






该模型为PMSM的伺服控制系统仿真,对位置进行控制,外环为位置环,位置环输出为和给定速度,速度环的输出之后为电流环,仿真结果表明其能稳定跟踪给定位置。
ID:85188677132331890
Keepmoving
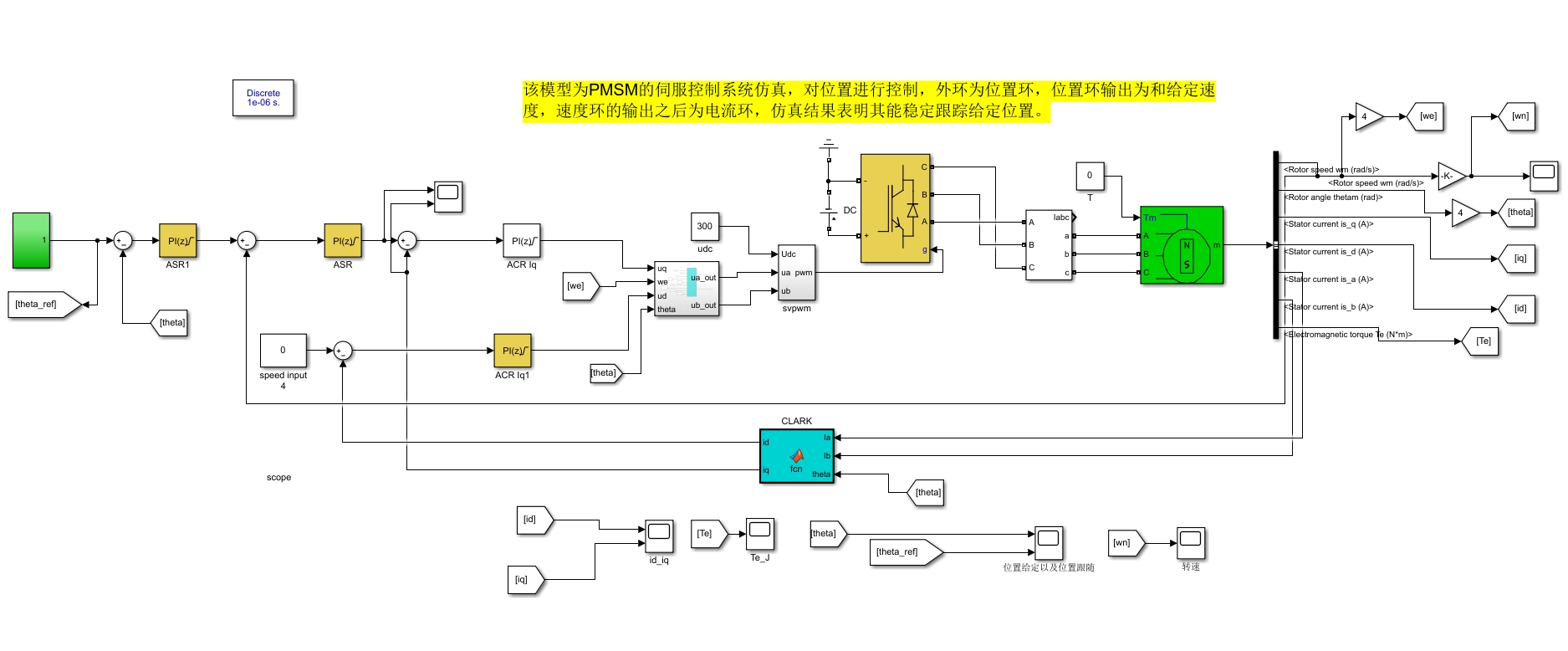
PMSM的伺服控制系统在现代工业控制领域中扮演着至关重要的角色。该系统模型的仿真分析是对其性能和稳定性进行评估的关键步骤。本文针对PMSM的伺服控制系统仿真模型,重点研究了其对位置进行控制的能力。在该系统中,外环为位置环,其输出为给定速度,而速度环的输出则进一步用于电流环的控制。通过对该模型进行仿真实验,我们验证了其在稳定跟踪给定位置方面的有效性。
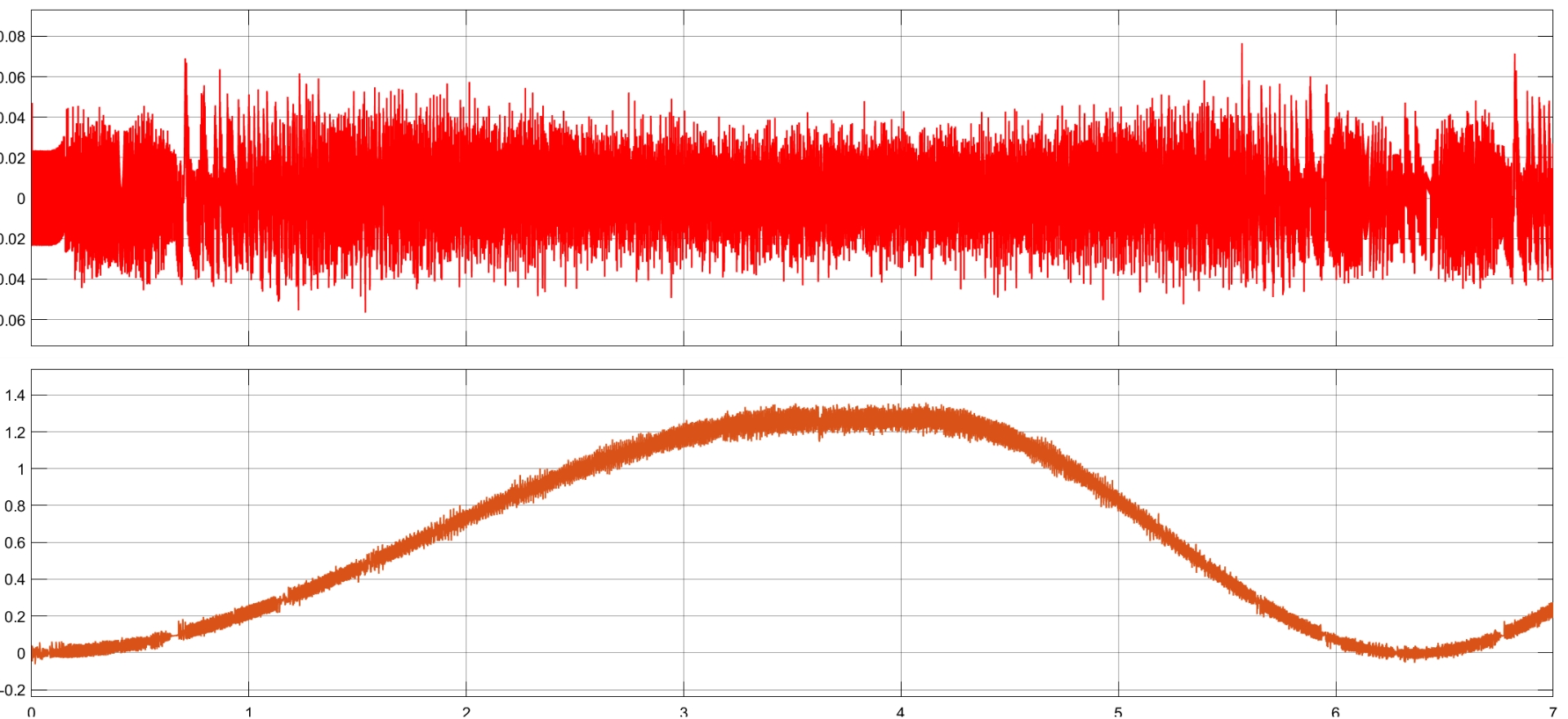
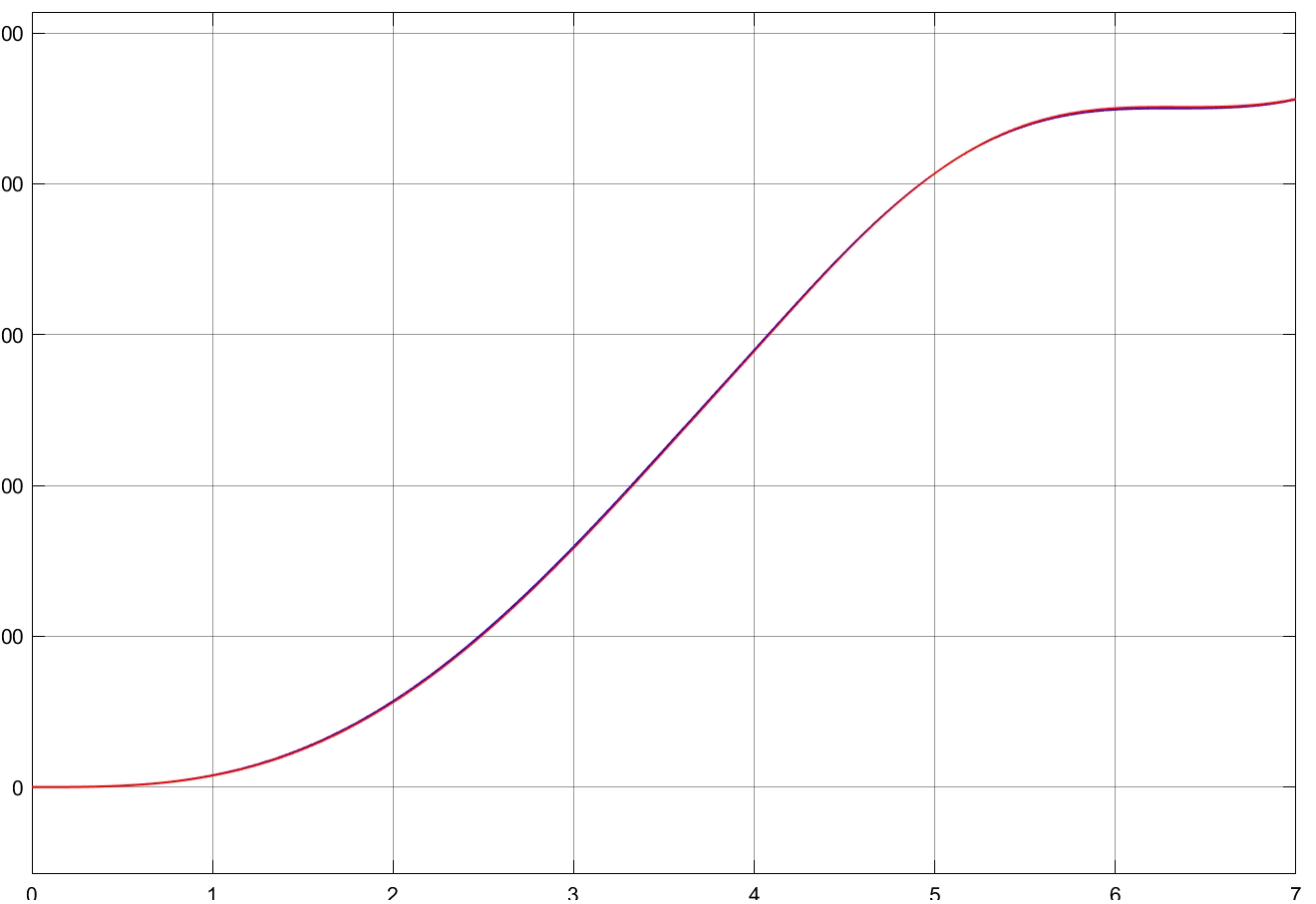
在PMSM的伺服控制系统中,位置环起到了关键作用。位置环负责将输入的位置误差与给定的目标位置进行比较,并输出相应的速度指令。通过该速度指令,系统可以控制电机的转速,从而实现对位置的控制。仿真结果显示,该系统能够准确地跟踪给定位置,并在稳定性方面表现出良好的性能。
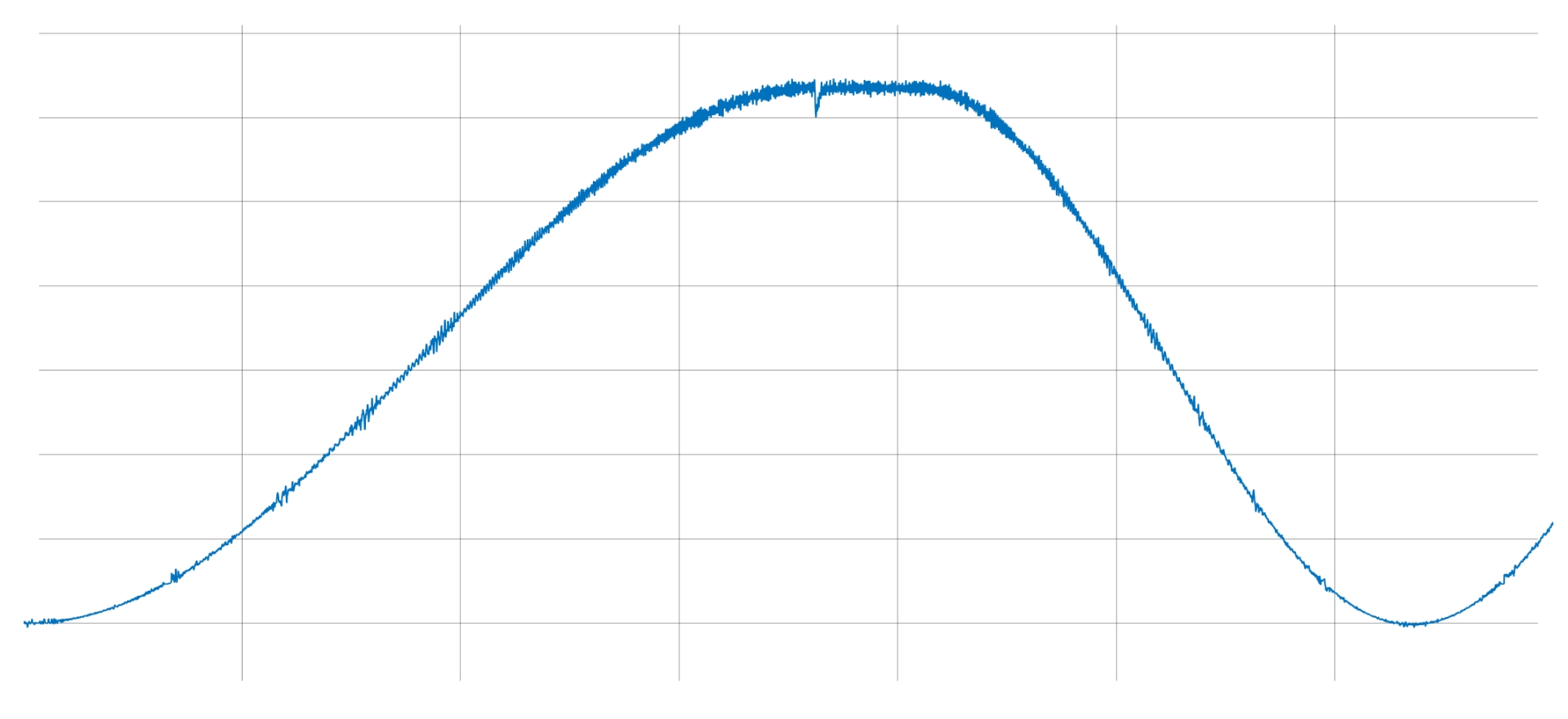
除了位置环之外,速度环和电流环也是PMSM伺服控制系统中不可或缺的组成部分。速度环根据位置环的输出,控制电机的转速。同时,速度环的输出也是电流环的输入,进一步实现对电流的控制。通过对整个系统进行仿真实验,我们验证了速度环和电流环的有效性,以及它们对位置控制的重要性。
在本次仿真实验中,我们基于PMSM的伺服控制系统模型,使用合适的控制算法和参数配置,进行了多组实验。每组实验中,我们设定了不同的目标位置,并通过统计系统的跟踪误差和响应时间来评估系统的性能。实验结果显示,该系统能够稳定地在给定位置附近进行跟踪,且响应时间短,具备较高的控制精度和稳定性。
综上所述,本文围绕PMSM的伺服控制系统的仿真模型展开了研究,并重点分析了其对位置的控制能力。通过仿真实验,我们验证了该系统在稳定跟踪给定位置方面的有效性。因此,该系统模型在工业控制领域具有广泛应用的潜力,可以为自动化生产线等领域提供高性能的位置控制解决方案。
需要注意的是,本文仅仅是对PMSM的伺服控制系统的仿真模型进行了初步研究,实际应用还需要考虑更多因素。例如,系统的稳定性和鲁棒性在不同负载和环境条件下的表现,以及适用于不同场景的控制算法的选择等。因此,未来的研究可以进一步深入探讨这些问题,以便更好地满足实际应用的需求。
总之,PMSM的伺服控制系统是一项重要的技术,具有广泛的应用前景。通过对其仿真模型的研究和分析,我们可以更好地理解系统的性能和特性,并为实际应用提供有力的支持和指导。希望本文的研究成果对相关领域的研究者和工程师有所启发,促进该技术的进一步发展和应用。
相关的代码,程序地址如下:http://nodep.cn/677132331890.html


















 703
703

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









