






stm32f405 FOC方波高频注入无感FOC驱动资料,零速带载启动,低速持续注入,实现无感驱动低速运行,堵转有力。
高频注入零速启动三步走
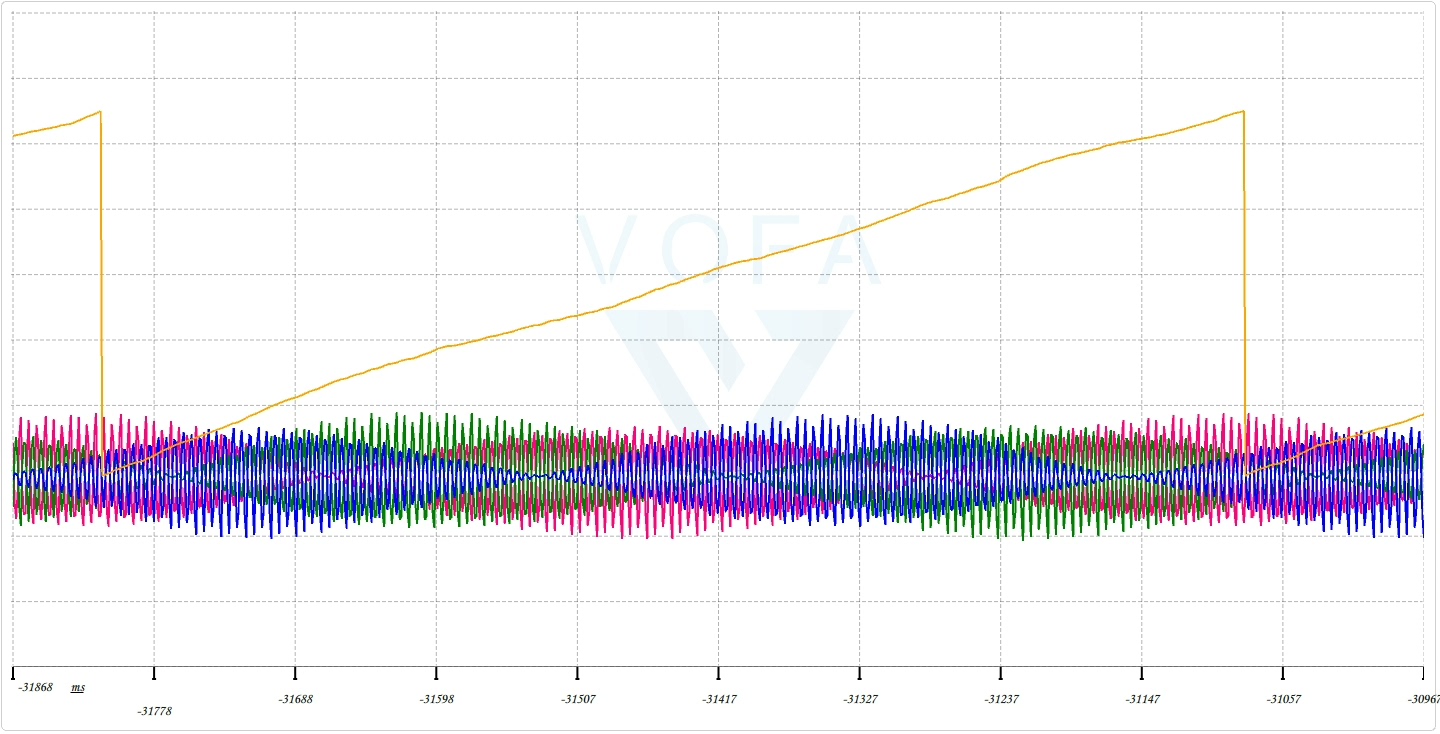
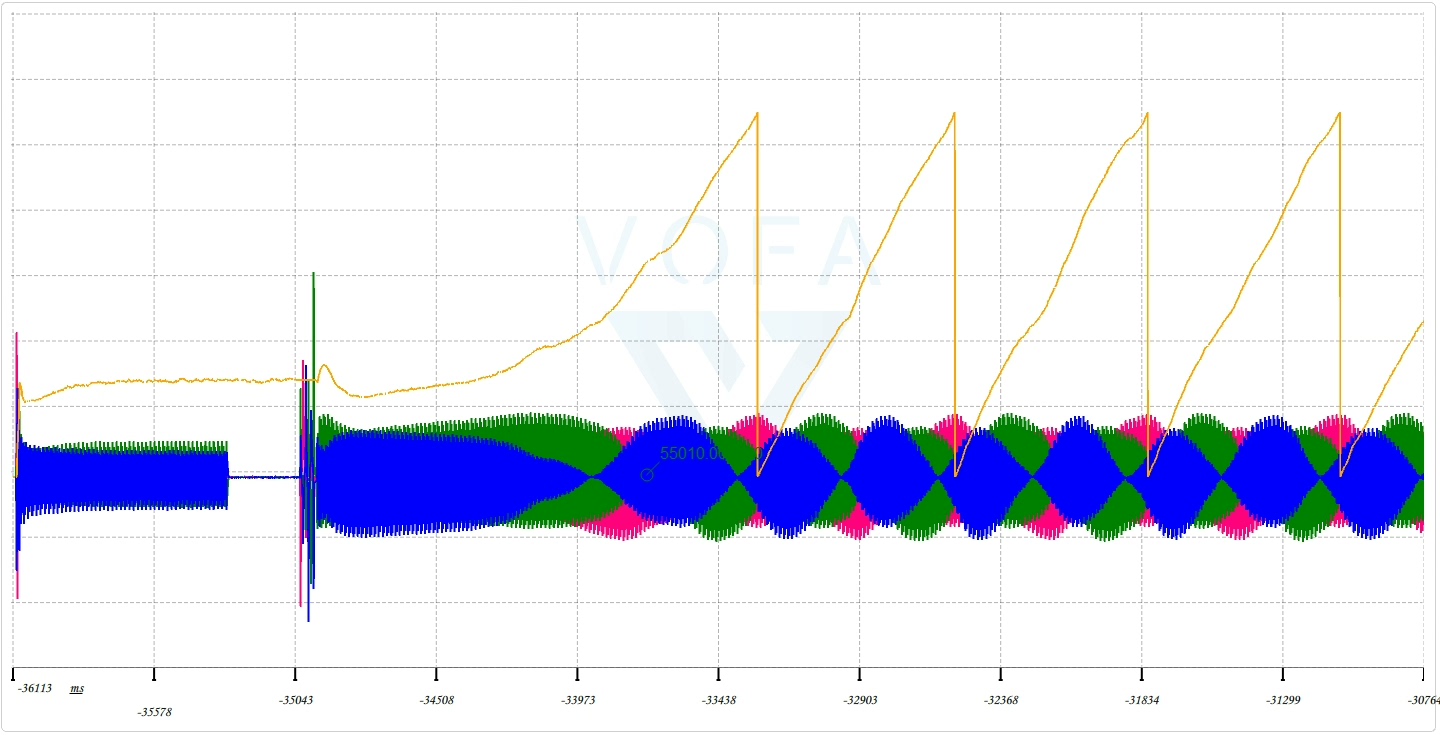
1.先是高频注入,角度估算收敛。
2.脉冲NS磁极辨识。
3.角度,速度双闭环零速启动运行。
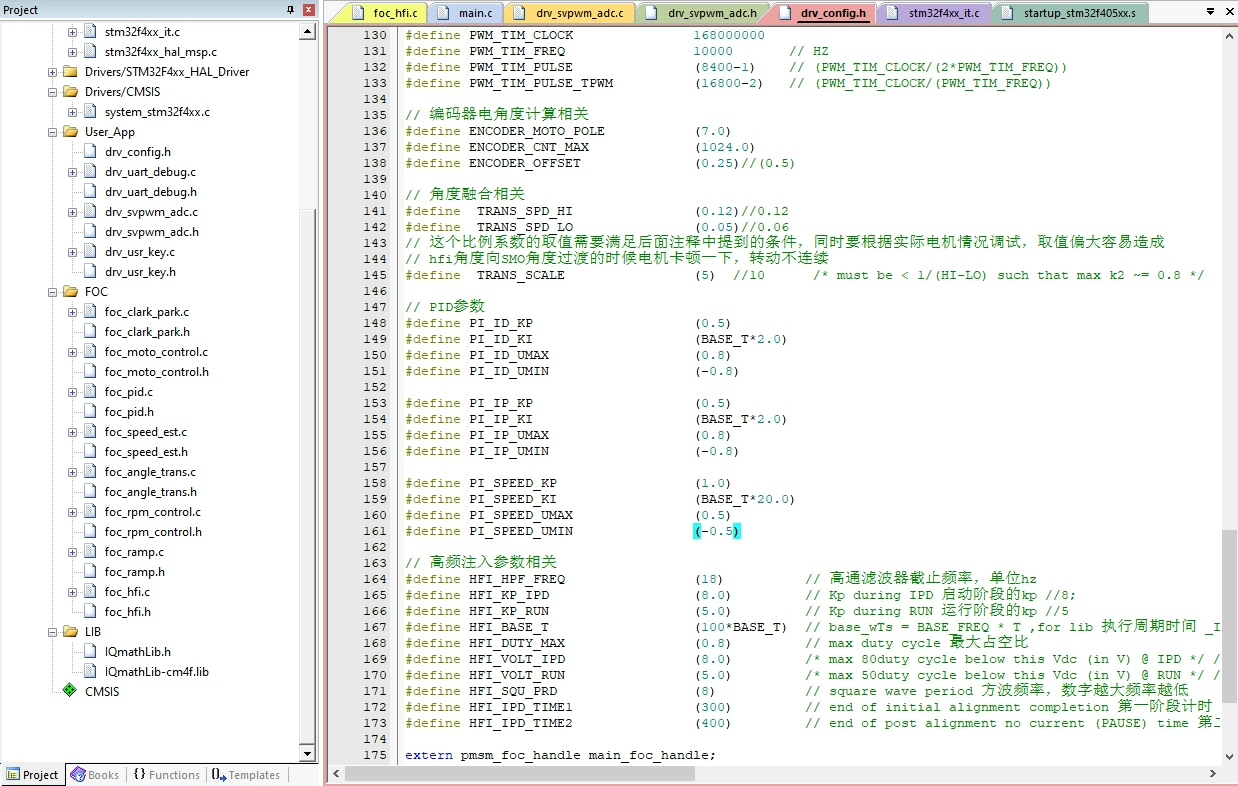
包括完整的cubemx配置文件,mdk工程,原理图和开发笔记,代码全C语言,宏定义选项均有中文注释,方便移植到自己的项目中。
。
ID:89400737538918910
鸭梨山大达
stm32f405 FOC方波高频注入无感FOC驱动技术分析
引言:
随着电机控制技术的不断发展,无感FOC(Field-Oriented Control)驱动方式在工业控制领域得到了广泛应用。在电机低速启动以及堵转有力等特殊情况下,高频注入技术被引入,使得无感驱动在这些场景下仍能稳定运行。本文将围绕stm32f405芯片的FOC方波高频注入无感FOC驱动技术进行深入的分析和讨论。
一、高频注入零速启动三步走
为了实现无感驱动在低速运行和堵转有力的情况下的启动,采用了高频注入零速启动三步走的策略。
-
高频注入与角度估算收敛
通过高频注入的方式,将电流注入到电机绕组中,从而改变电机绕组的阻抗特性。通过对注入的电流进行观测和分析,可以得到电机的阻抗特征,进而估算出电机的转子位置和角度。 -
脉冲NS磁极辨识
在高频注入的基础上,通过观测得到的电机阻抗特征,可以进一步判断电机的磁极位置。 -
角度、速度双闭环零速启动运行
通过前两步的分析和估算,得到电机的转子角度和位置信息。在启动阶段,通过控制器的角度和速度双闭环控制策略,实现电机在零速下的启动和运行。
二、技术实现
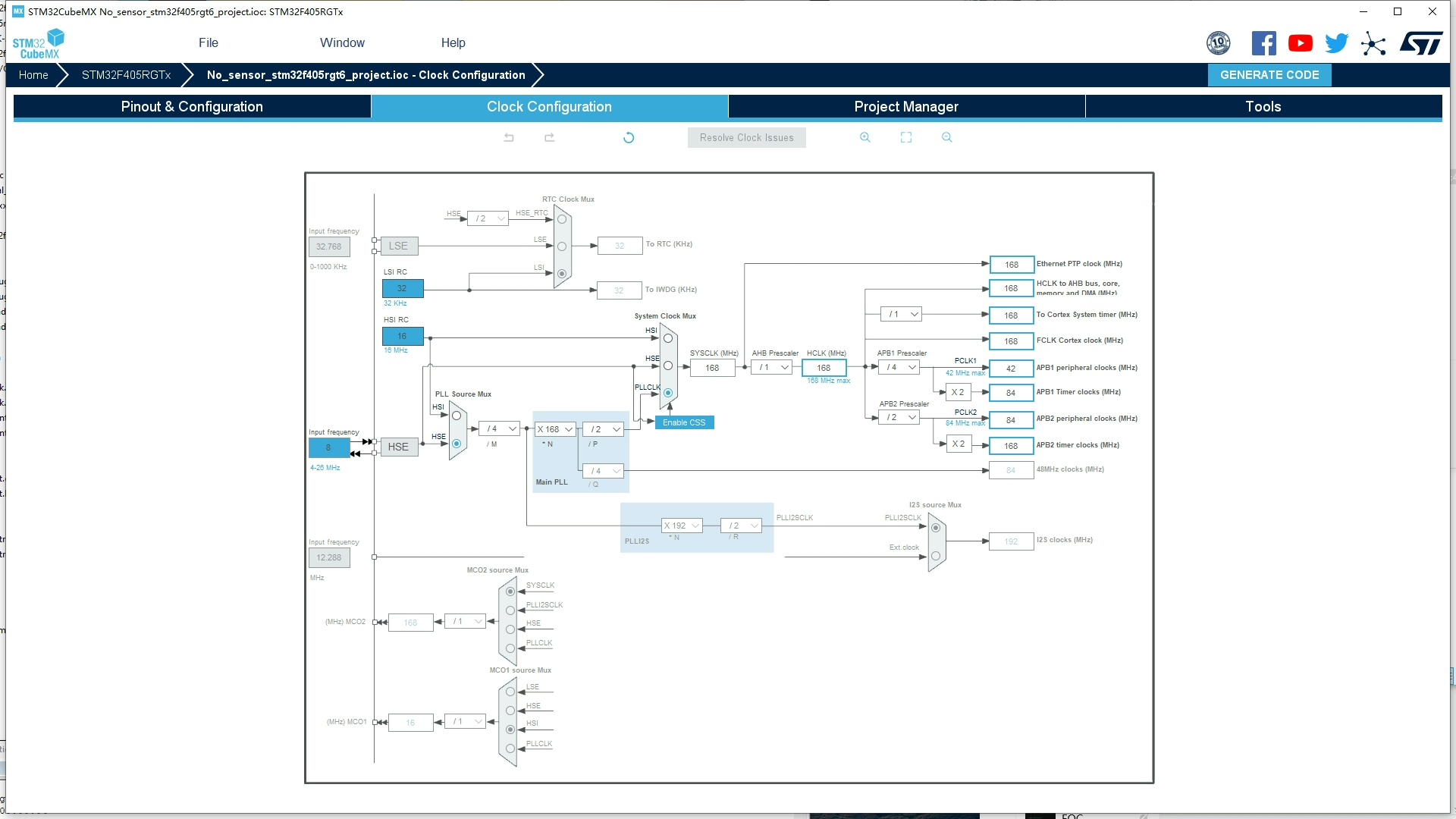
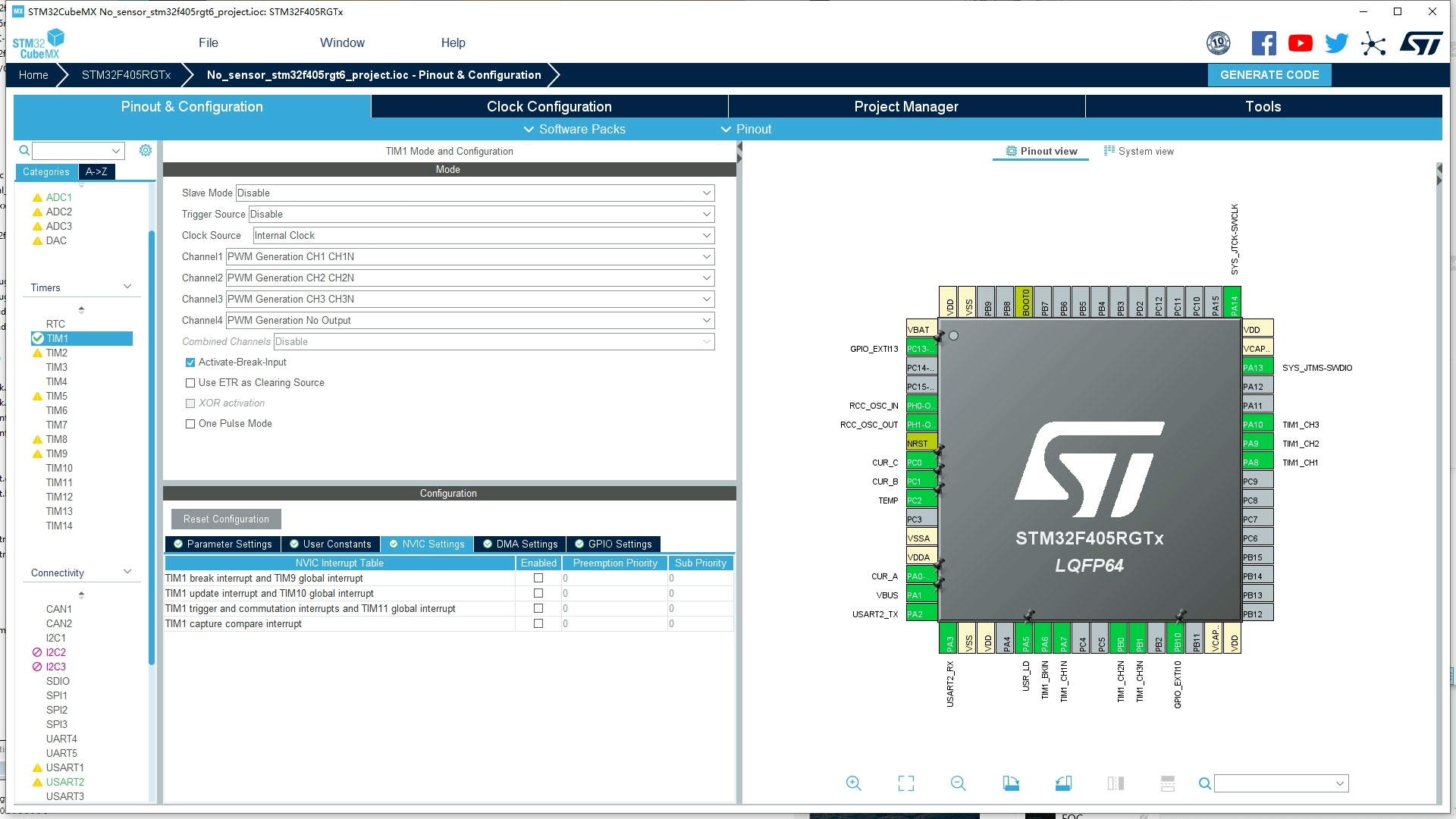
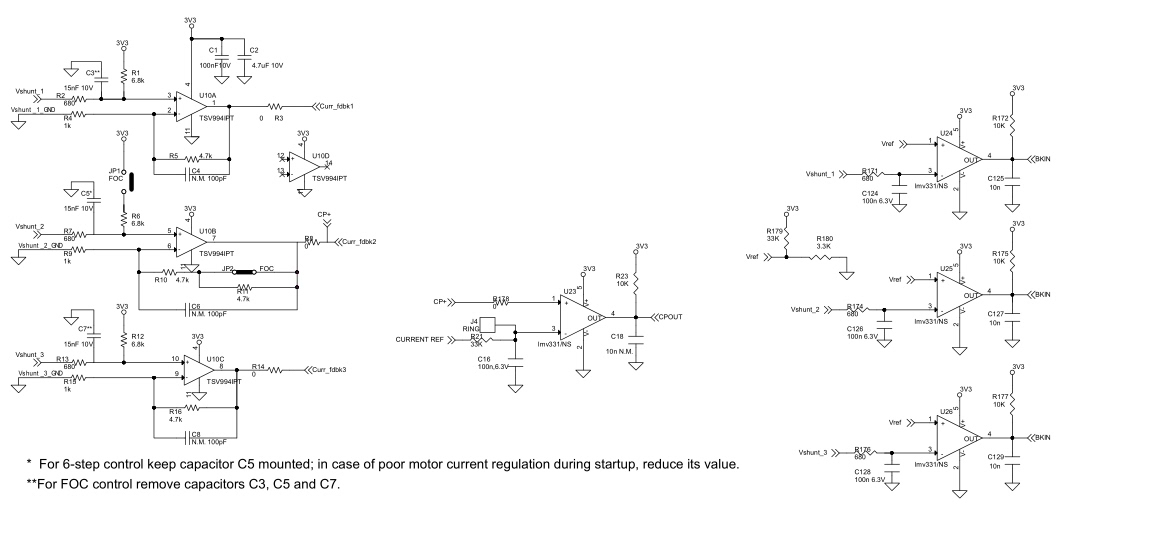
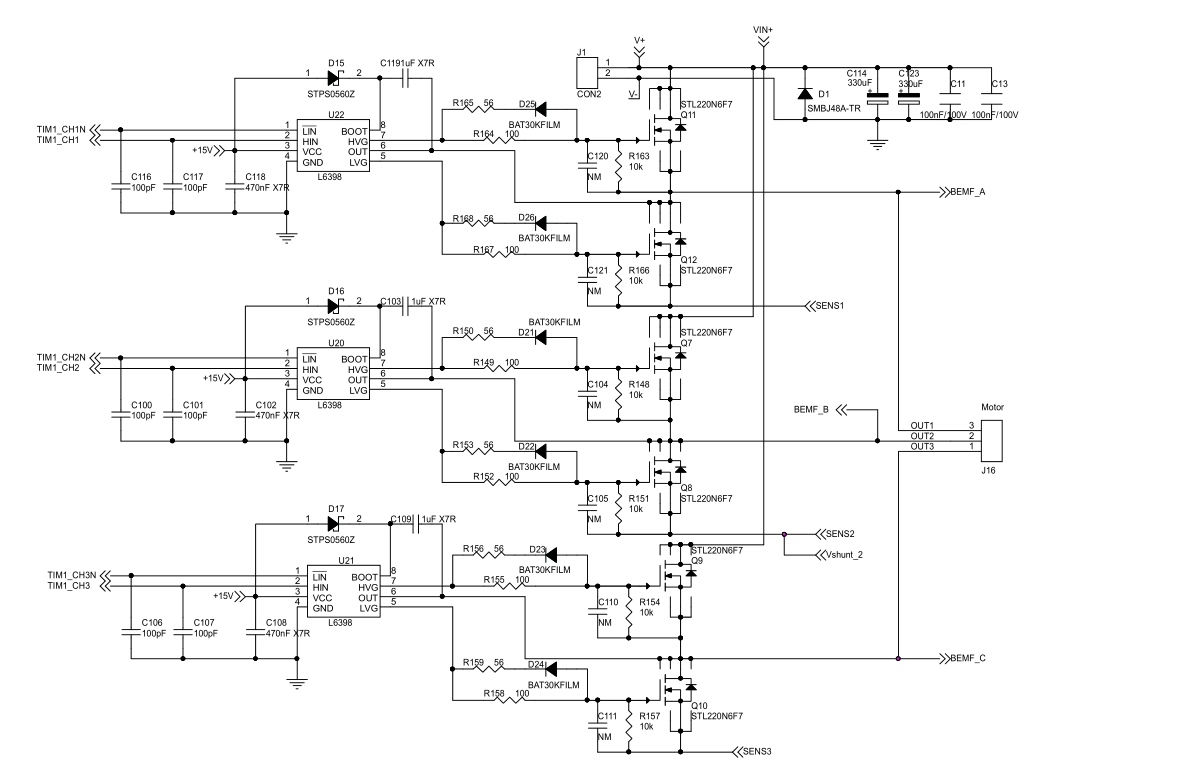
为了帮助读者更好地理解和应用该技术,本文提供了完整的技术资料,包括cubemx配置文件、mdk工程、原理图和开发笔记。所提供的代码全为C语言编写,并且每个宏定义选项均有中文注释,方便读者将其移植到自己的项目中。
三、学习资料及定制开发
本文提供的技术资料只用于学习目的,一旦售出概不退换。对于有特定需求的读者,我们也提供代客画板或者定制开发服务,如果您有相关需求,欢迎详细咨询。
结论:
通过对stm32f405芯片的FOC方波高频注入无感FOC驱动技术进行详细的分析和讨论,我们可以看到该技术在电机低速启动和堵转有力等特殊情况下具有良好的应用前景。通过高频注入、角度估算和双闭环控制等关键步骤,实现了对电机的精确控制和稳定运行。同时,本文还提供了相关技术资料和定制开发服务,为读者提供了更多的学习和应用资源。
(备注:本文旨在对FOC方波高频注入无感FOC驱动技术进行分析和讨论,对于具体实施细节,请参考相关资料和文献。)
相关代码 程序地址:http://nodep.cn/737538918910.html















 626
626











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









