








DBSCAN 对点云障碍物聚类
(感谢前辈)转自:https://zhuanlan.zhihu.com/p/72121128
点云数据去除地面后,地面上的点很自然的都成了障碍物,但是要进行目标分类,还需要把每个目标的一堆障碍物的点聚集到一起,然后才好进行后续的分析,因为每个点都是空间上离的很近的点,那么很自然的,就想到了可以使用基于密度的聚类 DBSCAN ;
为了更好的适应我的需求,使用的是自己写的DBSCAN方法;
整个过程如下:
1 先做降采样,降低点云数量;
2 然后地面去除,得到障碍物的点;
3 然后把剩余的地表障碍物点送入 DBSCAN 进行聚类;
4 最后进行可视化;
聚类核心代码如下:
def vector_distance_v2(v):
"""
把单个向量内部的每个元素两两相减,得到一个差值矩阵,矩阵是上三角和下三角刚好相反的结果
:param v: 可以是一个一维数组,或者一个一维的列表
:return:
"""
if type(v) is list:
v = np.array(v)
# result = []
# for i in range(len(v)):
# result.append(v[i] - v) # 可以改为列表推导式
result = [v[i] - v for i in range(len(v))]
return np.vstack(result)
def point_distance(points):
"""
计算所有 points 两两之间的距离
:param points: 地面分割之后检测出来的点 n * 4
:return: n * n 的距离矩阵
"""
d2 = vector_distance_v2(points[:,0])**2 + \
vector_distance_v2(points[:,1])**2 + \
vector_distance_v2(points[:,2])**2
return np.sqrt(d2)
# @profile
def DBSCAN_points(points, eps=2., Minpts=15):
"""
基于密度的点云聚类
:param d_bbox: 点与点之间的距离矩阵
:param eps: 最大搜索直径阈值
:param Minpts: 最小包含其他对象数量阈值
:return: 返回聚类结果,是一个嵌套列表,每个子列表就是这个区域的对象的序号
"""
# 先求距离
print('DBSCAN clustering:',points.shape)
d_bbox = point_distance(points)
#初始化核心对象集合T,聚类个数k,聚类集合C, 未访问集合P,
T = set()
k = 0
C = []
P = set(range(d_bbox.shape[0]))
# print('P',P)
for d in range(d_bbox.shape[0]):
# print(np.sum( d_bbox[d,:] <= eps))
if np.sum( d_bbox[d,:] <= eps) >= Minpts:
T.add(d) # 最初的核心对象
print('Len T: ',len(T))
#开始聚类
while len(T):
P_old = P #
o = list(T)[np.random.randint(0, len(T))] # 从T中随机选取一个核心元素
# o = list(T)[random.randint(0, len(T)-1)] # 从T中随机选取一个核心元素
# print('o: ',o)
P = P - set([o])
Q = []
Q.append(o)
# print('Q: ',Q)
while len(Q):
q = Q[0]
# print('q: ', q)
# Nq = [i for i in range(d_bbox.shape[0]) if d_bbox[q,i] <= eps] #q的领域密度
Nq = np.where(d_bbox[q,:] <= eps)[0]
if len(Nq) >= Minpts:
S = P & set(Nq) # 这个核心对象的密度可达对象与未访问对象的交集
Q += (list(S)) # 把这个核心对象以及它的密度可达对象都包含进来,对所有的对象再做多次密度可达检测
P = P - S # 未访问集合P 减去 这个核心对象的密度可达对象
# print('S: ', S)
# print('Nq: ', Nq)
# print('P: ', P)
Q.remove(q) # q 已经做过密度可达检测了,去掉它
# print('------')
k += 1
Ck = P_old - P # 原有的P和去掉了该核心对象的密度可达对象的P就是该类的所有对象
T = T - Ck # 去掉该类对象里面包含的核心对象
C.append(Ck) # 把该类的对象加入列表
# print('noise points:', P) # 最后没有被归类的数据点就是噪音点
return C
存在的问题:
1 耗时久,计算量大;主要是由于 DBSCAN 需要计算每两个点两两之间的距离,超过5万个点就是25万的距离矩阵,就直接报内存错误了,查看任务管理器发现内存占用达到了5-9G;尽管后续极力压缩,还是需要5-6秒的时间,这显然是不可接受的;
2 它对同一个物体聚类的效果比较好,不会存在同一个物体聚类分割成了2部分的情况;但是! 它会把多个离的比较近的物体聚类为一个;
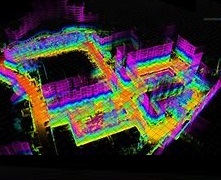
效果如下图:

因为经过了降采样,图片中的点可能不是那么亮,但是其实效果还可以;并且这个里面的地面还存在一些,因为没有使用最新的地面分割方法;
















 2697
2697

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









