






 文章讲述了在使用Matlab/Simulink进行永磁同步电机控制时,如何通过已知的反电动势常数和电机参数计算磁链数据的过程,以及验证了转矩常数的正确性。
文章讲述了在使用Matlab/Simulink进行永磁同步电机控制时,如何通过已知的反电动势常数和电机参数计算磁链数据的过程,以及验证了转矩常数的正确性。
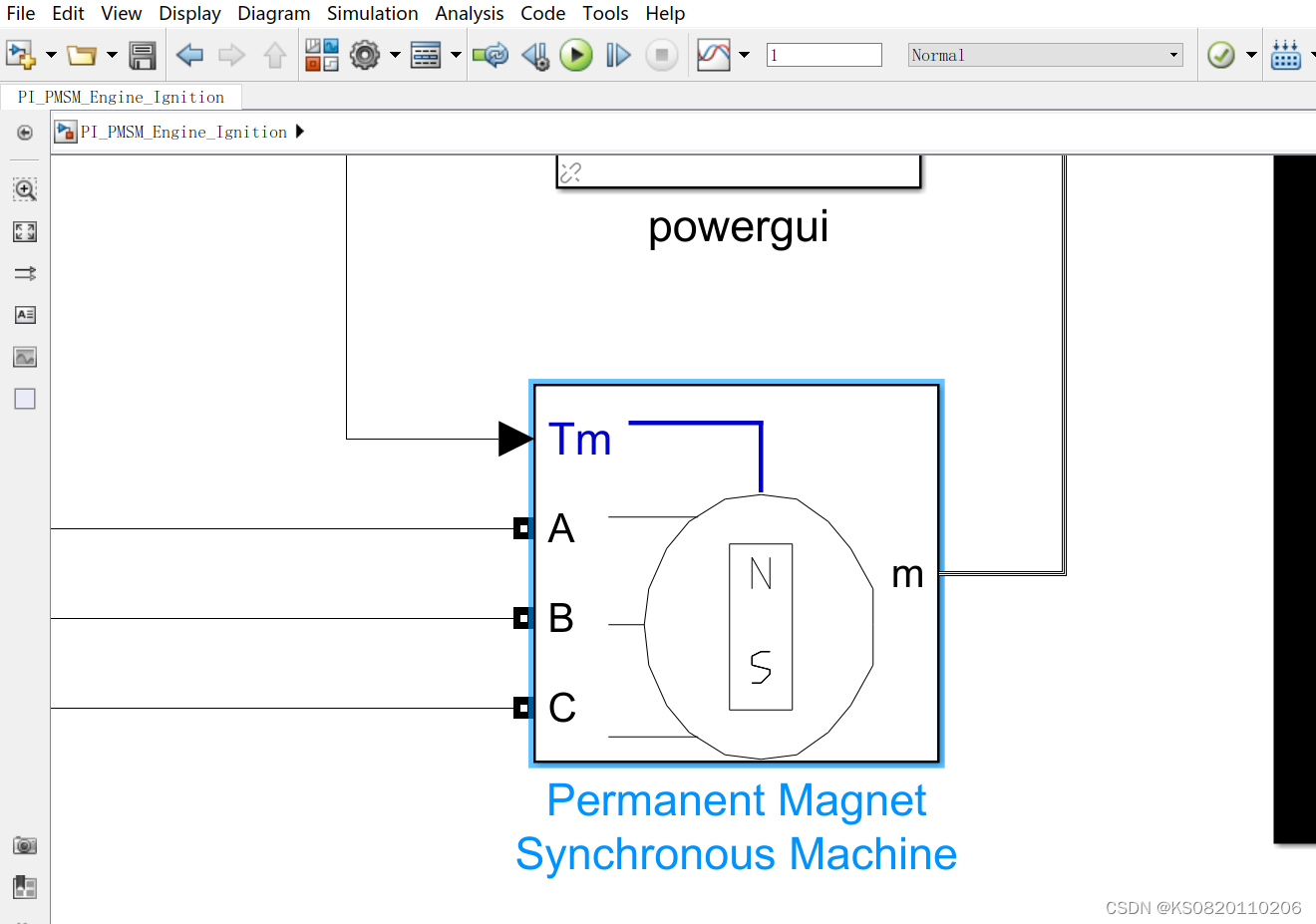
今天做永磁同步电机控制的时候需要用到永磁体磁链数据,但是电机参数只知道反电动势常数,可以通过matlab/simulink来快速换算得出值。
已知我的PMSM反电动势常数为:2V_peak L-L/krpm,即每千转2V线电压幅值。电机极对数为3。求永磁体磁链φ。
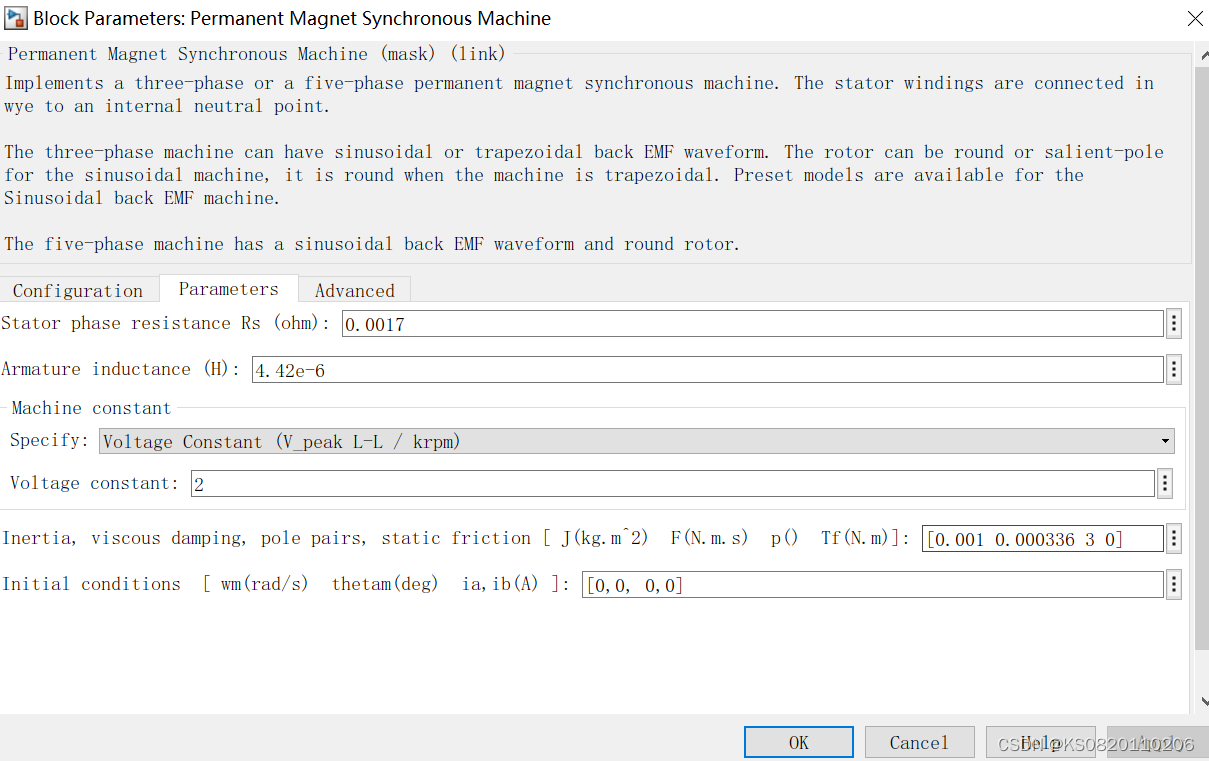
在matlab/simulink中可以快速设置电机极对数以及电机常数进行换算:
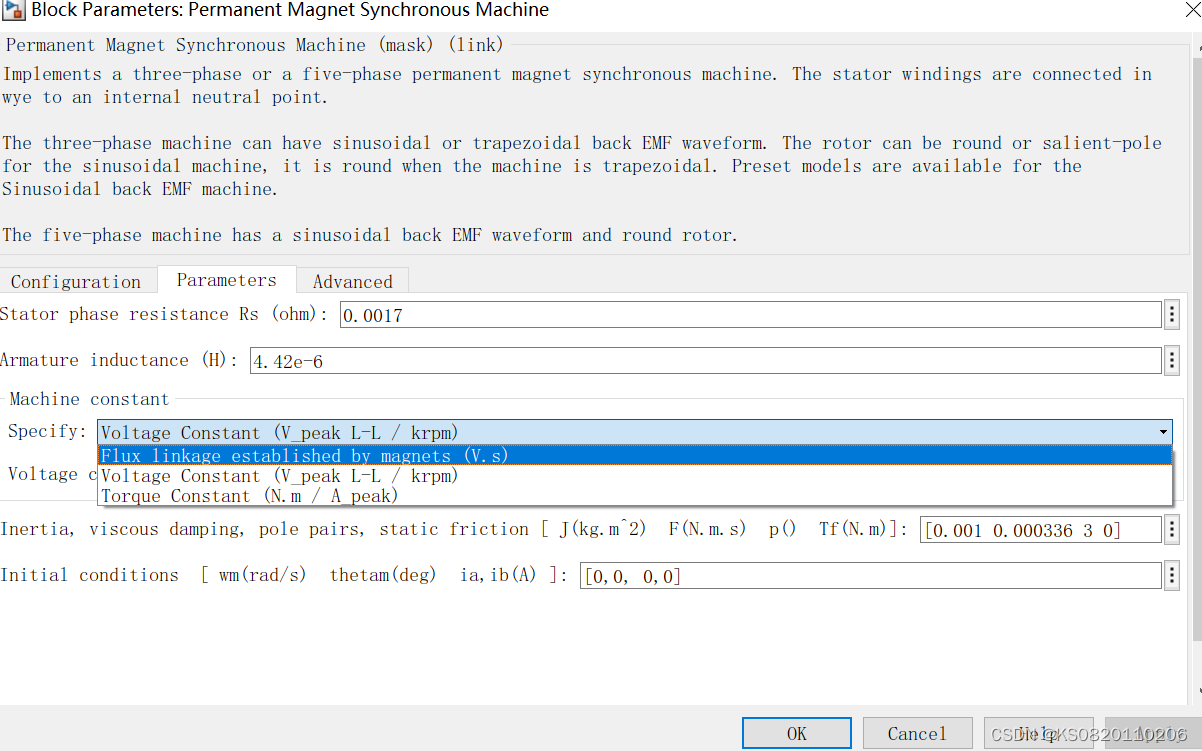
点击“apply”后可选择将电机常数改选至永磁体磁链:
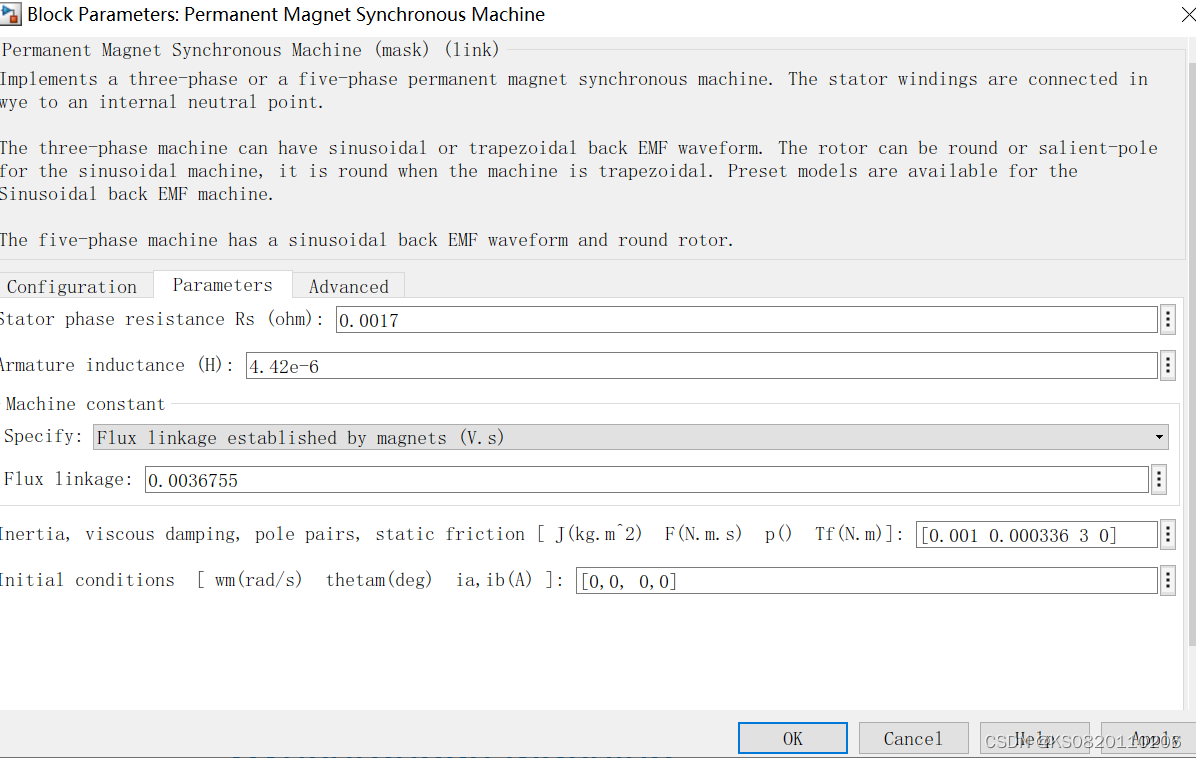
于是模块自动算出磁链相关数据为:0.0036755Wb。
下面可以通过公式进行验算:

今天做永磁同步电机控制的时候需要用到永磁体磁链数据,但是电机参数只知道反电动势常数,可以通过matlab/simulink来快速换算得出值。
已知我的PMSM反电动势常数为:2V_peak L-L/krpm,即每千转2V线电压幅值。电机极对数为3。求永磁体磁链φ。
在matlab/simulink中可以快速设置电机极对数以及电机常数进行换算:
点击“apply”后可选择将电机常数改选至永磁体磁链:
于是模块自动算出磁链相关数据为:0.0036755Wb。
下面可以通过公式进行验算:
 2万+
1671
2万+
1671

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


























