






全球人形机器人本体公司背景可大体分为:汽车制造企业(特斯拉、小鹏等)、机器人企业(优必选、宇树等)、科研院校孵化(银河通用等)和互联网和自动驾驶背景创业团队(星尘智能、1X等),目前科研院校教授“兼职”创业占据国内人形本体初创企业半壁江山。
具身智能/人形机器人领域,UC Berkeley属于神一般存在,本篇重点介绍UC Berkeley“归国四子”:吴翼、高阳、许华哲和陈建宇,四位发展路径出奇的一致,都是“清华大学—UC Berkeley—清华交叉信息研究院担任助理教授—具身智能领域创业”。
接下来小编介绍四人归国后发展现状:
清华大学-智能系统与机器人实验室(ISR Lab)

实验室简介:清华大学智能系统与机器人实验室(ISR Lab)隶属于清华大学交叉信息研究院和上海期智研究院,由陈建宇助理教授组建和指导,专注于人工智能与机器人技术的融合,致力于打造性能卓越的高端机器人系统。
实验室官网:https://group.iiis.tsinghua.edu.cn/~isrlab/
实验室研究方向:涵盖强化学习、机器人技术、控制理论、大模型等。近期,研究组主要聚焦于人形机器人与具身智能研究。
实验室负责人:陈建宇;目前担任清华大学交叉信息研究院助理教授;于清华大学取得学士学位,在加州大学伯克利分校取得博士学位,师从美国国家工程院院士、机电控制学科先驱Masayoshi Tomizuka教授;在机器人、人工智能、控制、交通等领域的国际顶级会议和期刊上发表了五十余篇论文,部分论文入围L4DC 2022、IEEE IV 2021、IFAC MECC 2021等国际会议优秀论文奖。个人荣誉:福布斯中国30位30岁以下精英;目前担任国内人形机器人初创公司【星动纪元】创始人,公司已完成两轮融资。
具身智能领域相关论文(标志性):(仅展示部分)
-
Advancing Humanoid Locomotion: Mastering Challenging Terrains with Denoising World Model Learning(DWL),Xinyang Gu ,Yen-Jen Wang ,Xiang Zhu ,Chengming Shi ,Yanjiang Guo ,Yichen Liu ,Jianyu Chen
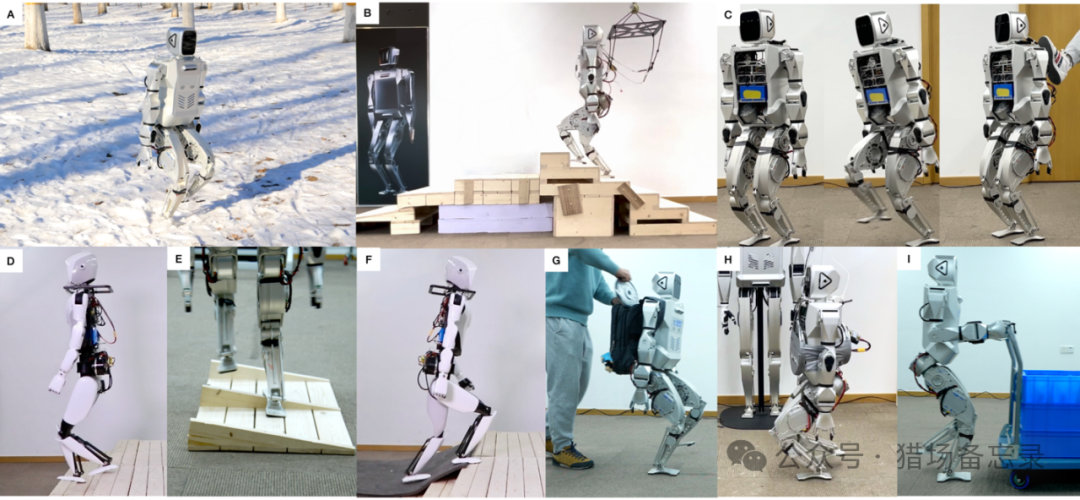
论文地址:5aed91e0-0121-45e5-9f7e-edce6d130508.pdf (baai.ac.cn)
-
DoReMi: Grounding Language Model by Detecting and Recovering from Plan-Execution Misalignment,Yanjiang Guo,Yen-Jen Wang,Lihan Zha, Zheyuan Jiang, Jianyu Chen (2023)
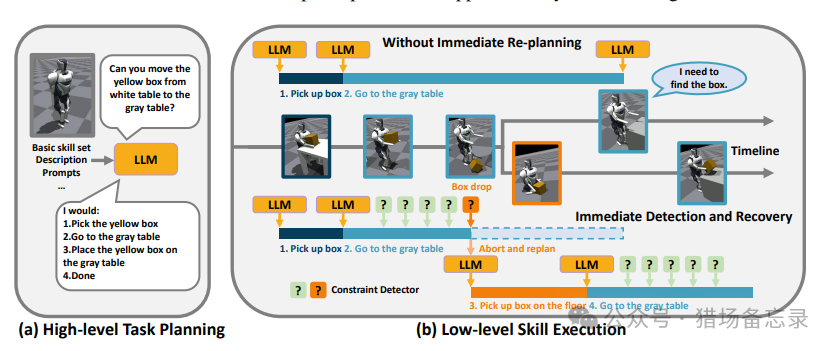
论文地址:DoReMi: Grounding Language Model by Detecting and Recovering from Plan-Execution Misalignment | ISR Lab (tsinghua.edu.cn)
清华大学-具身智能实验室(TEA Lab)
实验室简介:清华大学具身智能实验室(Tsinghua Embodied AI Lab,简称TEA Lab)隶属于清华大学交叉信息研究院,由许华哲助理教授组建和指导,目前该实验室的主要目标是使机器人可以在任何场景、任何条件(如视角、光照、遮挡等)、对任何物体、任何物体状态进行操作。
实验室研究方向:策略泛化性研究;模仿学习和强化学习算法的数据效率和规模效应;无仿真物理真机强化学习;多模态机器人数据和数据采集方式;复杂机器人操作任务(如全身控制的移动操作、灵巧手操作、软体操作等)。
实验室官网:无
实验室负责人:许华哲:目前是清华大学交叉信息研究院的助理教授、清华大学具身智能实验室负责人;博士后就读于斯坦福大学,和李飞飞团队的吴佳俊合作;博士毕业于加州大学伯克利分校,导师为Trevor Darrell教授,本科就读清华大学;曾获顶级智能机器人会议CoRL'23最佳系统论文,在IJRR, RSS,NeurIPS等发表顶级期刊/会议论文五十余篇。目前担任国内人形机器人初创公司【星海图】联合创始人,公司已完成两轮融资。
具身智能领域相关论文(标志性):(仅展示部分)
-
3D Diffusion Policy: Generalizable Visuomotor Policy Learning via Simple 3D Representations,YanjieZe,GuZhang,Kangning Zhang,Chenyuan Hu,Muhan Wang,Huazhe Xu
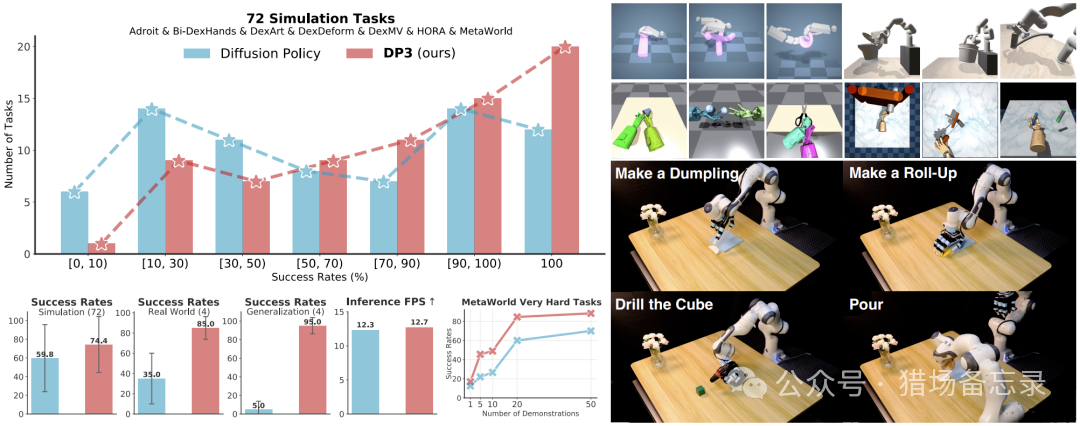
新型视觉模仿学习算法:3D扩散策略(DP3),论文被机器人顶会RSS接收
论文链接:https://arxiv.org/abs/2403.03954
项目主页:https://3d-diffusion-policy.github.io/
代码链接:https://github.com/YanjieZe/3D-Diffusion-Policy
-
Robo-ABC: Affordance Generalization Beyond Categories via Semantic Correspondence for Robot Manipulation, Yuanchen Ju, Kaizhe Hu, Guowei Zhang, Gu Zhang, Mingrun Jiang, Huazhe Xu, ECCV 2024.
Robo-ABC 是一种新的机器人操控框架,旨在使机器人能够泛化地理解和操作在训练时未见过的类别的物体。
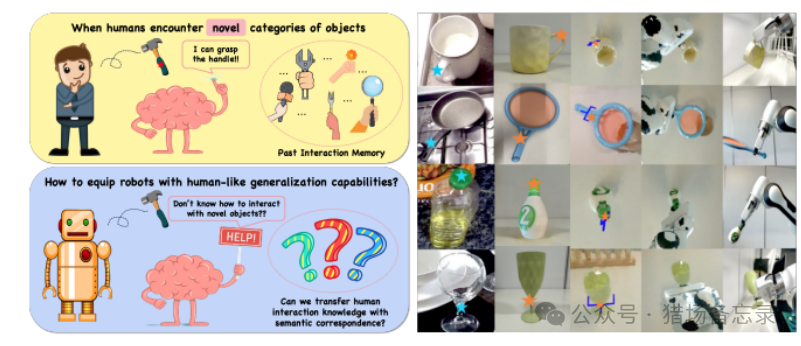
项目主页:https://TEA-Lab.github.io/Robo-ABC
... ... ...
接下来,小编将介绍其他国内顶级高校(北京大学、上海交通大学、复旦大学、香港科技大学、UC Berkeley等)内具身智能相关实验室(包括实验室简介、实验室研究方向、实验室负责人履历和科研成果等)。
... ... ...
本文内容仅展示一部分,更多详细解读,加入知识星球“机器人头条”,查看完整版文章:【原创】国内外高校具身智能相关实验室汇总,并深度了解“具身智能&人形机器人”赛道



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









