







注:该内容由“数模加油站”原创,无偿分享,可以领取参考但不要利用该内容倒卖,谢谢!
A 题 支路车流量推测问题
问题 1 分析
问题1的核心任务是根据主路3的车流量数据推测支路1和支路2的车流量。在实际交通流量监测中,往往只有主路设有车流量监测设备,而支路的车流量却未必能直接获取。在这种情况下,我们需要通过已有的主路车流量数据和支路的历史车流量变化趋势,来推测各支路的车流量。具体来说,问题1设定在一个Y型道路中,支路1和支路2的车流量汇入主路3,并且已知在6:58到8:58这个时间段内主路车流量的变化趋势。支路1的车流量呈现线性增长,而支路2的车流量呈现先增长后减少的趋势,这一规律需要通过合适的数学模型来表达。
对于支路1,由于车流量呈现线性增长趋势,我们可以使用线性回归模型来进行建模,从而描述车流量随时间的变化。支路2的车流量变化则更为复杂,呈现出先增加后减少的趋势,因此我们需要使用分段线性函数或二次函数等模型来捕捉其变化的特点。由于主路的车流量是各支路车流量的总和,因此我们可以通过约束条件将主路车流量与各支路车流量的关系结合起来。在建模过程中,我们需要综合考虑历史车流量数据,设计合理的数学模型来推测各支路的车流量,并确保模型推测结果与实际观测数据之间的误差最小。此外,误差分析也是本题的关键,通过与实际观测数据的对比,可以评估模型的准确性,并对模型进行必要的优化,以提高预测精度。
解题思路:
支路1和支路2车流量推测模型
1.1 问题分析与建模目标
问题1的核心任务是通过主路3的车流量数据推测支路1和支路2的车流量。主路车流量的监测是通过安装在主路上的设备A1进行的,设备每2分钟记录一次车流量数据。然而,问题的挑战在于支路1和支路2上并未安装监测设备,因此,我们必须依赖于主路车流量数据和支路车流量的历史趋势进行推测。已知在时间段[6:58, 8:58]内,支路1的车流量呈线性增长,而支路2的车流量则呈现先增长后减少的趋势。
为了将主路车流量与支路车流量建立联系,我们可以借助数学建模的手段。首先,主路车流量是所有汇入主路的支路车流量的总和,因此,支路1和支路2的车流量应当和主路车流量之间存在一定的函数关系。基于这一点,支路车流量的推测需要从主路车流量的总和出发,结合支路车流量的历史规律,设计适当的数学模型。由于问题1中的支路车流量呈现一定的规律性,支路1和支路2的车流量分别是线性增长和先增长后减少,我们可以通过构建线性函数和分段线性函数来描述这两条支路的车流量变化趋势。基于这些要求,我们的建模目标不仅仅是推测支路车流量的大小,还需要保证模型与实际情况高度一致,同时控制模型的复杂度,避免过拟合或欠拟合。
1.2 数学建模框架
为了准确推测支路车流量,我们首先需要建立支路车流量与主路车流量之间的数学关系。假设在时间段t,主路的车流量为,支路1和支路2的车流量分别为
和
,则主路车流量与支路车流量之间的关系可以表示为:
![]()
在实际建模过程中,支路车流量的推测不仅仅取决于主路车流量数据,还要考虑历史数据和车流量的变化趋势。支路1的车流量呈现线性增长趋势,可以通过线性函数来建模,而支路2的车流量变化更为复杂,先是线性增长后再线性减少,因此,需要使用分段函数来拟合。对于支路1,我们假设车流量随时间的变化是线性的,因此支路1的车流量可以用一个简单的线性模型表示:
![]()
其中,表示车流量的增长速率,
表示支路1车流量的初始值,t是时间。这个模型假设支路1的车流量在给定时间内是连续增长的,且增长速率保持不变。
对于支路2,车流量呈现先增长后减少的趋势,这种变化模式可以用分段线性函数来描述。设定支路2车流量的增长段为,减少段为
,其函数形式可以表示为:
其中,和
是支路2车流量在增长段的参数,
和
是支路2车流量在减少段的参数,
是支路2车流量由增长转为减少的时间节点。在实际建模时,我们需要通过历史数据和推测算法来估算这些参数,从而使模型尽可能准确地反映车流量的变化趋势。
1.3 模型优化与参数估计
在问题1中,我们需要通过实际数据来估计模型中的未知参数,具体而言,估计等参数。为了实现这一目标,我们可以采用最小二乘法(Least Squares Method)来优化这些参数。最小二乘法是一种常见的参数估计方法,目的是通过最小化预测值与实际观测值之间的误差平方和,找到最佳拟合的参数。
最小二乘法的优化问题可以表述为:
其中,N是时间段内的观测时刻数,是主路车流量的实际观测数据,
和
是根据所选择的模型进行推测的支路车流量。
为了避免最小二乘法可能陷入局部最优解,我们还可以考虑使用智能优化算法,例如粒子群优化算法(Particle Swarm Optimization,PSO)或遗传算法(Genetic Algorithm,GA)来寻找全局最优解。这些智能算法通过模拟自然界中的群体行为,如粒子的运动轨迹或基因的遗传过程,能够在复杂的参数空间中寻找全局最优解,并避免传统方法可能遇到的局部最优问题。具体地,PSO可以通过以下步骤进行优化:
- 初始化粒子群,每个粒子表示一个参数组合
。
- 计算每个粒子的适应度,即最小化误差平方和。
- 通过粒子的速度和位置更新规则更新粒子的解空间位置。
- 选择适应度最优的粒子进行迭代更新,直到满足停止准则(例如最大迭代次数或误差阈值)。
1.4 结果展示与误差分析
一旦完成参数估计和模型优化,我们可以通过可视化图表来展示模型的推测结果。具体来说,我们可以绘制以下图形:
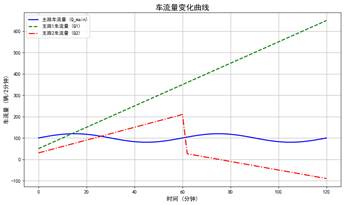
- 车流量曲线图:将模型推测的支路1、支路2和主路车流量绘制成曲线图,并与实际观测数据进行对比。通过这种方式,可以直观地展示模型的预测效果,尤其是在高峰期和低谷期的车流量变化。
- 误差分析图:绘制误差的变化图,展示模型预测值与实际值之间的误差。可以使用均方误差(MSE)等指标来量化误差,进一步评估模型的准确性。
均方误差(MSE)计算公式如下:
误差分析有助于我们判断模型的精度和拟合效果。如果误差较大,可能需要重新调整参数或优化算法。若误差较小,则说明模型较为准确,能够很好地推测支路车流量。
1.5 结果分析与结论
在完成模型推测后,我们将支路车流量的结果与实际数据进行比较,并对误差进行分析。如果模型的误差较小,则说明所采用的线性和分段线性函数能够较好地捕捉车流量的变化趋势。然而,在某些情况下,如果误差较大,可能需要对模型进行调整,例如考虑更高阶的多项式回归模型,或者通过其他算法进一步优化推测结果。
通过对比结果,我们还可以进一步分析不同优化算法的效果。例如,PSO算法可能在更广阔的解空间中找到更合适的参数组合,而传统的最小二乘法可能会受到初始值选择的影响。最终,优化后的模型将为交通信号灯的配时、交通拥堵的缓解以及道路资源规划等方面提供重要的数据支持。
Python代码:
import numpy as np
import matplotlib.pyplot as plt
# 假设的时间范围 [6:58, 8:58] 每2分钟一个数据点,时间单位为分钟
time_range = np.arange(0, 121, 2) # 从0到120分钟,每2分钟一个数据点
# 假设主路车流量Q_main (单位:辆/2分钟)
# 模拟主路车流量数据(在实际情况中应使用真实数据)
Q_main = 100 + 20 * np.sin(2 * np.pi * time_range / 60) # 假设主路车流量呈波动变化
# 支路1车流量 (单位:辆/2分钟), 假设支路1车流量呈线性增长
Q1 = 5 * time_range + 50 # 线性增长函数,假设车流量从50开始,以5辆/2分钟的速率增长
# 支路2车流量 (单位:辆/2分钟), 假设支路2车流量呈先线性增长后线性减少
t0 = 60 # 假设支路2的车流量在60分钟时达到最大值
Q2 = np.piecewise(time_range,
[time_range <= t0, time_range > t0],
[lambda t: 3 * t + 30, lambda t: -2 * t + 150]) # 分段线性增长和减少
# 绘制车流量曲线
plt.figure(figsize=(10, 6))
# 绘制主路车流量
plt.plot(time_range, Q_main, label='主路车流量 (Q_main)', color='blue', linestyle='-', linewidth=2)
# 绘制支路1车流量
plt.plot(time_range, Q1, label='支路1车流量 (Q1)', color='green', linestyle='--', linewidth=2)
# 绘制支路2车流量
plt.plot(time_range, Q2, label='支路2车流量 (Q2)', color='red', linestyle='-.', linewidth=2)
# 标注图形
plt.title('车流量变化曲线', fontsize=16)
plt.xlabel('时间 (分钟)', fontsize=12)
plt.ylabel('车流量 (辆/2分钟)', fontsize=12)
plt.legend(loc='upper left')
plt.grid(True)
# 展示图形
plt.tight_layout()
plt.show()
# 误差分析
# 计算误差:我们假设的Q_main与支路车流量的总和的误差
predicted_main = Q1 + Q2 # 预测的主路车流量(支路1 + 支路2)
error = Q_main - predicted_main # 误差(实际主路车流量 - 预测主路车流量)
# 绘制误差图
plt.figure(figsize=(10, 6))
plt.plot(time_range, error, label='误差', color='purple', linestyle='-', linewidth=2)
plt.title('车流量误差分析', fontsize=16)
plt.xlabel('时间 (分钟)', fontsize=12)
plt.ylabel('误差 (辆/2分钟)', fontsize=12)
plt.legend(loc='upper right')
plt.grid(True)
# 展示误差图
plt.tight_layout()
plt.show()
后续都在“数模加油站”......

















 604
604

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









