







目录
Recurrent Feature-Shift Aggregator
Abstract
在本文中,我们提出了一个新的模块并行特征转移聚合器(RESA),用普通CNN进行初步特征提取后,以丰富车道特征。
它经常向垂直和水平方向移动切片特征贴图,并使每个像素能够收集全局信息。RESA可以通过逐片信息的传播,在具有挑战性的场景中准确地推测车道。
我们提出了一个双边上采样解码器,它结合了粗粒度和细粒度的特征在上采样阶段。它可以将低分辨率特征图恢复到像素级预测。
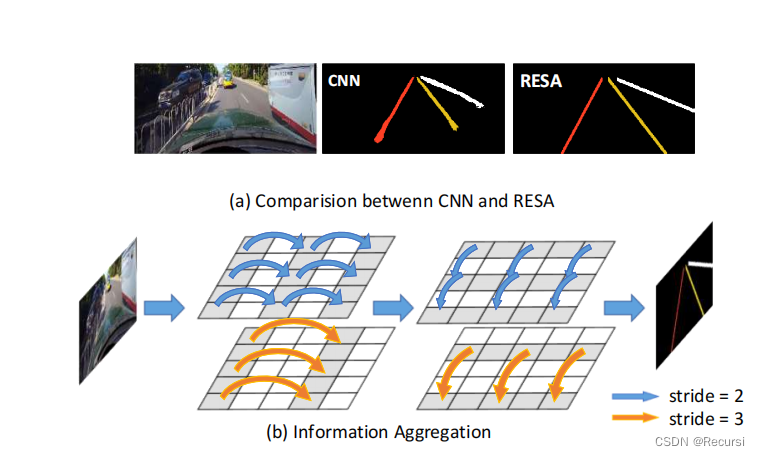
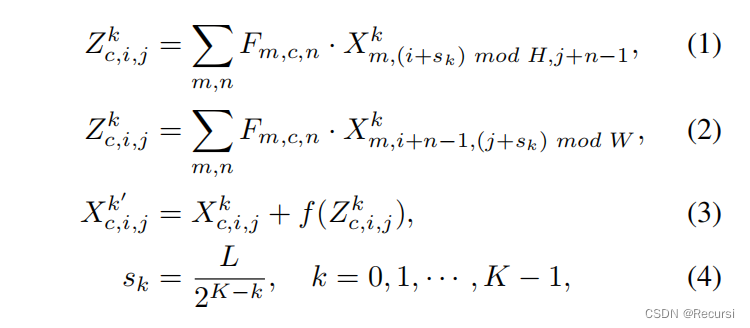
RESA将首先在垂直和水平方向上切割特征地图,然后让每个切片特征接收到与特定步幅相邻的另一个切片特征。每个像素分几个步骤同时更新,最后每个位置都可以在整个空间中收集信息。这样,信息就可以在特征图中的像素之间传播
因此,RESA可以推断出车道,即使它们被遮挡了。我们添加了不同的步幅来收集不同距离内的特征,
从而缓解了长距离传播过程中的信息丢失问题
RESA有三个主要优点:1)RESA以并行的方式传递信息,从而显著降低了时间成本。2)信息将在RESA中以不同的步伐传递。因此,可以在传播过程中不丢失信息的情况下收集不同的切片特征图。3)RESA功能简单而灵活,可以被
整合到其他网络中。
BUSD有两个分支。一种是捕获粗粒度的特征,另一种是捕获细细节的特征。
contributions
我们提出RESA通过在垂直和水平方向上周期性地移动切片特征图来聚合空间信息。RESA可以很容易地合并到其他网络中,以获得更好的性能。
进一步提出了双边上采样解码器来精心恢复低分辨率的特征图。
Method
我们的模型由三个组成部分组成:编码器、聚合器和解码器。

由解码器进行上采样后,利用输出特征图预测每个车道的存在性和概率分布。采用全连通层进行存在性预测,并进行二值分类。对车道概率分布预测进行像素级预测,这与语义分割任务相同。
Recurrent Feature-Shift Aggregator




Bilateral Up-Sampling Decoder
.解码器由两个分支组成,一个是恢复粗粒度特征,另一个是修复细节损失。其结构如图4所示。输入将通过两个分支,并将产生2倍的上采样输出的一半通道数。在通过这些堆叠的解码器块后,由RESA生成的1/8个特征图将被
恢复到与输入图像相同的大小。



Experiment


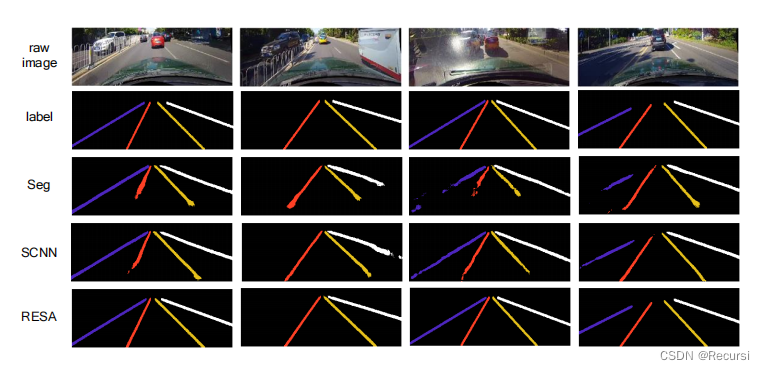
如图5所示,由于严重的遮挡,分割方法无法保持车道标记的平滑性和连续性。

当我们在RESA中添加更多的方向时,我们可以得到更高的f1-度量。

如表6所示,随着迭代次数的增加,性能会更好。然而,更多的迭代会导致更多的计算时间成本。它是性能和计算资源之间的一种权衡。为了在它们之间取得平衡,我们选择迭代=4作为我们最终的选择。


如表8所示,具有相同核宽度的RESA比SCNN快10倍左右,这使得我们的方法有望应用于实时应用。














 754
754











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









