






机械臂视觉抓取仿真,vrep与matlab联合仿真示例,仅供学习
matlab端通过GUI控制机械臂抓不同的物体,在matlab端有简单的图像处理算法,未优化,可以自己改进。
基础太差的勿用
ID:52199628409277368
Huyoust
机械臂视觉抓取仿真,vrep与matlab联合仿真示例,仅供学习
在机器人领域,机械臂的视觉抓取是一个重要的研究方向。通过机械臂的视觉系统,实现对不同物体的抓取和操控已经成为实际应用的需求。为了满足这一需求,众多的仿真工具和软件被开发出来,并且得到了广泛的研究和应用。
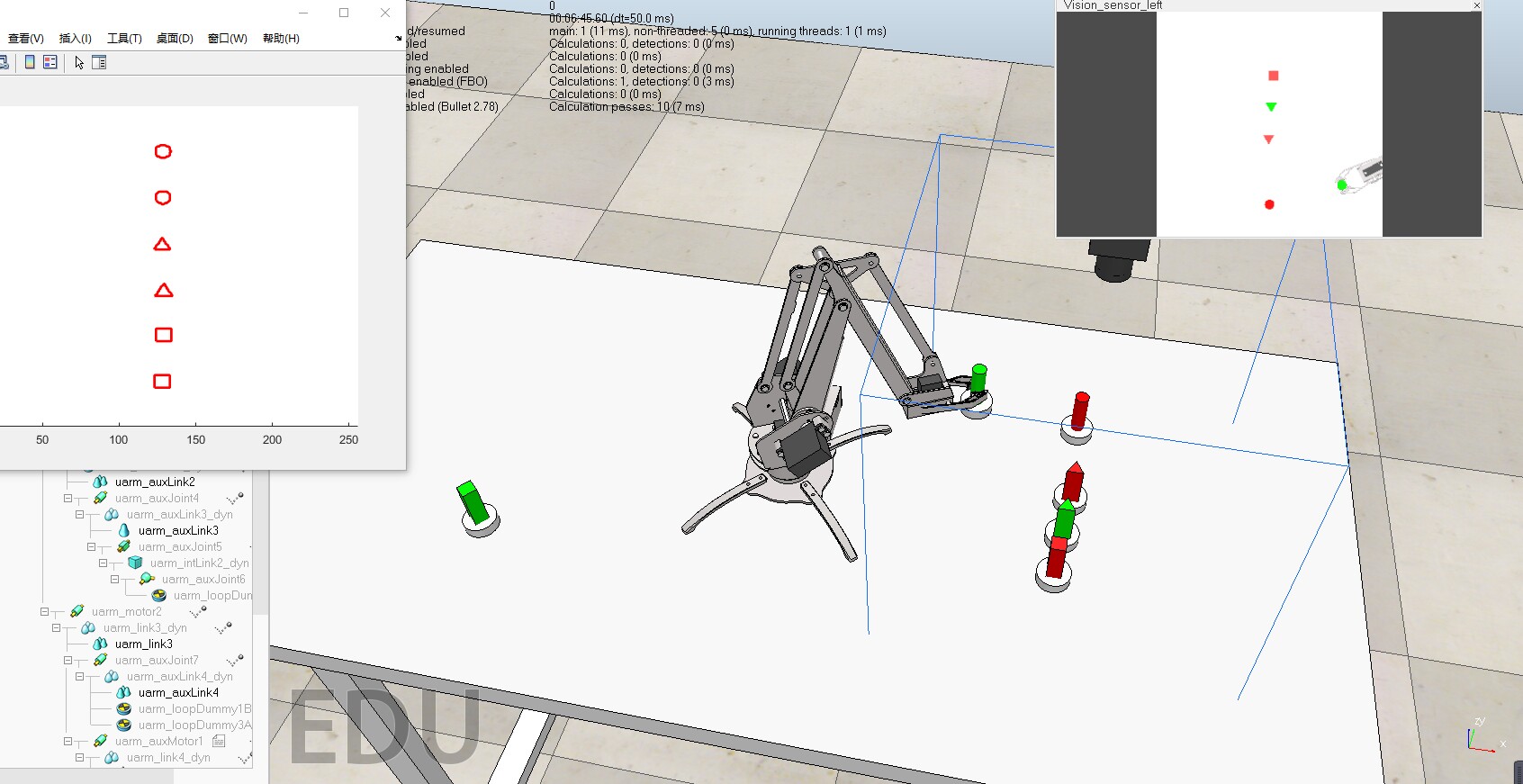
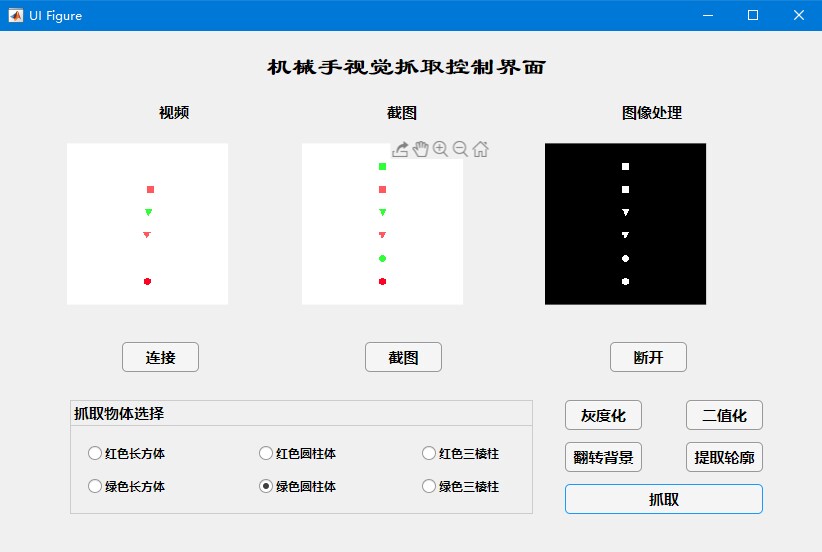
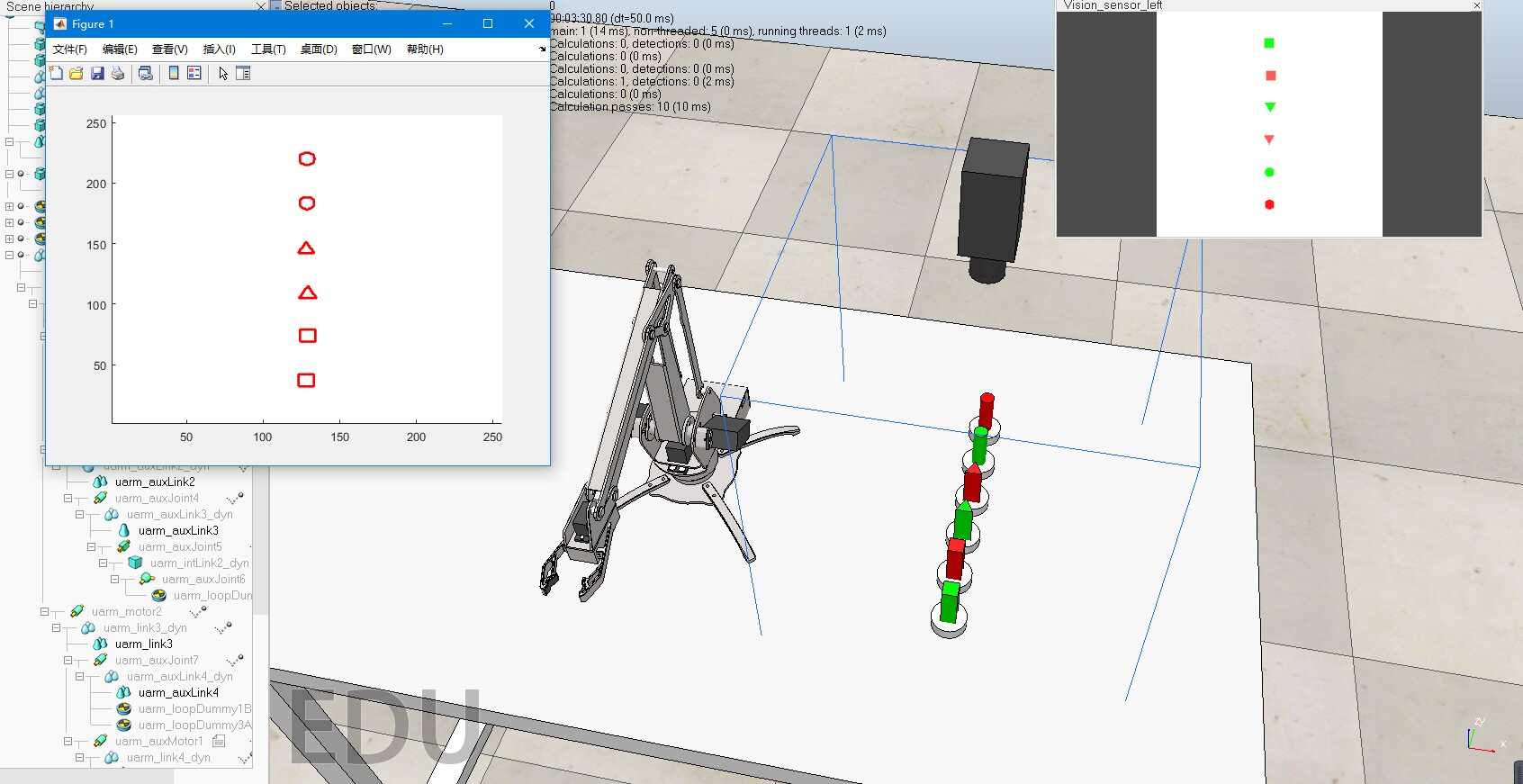
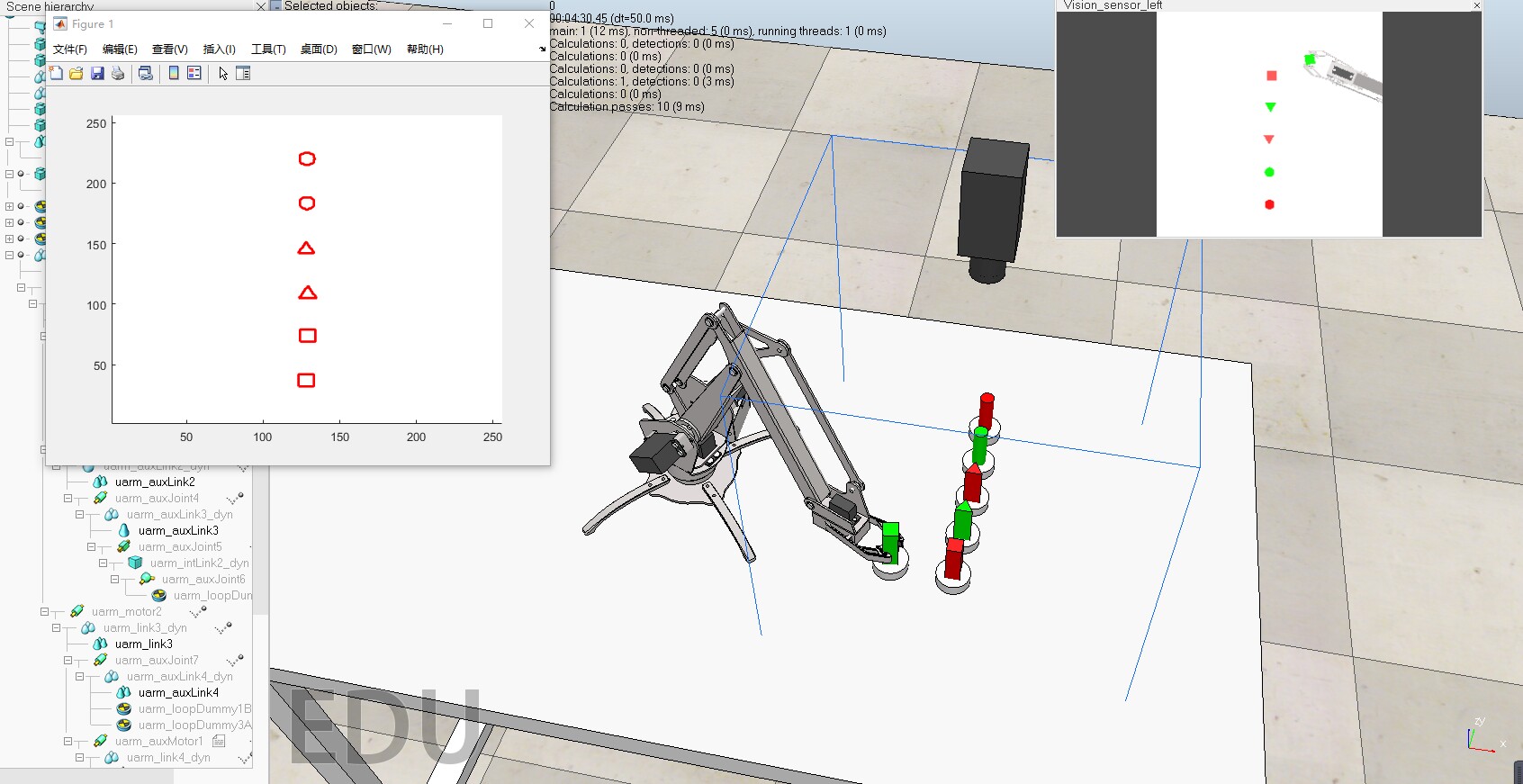
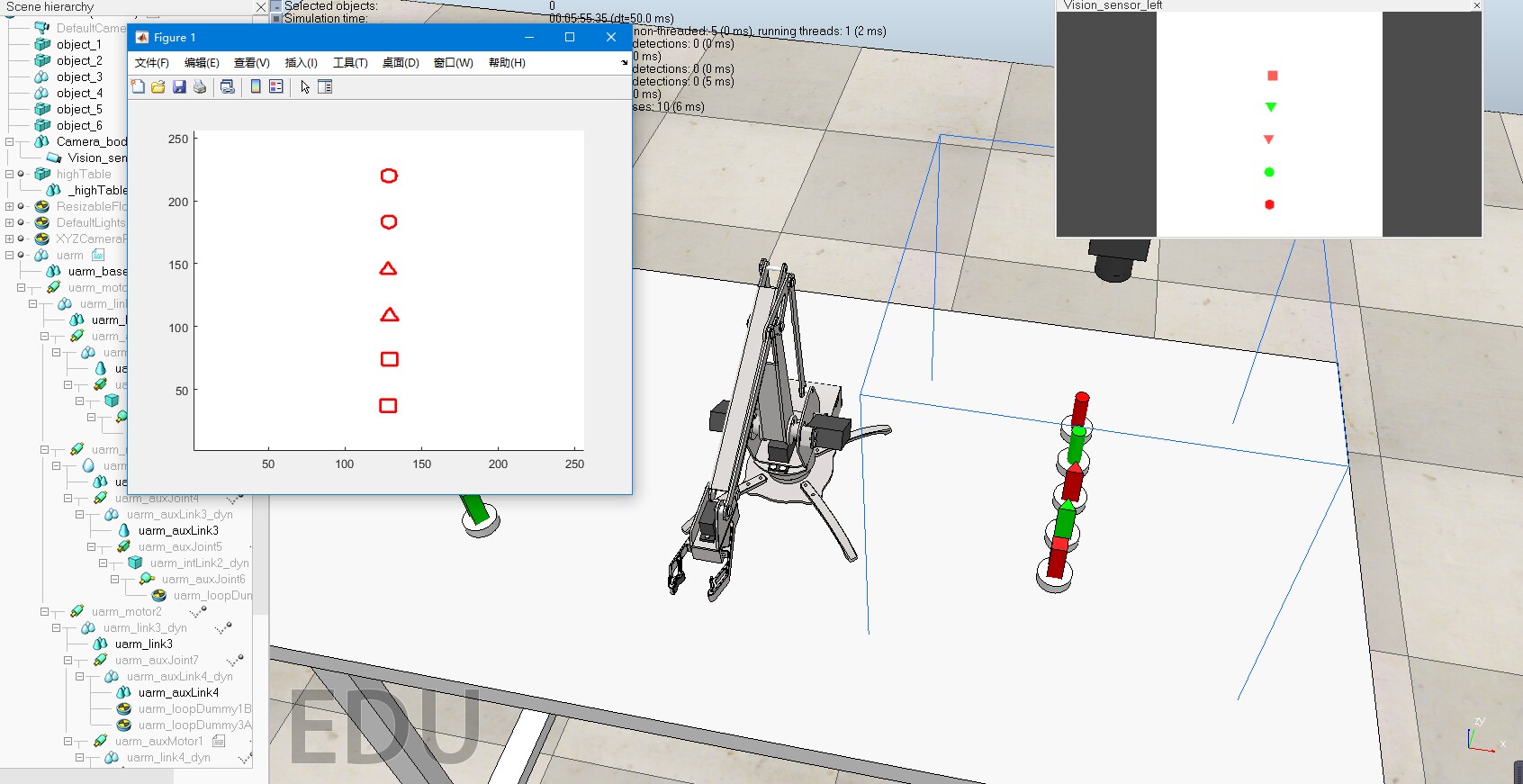
本文主要介绍了一个机械臂视觉抓取仿真的示例,该示例是由vrep与matlab联合开发实现的。通过在matlab端编写GUI控制程序,用户可以对机械臂进行抓取物体的控制。在matlab端还包含了一些简单的图像处理算法,用于识别和定位不同的物体。需要注意的是,这些图像处理算法并没有进行优化,用户可以根据自己的需求进行改进和优化。
对于初学者而言,掌握基本的机械臂操作和图像处理知识是非常重要的。机械臂的运动控制涉及到编码器读取、运动规划、逆运动学等方面的知识,而图像处理则需要了解常用的算法和工具。因此,如果基础不太牢固的话,建议不要使用该示例,以免造成困惑和误解。
在该示例中,vrep被用作机械臂的仿真平台。vrep是一个功能强大且灵活的机器人仿真工具,可以模拟各种机器人和环境。通过在vrep中建立机械臂模型和场景,用户可以进行真实的机械臂操作和视觉感知。
在matlab端,用户可以通过GUI控件对机械臂进行控制。GUI控件通常包括按钮、滑块、文本框等,用户可以通过这些控件设置机械臂的姿态、抓取力度、目标物体等参数。这些参数会传递给vrep,从而实现对机械臂的远程控制。
除了控制机械臂的姿态和抓取力度,图像处理算法也是该示例的重要组成部分。在matlab端,用户可以使用一些简单的图像处理算法来识别和定位目标物体。例如,常见的算法有颜色识别、形状匹配、特征提取等。这些算法可以在matlab端进行原型设计和实验,然后再应用到实际的机械臂控制中。
需要强调的是,该示例中的图像处理算法并没有进行优化。这意味着用户可以根据自己的需求进行改进和优化。例如,可以引入更复杂的算法、使用机器学习方法,或者结合深度学习技术进行物体检测和识别。
总之,机械臂视觉抓取仿真是一个复杂而又重要的研究方向。通过vrep与matlab的联合仿真,用户可以实现对机械臂的远程控制和视觉感知。然而,由于涉及到较多的知识和技术,建议具备一定的机器人和图像处理基础的用户使用。对于初学者而言,可以先掌握基本的机械臂操作和图像处理知识,然后再尝试使用该示例进行深入研究和实践。
希望本文对于机械臂视觉抓取仿真的学习和研究能够起到一定的帮助和指导作用。如果读者在实践中遇到问题或者有更好的优化方案,欢迎进行讨论和交流。通过共同的努力和学习,相信机械臂视觉抓取仿真的研究会有更加广阔的发展前景。
相关的代码,程序地址如下:http://imgcs.cn/628409277368.html
















 266
266

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









