个fcn公式如上所示,其中u1到u3 是三个输入耦合后的三个自变量。
同理,直角坐标系αβ转换到旋转坐标dq也是一样,注意三输入口有一个theta,这对应外部的we电角速度。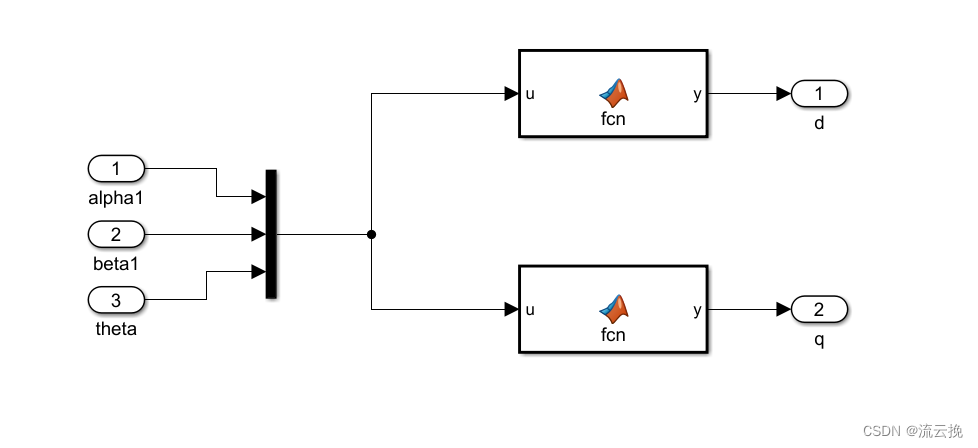
其两个函数编写如下:


同样其反变换也是一样:




最后得到输出图像如下:

可以看出转换之后反变换和 未转换之前波形几乎一致。















 933
933











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











