







目录
MULTIDIMENSIONAL SIMILARITY ANALYSIS
ABSTRACT
A novel noise subspace based method is applied to the minimum localization system using time-of-arrival (TOA) measurements from three base stations (BS). Since the distance measurement between the mobile station (MS) and the BS bears analogy to the multidimensional similarity (MDS) between their coordinates, we express the MS coordinate as the linear combination of the BSs’ coordinates, where the weight vector lies in the noise subspace of the MDS matrix. It is proved that this weight vector is the area coordinate of the MS when the triangle formed by the three BSs serves as the reference frame.
Because the dimension knowledge of the localization problem is utilized to estimate the noise subspace and to mitigate the errors in TOA measurements, the proposed method is superior to the ordinary linear localization method in most of the enhanced quadrants of the area
coordinates system.
基于噪声子空间的新方法应用于来自三个基站(BS)的到达时间(TOA)测量的最小定位系统。 由于移动台(MS)和BS之间的距离测量类似于它们坐标之间的多维相似性(MDS),我们将MS坐标表示为BS坐标的线性组合,其中权重向量位于噪声中 MDS矩阵的子空间。 证明了当由三个BS形成的三角形作为参考框架时,该权重向量是MS的区域坐标。
由于利用定位问题的维数知识来估计噪声子空间并减轻TOA测量中的误差,所提出的方法在区域坐标系的大多数增强象限中优于普通线性定位方法。
INTRODUCTION
Recently, positioning of the mobile station (MS) in cellular systems attracted large interest and the number of applications based on the location information grew rapidly. Large-scale deployment of such applications usually requires methods for positioning that are accurate
and simple enough to be used in mobile phones.
Many linear methods have been proposed to estimate the MS position in closed-form.
The first and simplest of the existing methods is the Cell ID (CID) method where the position estimate is the coordinate of the serving BS.
The second of the existing methods is described in [1], the MS position is calculated as the average (centroid) of the positions of all N BSs whose beacons the MS can decode. It is called UnWeighted Centroid (UWC) method.
The CID method can be regarded as a special case of UWC with N=1. In [2], three approximated linear methods were proposed to estimate the position of the MS. The first, Path-Gain Weighted Centroid (PGWC) method, is based on signal strength, the second, Time Weighted Centroid (TWC) method, is based on time, and the third, PGWC+TA, is a hybrid between time and signal-strength methods.
Finally, the third benchmark method uses circular multilateration of propagation delays. This is sometimes known as Time-of-Arrival (TOA) [3]. In our implementation of TOA localization, the ordinary method calculates the MS positions from the MS-BSi propagation delays using a linear and closed-form solution [4].
In this paper, we propose a simple but quite accurate localization method and compare it with the ordinary method by means of simulation. Our results show that in the noisy measurement environment, the proposed algorithm is superior to ordinary linear localization methods in most of the enhanced quadrants of area coordinates system. Unlike the enhanced quadrant-aware localization method in [5] and [6], the linear weight vector in the proposed method is derived from multidimensional similarity analysis.
Our proposed methods are very simple and do not require complicated calculations as opposed to some iterative methods [7]-[9]. The performance measures are coordinate bias and cumulative distribution function of the root mean square location error, and the evaluation is done for seven quadrants in the area coordinate system.
Because the dimension knowledge of the localization problem is utilized to estimate the noise subspace and to mitigate the errors in range measurements, the proposed method is superior to the ordinary linear localization method in most of the enhanced quadrants.
注:红色字体部分是论文所做的工作!
LINEAR TOA LOCALIZATION
Consider the problem of MS location using range measurements from three BSs. Assume that the BSs locate at and the MS locates at
in the system of rectangular coordinates.
The MS position can be expressed as
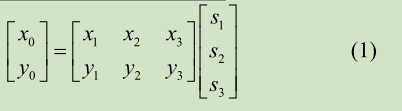
It is the linear combination of BSs’ position, where the weight vector is not unique. Introducing the following constraint
![]()
Equation (1) becomes
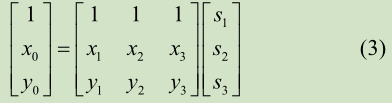
From Cramer’s determinant formula, we have

It can be proved that the absolute value of is the normalized area (with respect to the area of triangle formed by BS1, BS2 and BS3) of triangle formed by (MS, BS2, BS3), (MS, BS1, BS3) and (MS, BS1, BS2), respectively.
可以证明 的绝对值是由(MS,BS2,BS3),(MS,BS1,BS3)和 (MS,BS1,BS2)形成的三角形的归一化区域(相对于由BS1,BS2和BS3形成的三角形的区域)。
Therefore, we call area coordinates of the MS. The signs of
are determined by the enhanced quadrant in which the MS lies [5]. As shown in Fig.1, we have seven quadrants in area coordinate system, whereas four in rectangular coordinate system.
因此,我们称MS为 区域坐标。
的符号由MS所在的增强象限决定[5]。 如图1所示,我们在面积坐标系中有七个象限,而在直角坐标系中有四个象限。

From (3), we have the following orthogonal property,
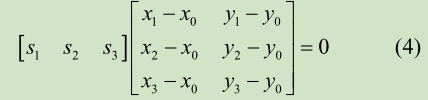
which means that the vector lies in the orthogonal subspace spanned by vectors
and
.
If the vector is estimated from TOA measurements, the MS position can be calculated from (4).
In [5], the absolute value of area coordinate of MS is estimated by using Heron formula, but the sign is determined by the enhanced quadrant information. When this information is not known, it may be determined from an original estimation of MS position. However, when the MS locates close to the axes of the reference triangle, the ambiguity of the enhanced quadrant will degrade the location performance.
In the following two sections, we introduce the multidimensional similarity (MDS) matrix and establish the relationship between the vector and the null space of the MDS matrix. Based on this relationship, we can calculate the vector
from the null subspace of the MDS matrix without additional quadrant information.
MULTIDIMENSIONAL SIMILARITY ANALYSIS
Assume that the distance between the i-th BS and the MS is , between the i-th BS and the j-th BS is
. Note that
and
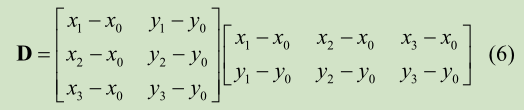
. Define a symmetric matrix as
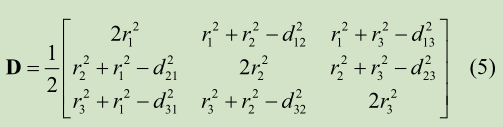
Denote the element of matrix D by , i, j=1,2,3.
From cosine formula, we have

where is the angle between the vectors
and
. Therefore, we have
It can be seen that the matrix D is semi-positive with the rank equaling to 2 if vectors and
is not correlated, and
, the elements of Matrix D is the correlation between the vectors
and
Because measures the similarity between two vectors, matrix D is also called multidimensional similarity matrix [10].
SUBSPACE BASED LOCALIZATION
Let the eigenvalue decomposition of D be
![]()
where ,
and
Because the rank of matrix D equals to 2, we have
and
From (6), we have
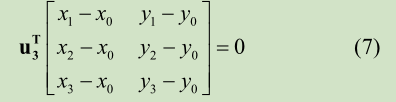
Comparing (4) with (7) yields
![]()
where

is sum of the elements of vector . From (7), a novel subspace based position estimation can be given by

SIMULATION RESULTS
In this section, we compare the proposed location method with the ordinary method, which gives the position estimation as [4]

As shown in Fig.1, three base stations locate at (0, 0), (2500, 4330) and (5000, 0), and the range measurement error is Gaussian distributed with zero mean and standard deviation of 30, all the units are meter. To compare the performance of the above two methods, seven mobile stations are fixed in different quadrant of area coordinate system.
Table 1 gives the comparison results of the root mean square location error. They are obtained from 300 runs at each MS position. It can be seen that the improvement of the proposed method is significant in quadrant 2, 4, 5 and 7. Because the root mean square location error is not enough to reflect the distribution of location error, we also plot in Figs.2-5 the estimation bias of x and y coordinates obtained in each run.
如图1所示,三个基站位于(0,0),(2500,4330)和(5000,0),距离测量误差为高斯分布,零均值和标准差为30,所有单位 是米。 为了比较上述两种方法的性能,将7个移动台固定在不同的区域坐标系的象限中。
表1给出了均方根位置误差的比较结果。 它们来自每个MS位置的300次运行。 可以看出,所提方法的改进在象限2,4,5和7中是显着的。由于均方根位置误差不足以反映位置误差的分布,我们也在图2-5中绘制。 每次运行中获得的x和y坐标的估计偏差。

Comparison of location error in different quadrant of area coordinate system is illustrated in Figs.2-5. The left two columns of these figures are the location bias of x and y coordinates obtained from the proposed method and the ordinary method, respectively, and the right column is the cumulative distribution function (CDF) of the root mean square location error (solid line: the proposed method, dotted line: the ordinary method). Though the location error distributes differently in each quadrant, it can be seen that the improvement of the proposed method is significant in most of quadrants, except quadrant 3.
区域坐标系不同象限的位置误差比较如图2-5所示。 这些图的左两列分别是从所提出的方法和普通方法获得的x和y坐标的位置偏差,右列是均方根位置误差的累积分布函数(CDF)(实线) :提出的方法,虚线:普通方法)。 尽管位置误差在每个象限中的分布不同,但可以看出,除了象限3之外,所提方法的改进在大多数象限中都很重要。
CONCLUSION
This paper establishes the relationship between the weight vectors of the enhanced quadrant-aware method and the proposed dimension-aware method, which estimate the rectangular coordinates of the mobile station by linear combination of that of the base stations. Unlike the former method, the linear weight vector is estimated from multidimensional similarity analysis and the additional enhanced quadrant information is not required in the proposed method. Simulation results shown that the proposed method performs better than the ordinary method in most of quadrants in area coordinate system.
本文建立了增强象限感知方法的权向量与所提出的维数感知方法之间的关系,该方法通过基站的线性组合来估计移动台的直角坐标。 与前一种方法不同,线性权重向量是从多维相似性分析估计的,并且在所提出的方法中不需要附加的增强象限信息。 仿真结果表明,该方法在区域坐标系中的大多数象限中均优于普通方法。



注:至于仿真我会试一下,将这片论文拿出来做笔记的原因在于觉得这是一种不错的方法。我们可以触类旁通,用到其他方面,不仅仅是在通信中。例如,电子对抗定位中。
仿真地址:https://blog.csdn.net/Reborn_Lee/article/details/84206489
REFERENCES
[1] N. Bulusu, J. Heidemann, D. Estrin, “GPS-less Low-Cost Outdoor Localization for Very Small Devices”, IEEE Personal Communications Mag., Vol. 7, No. 5, pp. 28-34, Oct 2000.
https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=878533&tag=1
[2] M. Berg, “Performance of mobile station location Methods in a Manhattan Microcellular Environment”, Technical Reports from Signal Processing, Royal Institute of Technology, Sweden, Oct 2002.
https://www.researchgate.net/publication/2362632_Performance_Of_Mobile_Station_Location_Methods_In_A_Manhattan_Microcellular_Environment
[3] J.J. Caffery, G.L. Stüber, “Overview of Radiolocation in CDMA Cellular Systems”, IEEE Communications Mag., Vol. 36, No. 4, pp. 38 45, Apr 1998.
https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=667411&tag=1
[4] J. J. Caffery, Wireless Location in CDMA Cellular Radio System, Kluwer Academic Publishers, Boston Dordrecht London, 2000.
http://gpreview.kingborn.net/268000/7c9a7a245ef74bf4b743fed11886cf73.pdf
[5] Q. Wan, S. J. Liu, F. X. Ge, J. Yuan, Y. N. Peng, W.L. Yang, “A Quadrant-Based Range Location Method”, IEEE Conference on VTC, pp. 210-212, Apr 2003
https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=1207532
[6] Q. Wan, Y. N. Peng, “An Improved 3-Dimensional Mobile Location Method Using Volume Measurements of Tetrahedron”, IEICE Transactions on Communications, Vol. E85-B, No.9, pp. 1817-1823, Sept. 2002
https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=1021473
[7] Y. T. Chan, K. C. Ho, “A Simple and Efficient Estimator for Hyperbolic Location”, IEEE Transaction on Signal Processing, Vol.42, No.8, pp. 1905-1915, 1994.
https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=301830
[8] J. O. Smith, J. S. Abel, “The Spherical Interpolation Method of Source Localization”, IEEE Journal of Oceanic Engineering, Vol. 12, No. 1, pp. 246-252, 1987.
https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=1145217
[9] Q. Wan, Y. N. Peng, “Enhanced Linear Estimator for Mobile Location using Range Difference Measurements”, IEICE Transactions on Communications, 2002, E85-B(5): 946-950.
[10] I. Borg, J. Lingoes, Multidimensional Similarity Structure Analysis, Springer-Verlag, New York, 1987.
https://link.springer.com/book/10.1007%2F978-1-4612-4768-5
原论文地址:https://download.csdn.net/download/reborn_lee/10792598
















 4883
4883











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











