






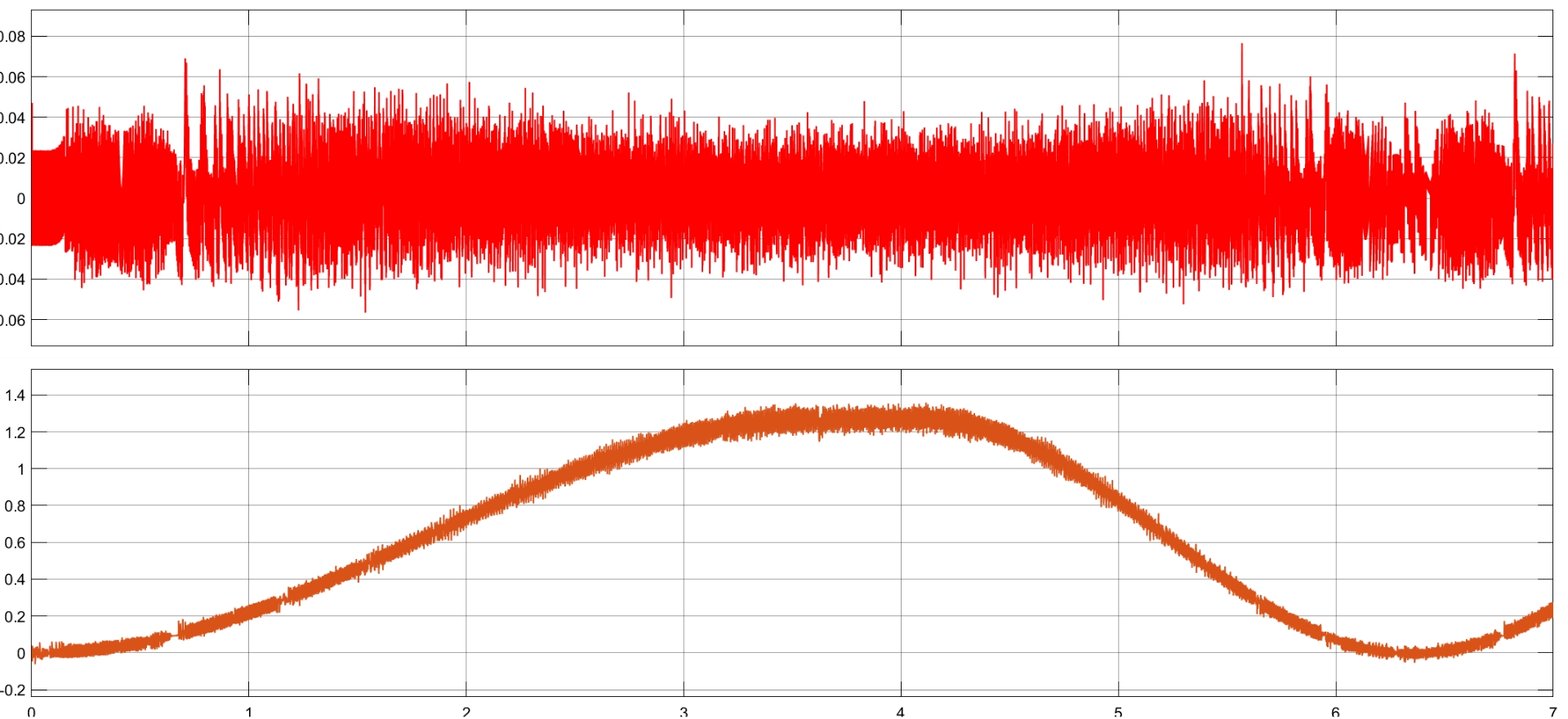
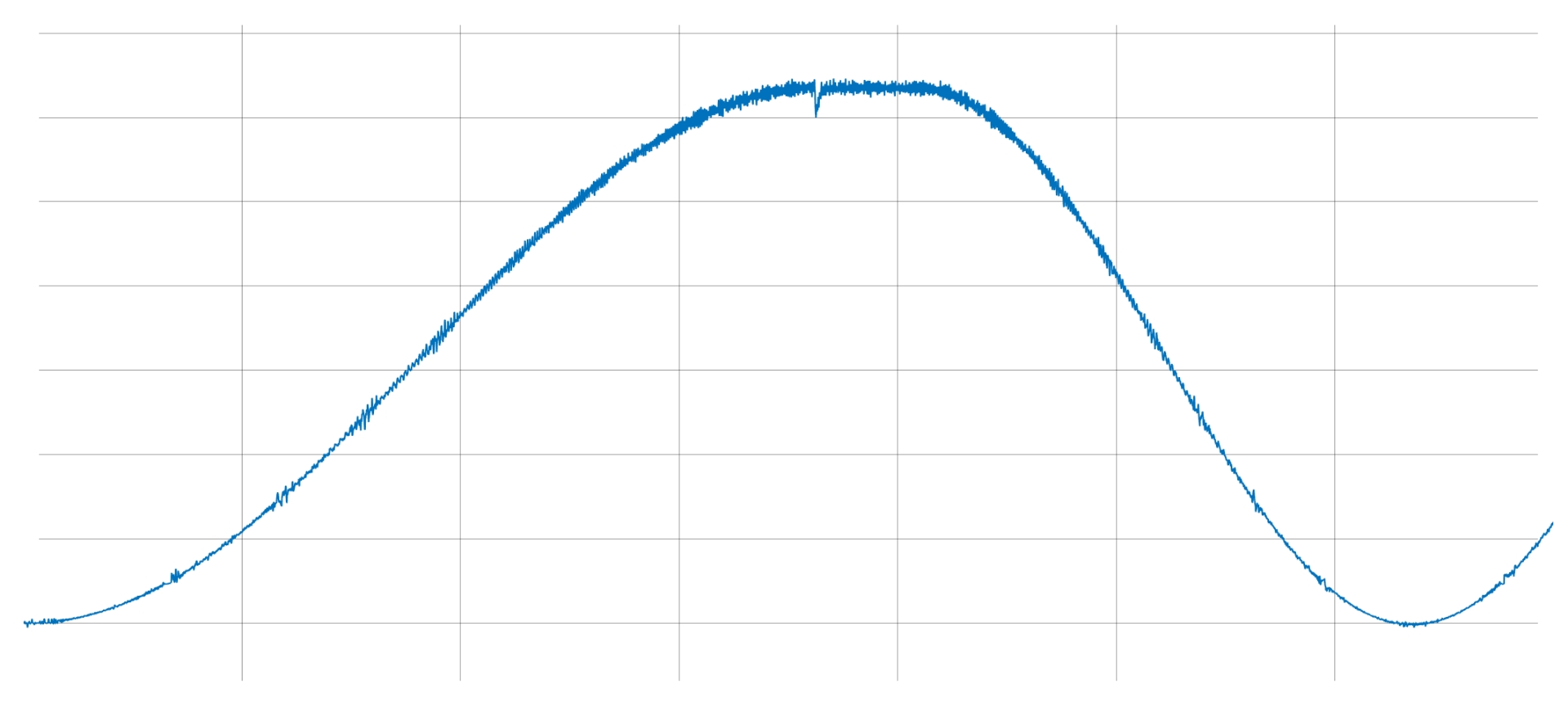
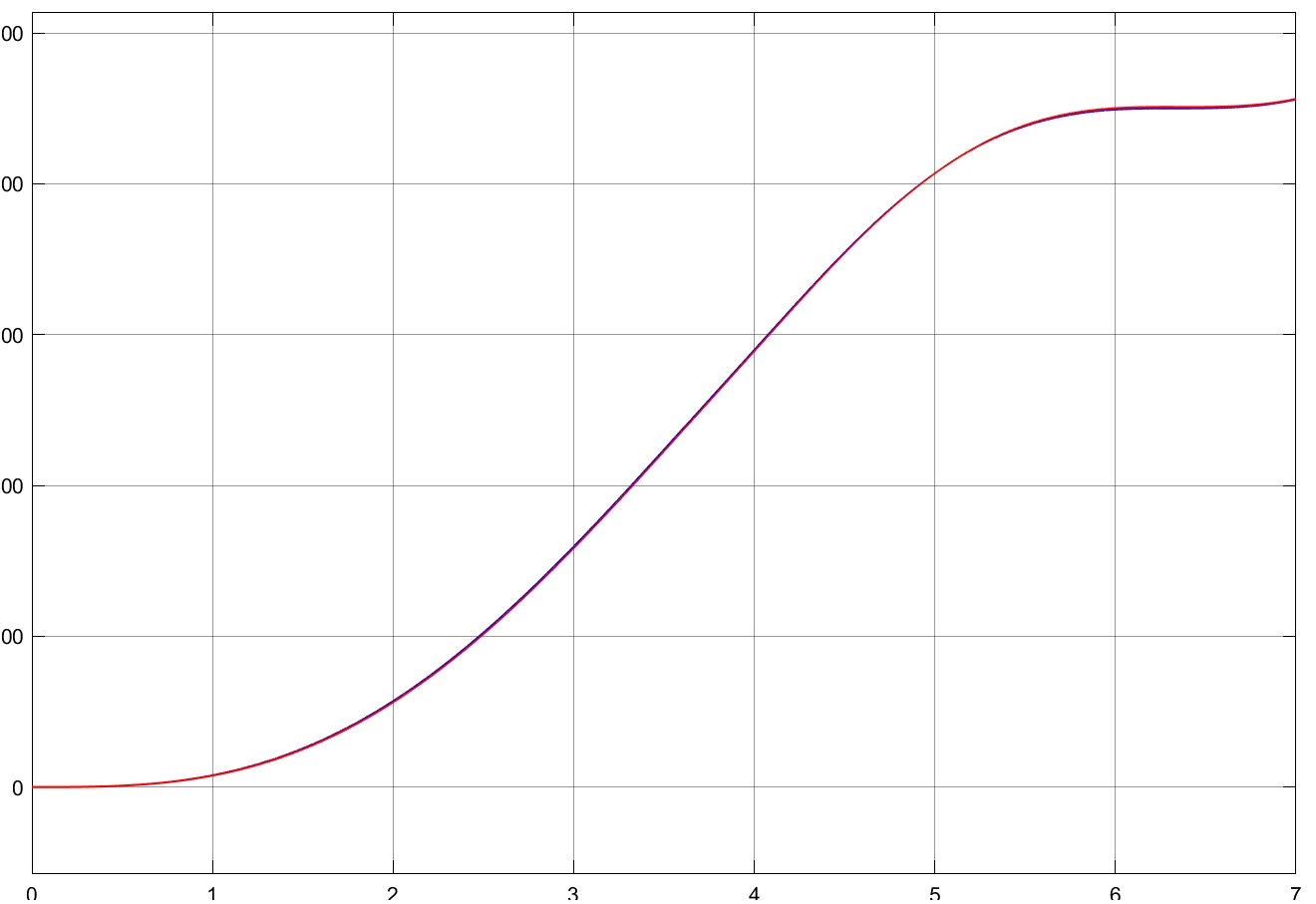
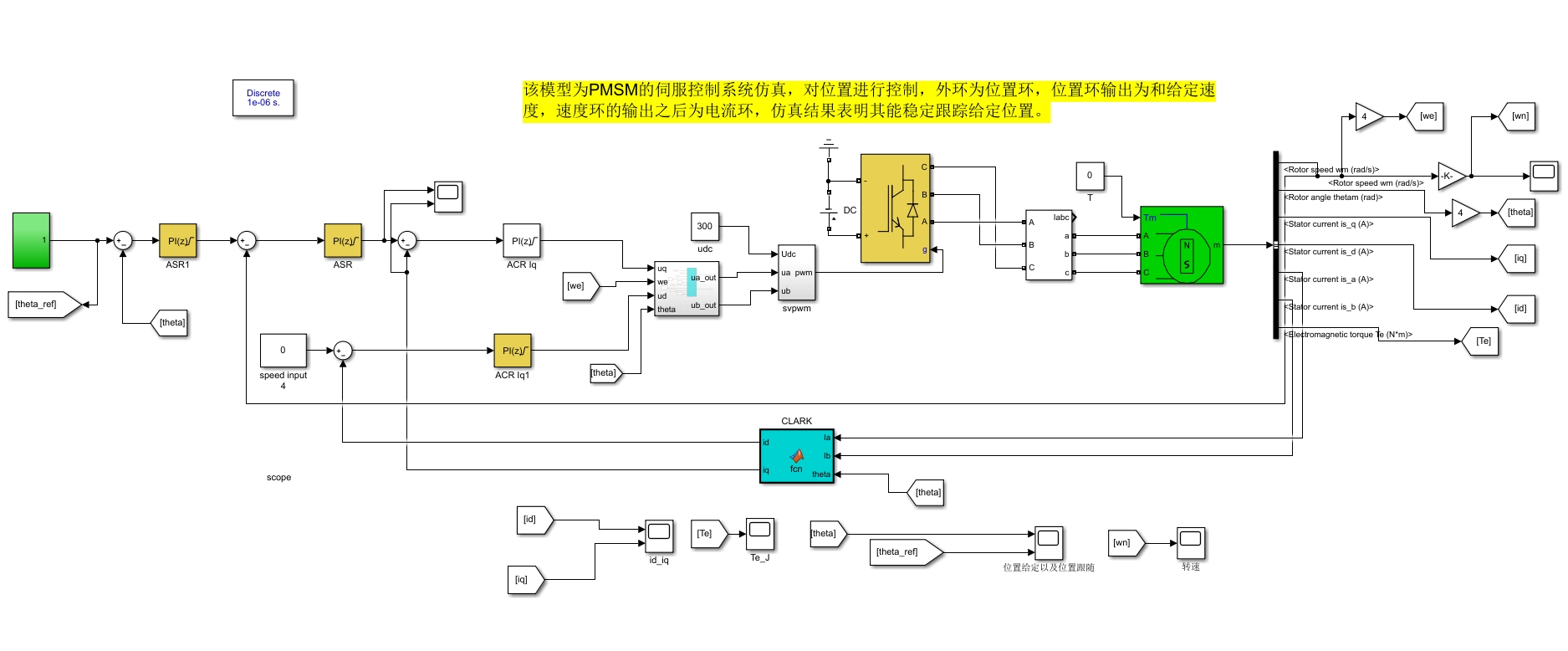
该模型为PMSM的伺服控制仿真,对位置进行控制,外环为位置环,位置环输出为和给定速度,速度环的输出之后为电流环,仿真结果表明其能稳定跟踪给定位置。
YID:85188677132331890
Keepmoving
深度解读,点: http://lanzous.cn/677132331890.html
该模型为PMSM的伺服控制仿真,对位置进行控制,外环为位置环,位置环输出为和给定速度,速度环的输出之后为电流环,仿真结果表明其能稳定跟踪给定位置。
YID:85188677132331890
Keepmoving
深度解读,点: http://lanzous.cn/677132331890.html
 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言

























