






入门指南
本指南介绍了如何连接和配置运行 ArduPilot 的自动驾驶仪硬件以与 Septentrio 接收器配合使用。
硬件设置
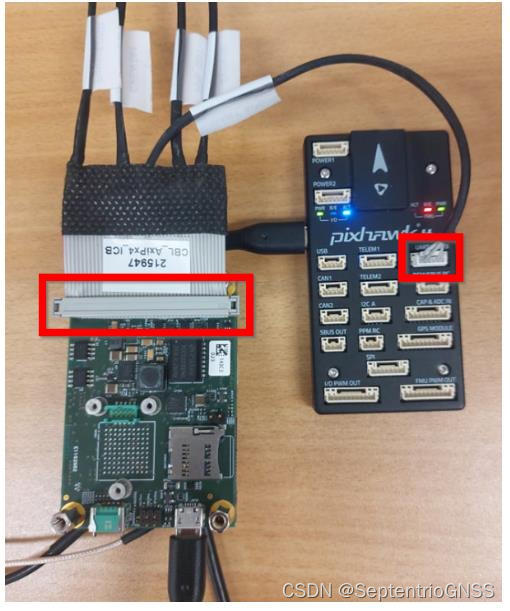
| Pixhawk 4和马赛克Go | Pixhawk 4和 RIB 板 |
|---|---|
|
|
|

- 使用 USB 连接器或来自自动驾驶仪连接的电源为接收器提供至少 5V 的电源
- 将一根或两根 GNSS 天线连接到接收器上的“RF-IN”端口
- 将接收器连接到自动驾驶仪硬件,如上图所示
- 在 Web 界面或使用 Rx Tools 中,确保接收器的波特率设置为 115200 管理 > 专家控制 > 控制面板 > 通信 > COM 端口设置(这是默认值)。
使用mosaic-go时,请确保JST电缆接线正确,因为它不是标准电缆。下面是接线图。

网页应用程序
马赛克-H GPS/GNSS 接收器模块带有航向,配有完整记录的接口、命令和数据消息。随附的 GNSS 接收器控制和分析软件 RxTools允许接收器配置、监控以及数据记录和分析。
接收器包括直观的网络用户界面,可轻松操作和监控,使您可以从任何移动设备或计算机控制接收器。网络界面还使用易于阅读的质量指示器,非常适合在手头的工作中监控接收器的操作。

带有使用 RIB 接口的Septentrio 接收器的 Pixhawk 4
以下步骤详细介绍了如何使用机器人接口板 (RIB)将Pixhawk 4与最新一代AsteRx GNSS 和 INS 接收器集成。在此示例中,设置是在实验室环境中使用带有 RIB 的 AsteRx-m3 D 接收器完成的,而无需将其安装在实际的 UAS(无人机系统)上。请注意,AsteRx-i3 S 和 AsteRx-m3 接收器(带 RIB 套件)的程序相同。
集成需要以下内容:
- 安装了Mission Planner的运行 Windows 的笔记本电脑或 PC
- AsteRx GNSS OEM 接收器
- 像素鹰 4
- 双频 GNSS 天线
- 用于与 MMCX 连接器连接的适配器和电缆
- 2 * 微型 USB 数据线
集成包括以下步骤:
步骤1:
确保接收器的供电电压至少为 5V。您可以使用微型 USB 连接器或开放式电源(标记为“PWR & GND”)。
第2步:
将一根或两根 GNSS 天线连接到AsteRx接收器板上的外部天线端口,如图 1 所示。

步骤3:
现在将AsteRx接收器连接到Pixhawk 4上的 GPS 模块端口,如图 2 和图 3 所示,具体取决于您的接收器。


电缆应如图 4 所示接线。
步骤4:
在 Windows 笔记本电脑/PC 上,从 Ardupilot 网站下载并安装Mission Planner 。Pixhawk 4的驱动程序将与Mission Planner软件一起安装。
第5步:
下载固件
从此存储库中的版本中,下载与您的设置相对应的资产(通常是 .apj 文件)。(要为特定目标板构建代码,请下载源代码并按照 ArduPilot 文档中的说明进行操作)。
将飞控连接至电脑
在计算机上安装地面站后,使用 micro USB 电缆连接自动驾驶仪。
选择COM端口
如果使用Mission Planner作为 GCS,请选择窗口右上角“连接”按钮附近的 COM 端口下拉列表。选择 AUTO 或您的主板的特定端口。将波特率设置为 115200,如图所示。暂时不要点击“连接”。

安装固件
在任务规划器的设置中 | 安装固件屏幕单击“加载自定义固件”并选择 .apj 文件。
任务规划器将尝试检测您正在使用哪个板。它可能会要求您拔下开发板,按“确定”,然后重新插入以检测开发板类型。
如果一切顺利,您将看到右下角出现状态,包括以下文字:“擦除...”、“编程...”、“验证..”和“上传完成”。固件已成功上传至开发板。
编程或上电后,引导加载程序通常需要几秒钟的时间退出并进入主代码。等待按 CONNECT,直到出现这种情况。
第6步:
在Mission Planner中,选择Pixhawk 4对应的端口(如图 3 所示),然后单击“连接”(请注意,不同连接的端口枚举会有所不同)。确保波特率与接收器的波特率相匹配,默认波特率为 115200 波特率。
第7步:
成功连接到Pixhawk 4后,选择顶部的“CONFIG”选项卡并打开完整参数列表(图 4 左侧突出显示)。现在搜索“GPS_TYPE2”并将其值设置为10以选择SBF作为传入数据格式,它将选择AsteRx接收器作为第二个GPS,如图4所示。

另请确保“SERIAL4_BAUD”参数设置为 115,并且“SERIAL4_PROTOCOL”配置为 GPS 值 5,如图 5 所示。

最后,您还可以通过将“GPS_AUTO_CONFIG”设置为0来关闭Ardupilot自动配置,如下所示。

双天线额外参数
对于双天线设置,除了单天线设置的设置外,还需修改以下设置:
- 如果系统中也有罗盘,则EK3_SRC1_YAW = 2(“GPS”)或 3(“带罗盘回退功能的 GPS”)
- GPS_TYPE = 26(SBF-航向)
SBF 航向参数可能不会显示在地面控制站中。手动输入参数仍然有效。此问题将在Mission Planner的未来版本中得到解决。
应用上述所有设置后,单击“写入参数”(位于上图中屏幕的右侧)将设置保存到内存中。
步骤8:
现在Pixhawk 4应该能够通过接收器的串行COM2端口接收SBF数据。在“飞行数据”屏幕上,现在应显示 GPS2 状态以及地图上的位置指示器。在这种情况下,屏幕报告 3D Fix for GPS2 以指示独立解决方案,如图 9 所示。

要了解有关使用Mission Planner注入 RTK 校正的更多信息,请参阅 本文。
步骤 9(仅适用于双天线设置)
姿态(航向/俯仰)可以根据主天线和 aux1 GNSS 天线之间的基线方向来计算。

要启用多天线姿态确定,请按照以下步骤操作:
- 使用长度大致相同的电缆将两根天线连接到您的车辆上。默认天线配置如图所示。它包括将天线与车辆的纵轴对齐,主天线位于 aux1 后面。为了获得最佳精度,请尝试最大化天线之间的距离,并避免天线 ARP 之间存在显着的高度差异。
- 实际上,两个天线 ARP 在车架中可能不完全处于同一高度,或者 main-aux1 基线可能不完全平行或垂直于车辆的纵轴。这会导致计算出的姿态角发生偏移。这些偏移可以使用setAttitudeOffset命令进行补偿。
为了获得最佳航向结果,两个天线应间隔至少 30 厘米/11.8 英寸(理想情况下为 50 厘米/19.7 英寸或更多)















 659
659

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









