






基于simulink的12/8开关磁阻电机电流斩波、角度位置调速控制、模型预测电流、转矩控制仿真程序
YID:3950672176271980
TUMI本啦

Simulink下的开关磁阻电机控制策略:电流斩波与模型预测电流的探索
在当今的电机控制领域,基于Simulink的仿真程序为我们的研究提供了强大的工具。今天,我们将聚焦于12/8开关磁阻电机(SRM)的电流斩波和模型预测电流控制策略,探讨其角度位置调速控制和转矩控制的仿真程序。
一、电流斩波控制策略
首先,让我们来看看电流斩波控制策略。在SRM的运行中,电流的合理控制是保证电机高效、稳定运行的关键。Simulink环境为我们提供了精确的模型和仿真工具,可以实时监控和调整电机的电流。
在12/8 SRM中,当电机电流超过设定的阈值时,我们采用电流斩波策略。这意味着一旦电流达到或超过预定值,我们就会通过改变电机的电压或开关状态来减少电流的继续增长。这种控制策略有助于保护电机免受过载和过热的影响,同时也能提高电机的运行效率。
二、模型预测电流控制策略
接下来,我们转向模型预测电流控制策略。这种策略基于电机的数学模型,通过预测未来的电流行为来做出控制决策。在Simulink环境中,我们可以建立这样的模型并进行仿真。
通过模型的精确预测,我们可以提前感知电流的变化趋势,从而在合适的时机进行控制调整。这不仅有助于实现电机的精确控制,还能提高电机的响应速度和稳定性。
三、角度位置调速控制与转矩控制仿真
在Simulink环境下,我们还可以进行角度位置调速控制和转矩控制的仿真。这些控制策略的目的是根据电机的位置和转矩需求来调整电机的运行状态。
通过调整电机的开关状态和电压,我们可以精确地控制电机的角度位置和转矩输出。这种控制策略在许多应用中都非常有用,如需要精确位置控制的机器人和需要稳定转矩输出的机械设备。
四、示例代码与仿真结果
在Simulink中,我们可以使用MATLAB/Octave语言编写仿真程序。以下是一个简单的示例代码片段,展示了如何设置SRM的模型和进行基本的仿真:
% 创建SRM模型
srm_model = build_srm_model('12_8_switch');
% 设置仿真参数
sim_time = 5; % 仿真时间
time_vector = linspace(0, sim_time, 1000); % 时间向量
initial_conditions = ...; % 初始条件(例如电机位置、速度等)
% 设定斩波电流阈值及进行斩波操作(省略具体实现细节)
current_limit = 10; % 设定斩波电流阈值
... % 斩波操作代码(根据实际需求编写)
% 运行仿真并收集数据(省略具体实现细节)
simulation_data = run_simulation(srm_model, time_vector, initial_conditions);
... % 数据处理和分析(根据实际需求编写)
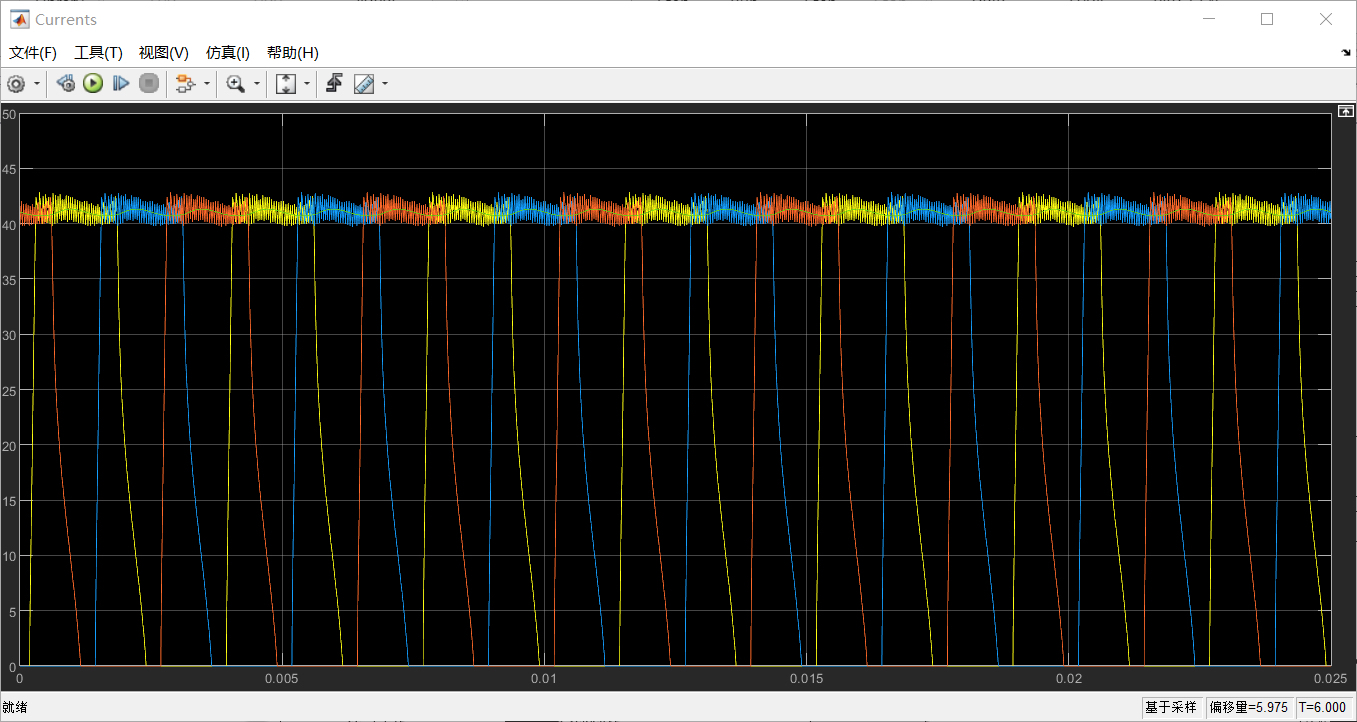
通过上述代码和Simulink的仿真环境,我们可以得到关于SRM的电流、转矩、速度等关键参数的详细数据,为后续的电机控制和优化提供依据。
五、结语
基于Simulink的12/8开关磁阻电机电流斩波、角度位置调速控制和模型预测电流等控制策略为我们的电机控制研究提供了强大的工具。通过精确的建模和仿真,我们可以更好地理解电机的运行机制和控制策略,为实际应用中的电机设计和控制提供有力的支持。
深度好文,点即享: http://lanzous.cn/672176271980.html


















 1007
1007

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









