






 雄克的五指机械手系列具备高精度抓取能力,其9个驱动器的指骨设计能模拟人手动作。内置电子装置集成于腕关节,实现低能耗且适用于移动应用。这款机械手提供左右手版本,通过标准接口兼容各类工业和轻型机器人,开启了新的抓取任务及人机交互可能性。
雄克的五指机械手系列具备高精度抓取能力,其9个驱动器的指骨设计能模拟人手动作。内置电子装置集成于腕关节,实现低能耗且适用于移动应用。这款机械手提供左右手版本,通过标准接口兼容各类工业和轻型机器人,开启了新的抓取任务及人机交互可能性。
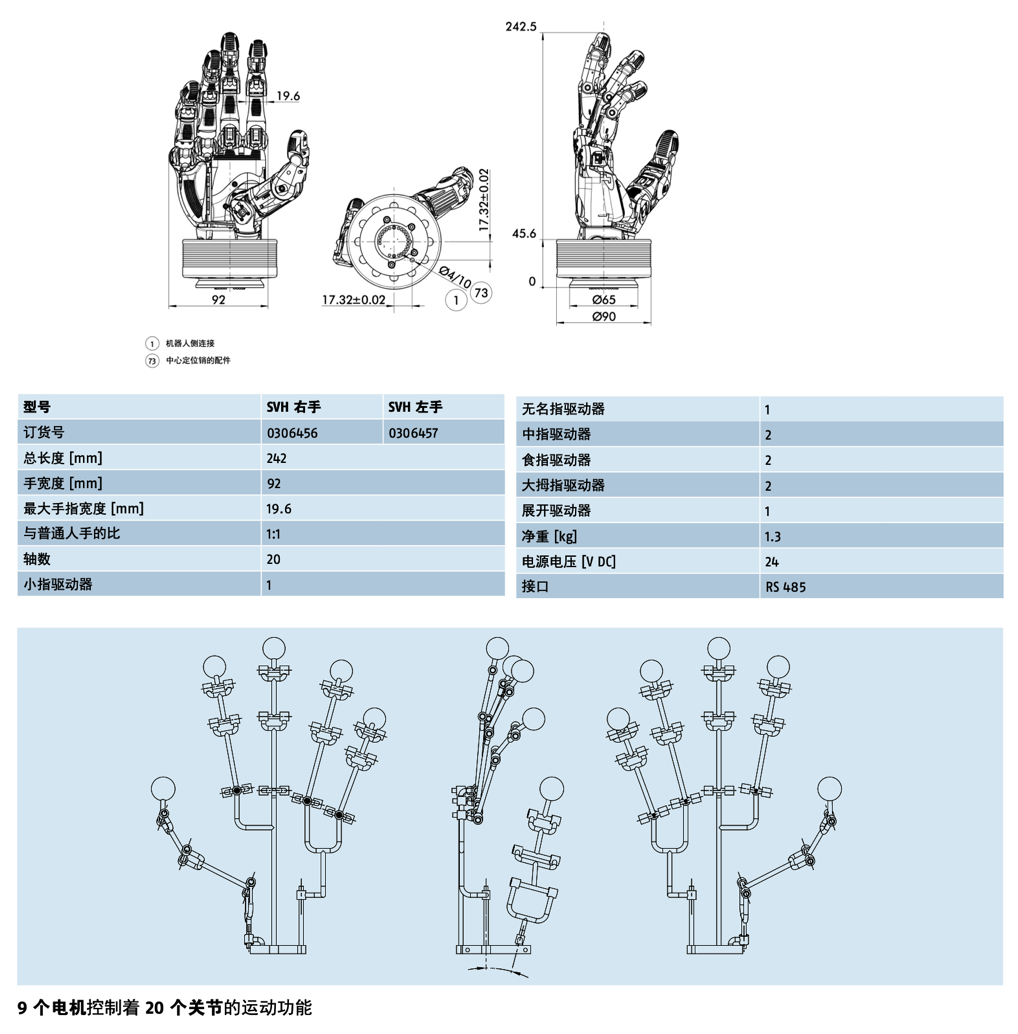
雄克仿真五指机械手产品系列可以如人手操作那般完美地完成抓取操作。电子装置完全集成于腕关节中,使五指机械手几乎可以完成所有的人体手部动作。
凭借带有9个驱动器的运动指骨,机械手可高精度地 执行多种抓取操作。富有弹性的抓取表面确保了对物体的可靠抓取。除了开启抓取和操作任务的全新领域之外,雄克还为在五指机械手的手势基础上进行人与机器人的交流开创了无限可能。

编辑切换为居中
添加图片注释,不超过 140 字(可选)
产品特点:
机械手有左手或右手两种版本
适合移动应用
耗能低,使用 24 V DC 在腕关节处完整集成了控制、调节器和电源电子元件
通过定义的接口可轻松连接市场中标准的工业机器人和轻型机器人
编辑切换为居中
添加图片注释,不超过 140 字(可选)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









