






2025年2月6日,摩根士丹利(Morgan Stanley)发布最新人形机器人研报:Humanoid 100: Mapping the Humanoid Robot Value Chain(人形机器人100:全球人形机器人产业链梳理)。
Humanoid 100清单清单中的公司被分为三个主要类别:“Brain”(大脑)、“Body”(身体)和“Integrators”(集成商),又将身体(Body)细分为传感器、电池、半导体(模拟)、线束、热管理、自动化等。
榜单中,大脑层面,全球共22家,含中国两家(百度和地平线);集成商层面,全球共22家,含国内10家(小米、优必选、广汽集团、小鹏汽车等);而身体层面,全球共64家,含中国24家(旭升集团、亿纬锂能、宁德时代、双林股份、拓普集团、三花智控、汇川技术、绿的谐波、双环传动、中大力德、雷赛智能、埃斯顿、兆威机电、鸣志电器、金力永磁、北方稀土、北特科技、恒立液压、韦尔股份、柯力传感、速腾聚创以及台湾上银科技和鸿海精密/富士康)。
中国在身体方面占主导地位,具备更为完备的零部件供应链,但是作为机器人智能核心的大脑层面参与者极低。
[摩根士丹利]预测未来中国和美国将是未来全球人形机器人主要市场;并预测未来全球人形机器人的市场规模将达到60万亿美元。
万亿美元人形机器人市场下,各头部人形机器人公司核心零部件厂商也备受关注,往日最受瞩目的是T链(特斯拉)、Hl链(华为),随着宇树爆火,目前又出现了宇树链。
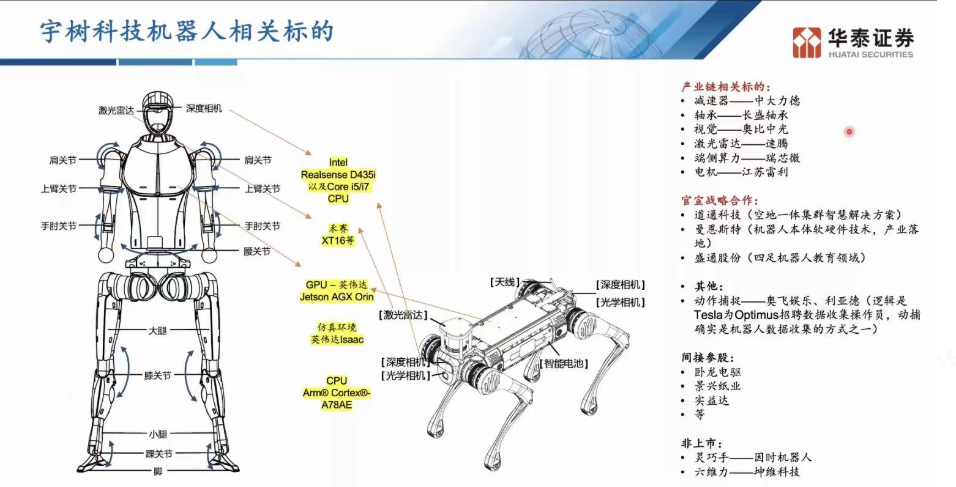
接下来小编将从传动系统和动力系统、智能感知系统、材料三大部分,详细盘点13家[宇树机器人]核心供应链企业(根据网络资料整理):
一、精密传动和动力传统:
中大力德:国内精密减速器领域的头部企业
中大力德(股票代码:002896)通过其参股的深创投持有宇树科技10%的股份。
中大力德是宇树科技的核心减速器供应商,为其提供高精度的行星减速器、谐波减速器等关键零部件;凭借微型减速器与伺服电机一体化模组的研发优势,助力宇树实现关节驱动系统的高功率密度,其行星减速器在动态响应精度上已达国际一线水平。
中大力德(股票代码:002896)始创于1998年,是一家集电机驱动、微特电机、精密减速器、机器人结构本体及一体化智能执行单元的研发、制造、销售、服务于一体的国家高新技术企业;其精密减速器、驱动器、伺服电机等产品可用于机器狗、人形机器人的传动和精度控制等系统。

卧龙电驱(股票代码:600580):
卧龙电驱(股票代码:600580)通过金石投资间接持有宇树科技股份,后者持有宇树科技约5%的股份。
据相关信息,卧龙电驱的无框力矩电机及关节模组已送样给宇树科技,并且与浙江人形机器人创新中心、智元机器人、云深处也有关节模组方面的合作,其产品还与多家仿生机器人下游客户开展了联合研发、送样测试等工作,部分客户已形成小批量订单,但出于保护商业秘密,其余具体客户暂未透露。

卧龙电驱于1998年浙江绍兴成立,是一家集电机及控制、光伏与储能、工业互联网等多元化业务于一体的大型企业集团;针对人形机器人和工业机器人需求,布局了高爆发关节模组、伺服驱动器、无框力矩电机等关键部件。
江苏雷利(股票代码:300660):
据相关信息,江苏雷利(股票代码:300660)为宇树机器狗提供“无刷电机+齿轮箱”行星执行器及动力传输产品;这些产品被应用于宇树机器狗中,能够高效地将电机动力传递到机器人的各个关节,确保机器人在运动过程中具备充足的动力支持;目前,江苏雷利的行星执行器已进入批量生产阶段,显示出双方合作已进入实质性生产环节;随着宇树科技产品的迭代升级,江苏雷利的相关产品也在持续研发升级。
公司于2006年江苏常州市成立,专注于微电机研发设计、生产制造的上市企业,产品涵盖微型步进电机、直流有刷电机、直流无刷电机、微型水泵等多种电机及相关组件;公司在国内微电机领域处于领先地位,是少数能够提供人形机器人核心零部件的企业之一;公司通过与华为等头部企业合作,进一步巩固了其在机器人产业链中的重要地位。
公司通过子公司鼎智科技和中科灵犀科技,布局人形机器人核心部件,涵盖电机、执行器、控制系统等。
长盛轴承:自润滑轴承龙头企业,机器人业务有望打造新增长点
2025年2月18日,长盛轴承(股票代码:300718)在披露的调研纪要中介绍,公司与宇树科技的合作正在有序推进中,已签订合作协议并取得了订单;合作的产品主要为应用于机器人关节处的自润滑轴承,该类产品已实现小批量的生产销售,在主营业务收入中占比低(不足1%)。
公司成立于1995年,公司已发展成为我国自润滑轴承领域龙头企业,产品涵盖金属塑料聚合物自润滑卷制轴承、双金属边界润滑卷制轴承、金属基自润滑轴承、非金属自润滑轴承、铜基边界润滑卷制轴承等,是国内自润滑轴承龙头企业。
2024年7月,长盛轴承就在投资者平台透露:公司目前正与多个机器人主机厂及相关供应商展开合作研发,其中包括宇树科技,主要针对的是滑动轴承在关节处的应用;宇树科技是国内领先的人形机器人主机厂之一,公司有望借此合作加速开拓机器人滑轴新业务。

此外,公司积极拓展丝杠等新产品,可应用于数控机床、汽车、人形机器人等行业;公司目前滚珠丝杠产品在汽车领域已实现量产,未来伴随汽车市场的开拓与人形机器人产业发展,丝杠业务有望成为新的亮点业务。
北特科技(股票代码:603009):
据相关信息,北特科技(股票代码:603009)已宇树科技开展人形机器人用丝杠产品的研发工作,并投资建设了相应的小批量产线;目前,这些产品尚处于样件阶段,目前双方都没有发布相关声明。
公司成立于2002年,是一家专注于汽车零部件研发、生产和销售的高新技术企业;2023年,公司抓住人形机器人产业机遇,开始研发和小批量生产人形机器人用丝杠产品,包括行星滚柱丝杠和梯形丝杠。2024年,公司设立全资子公司“上海北特机器人部件有限公司”,进一步拓展机器人零部件业务
... ... ...
本文内容仅展示一部分,更多详细解读,加入知识星球“机器人头条”,查看完整版文章:[宇树科技]深度解析及13家核心零部件供应商梳理,并深度了解“具身智能&人形机器人”赛道


















 512
512

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









