






Apollo规划模块学习
文章目录
一、规划的作用
规划:在遵循道路交通规则的前提下,将自动驾驶车辆从当前位置导航到目的地。
1.1 规划的主要功能
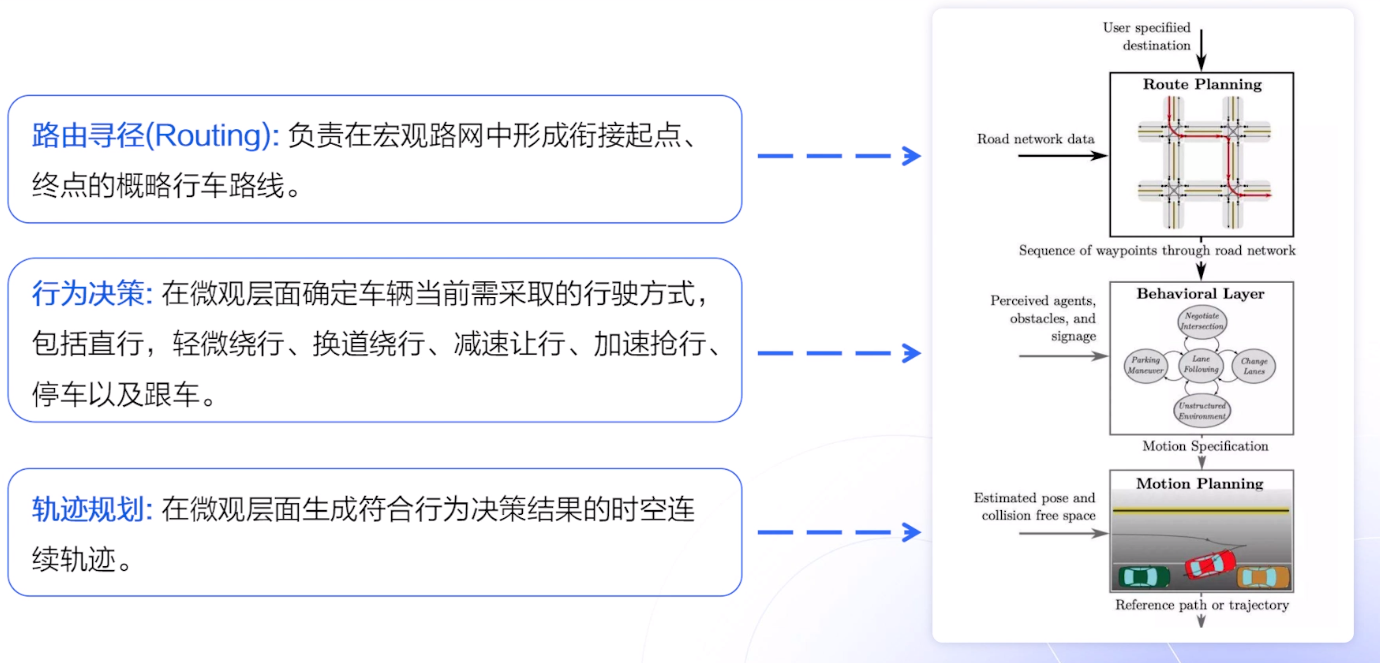
1、路由寻径(Routing):负责在宏观路网中形成衔接起点、终点的概略行车路线。
2、行为决策:在微观层面确定车辆当前需采取的行驶方式,包括直行,轻微绕行、换道绕行、减速让行、加速抢行、停车以及跟车。
3、轨迹规划:在微观层面生成符合行为决策结果的时空连续轨迹。
1.1.1 路由寻径
目的:在地图上搜索出最优的全局路径
输入:高精地图拓扑信息;起点和终点的位置
输出:从起点到终点的路由线路
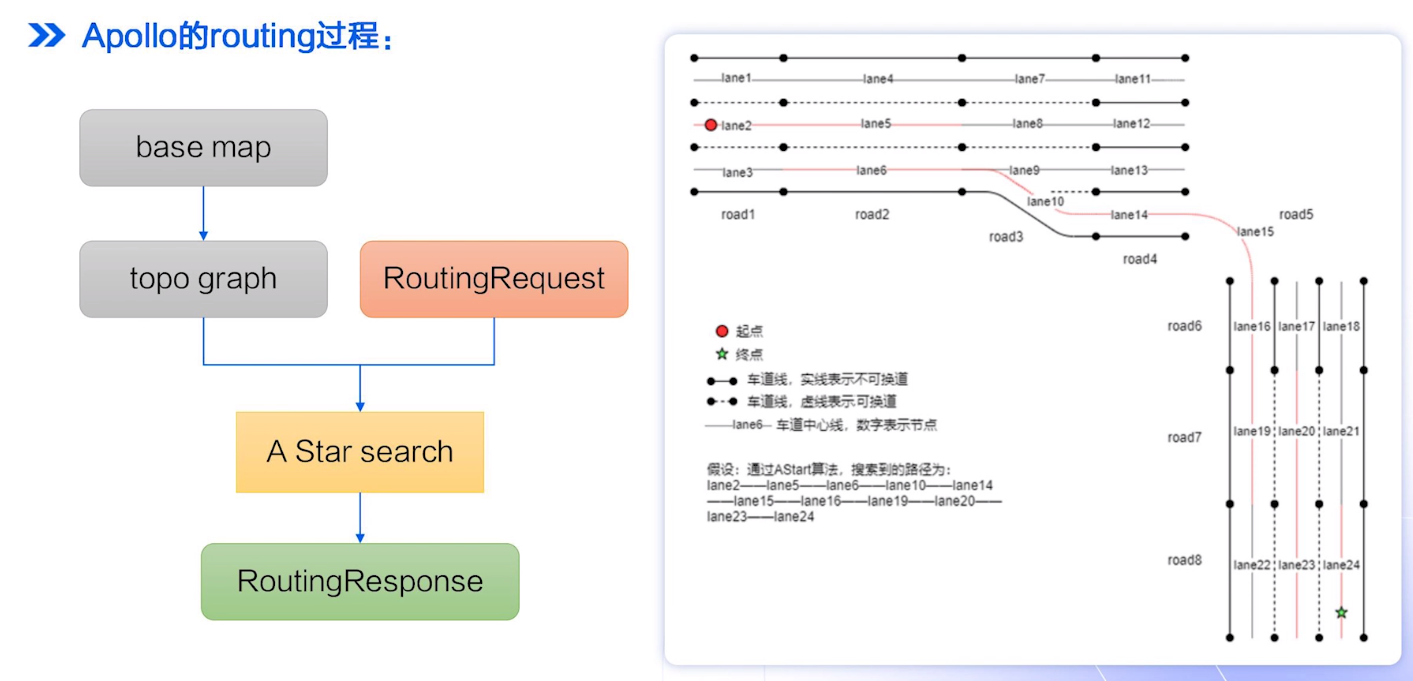
路由寻径的地图格式:Topo Graph = 节点 + 边缘
节点表示实际的道路路段;边缘表示路段之间的连接线,可赋予不同的代价值
路径搜索算法:A*算法
Apollo的Routing过程:
1.1.2 行为决策
目的:
保障无人车的行车安全并遵守交通规则;
为路径和速度的平滑优化提供限制信息
输入:
Routing信息;
道路结构信息(如:当前车道、相邻车道、汇入车道、路口等);
交通信号和标识(如:红绿灯、人行横道、停车标志等);
障碍物信息(障碍物类型、大小、位置、速度、未来的可能运动轨迹)
输出:
路径信息(路径长度、左右限制边界);
速度限制和边界;
时间上的位置限制边界
行为决策模型:
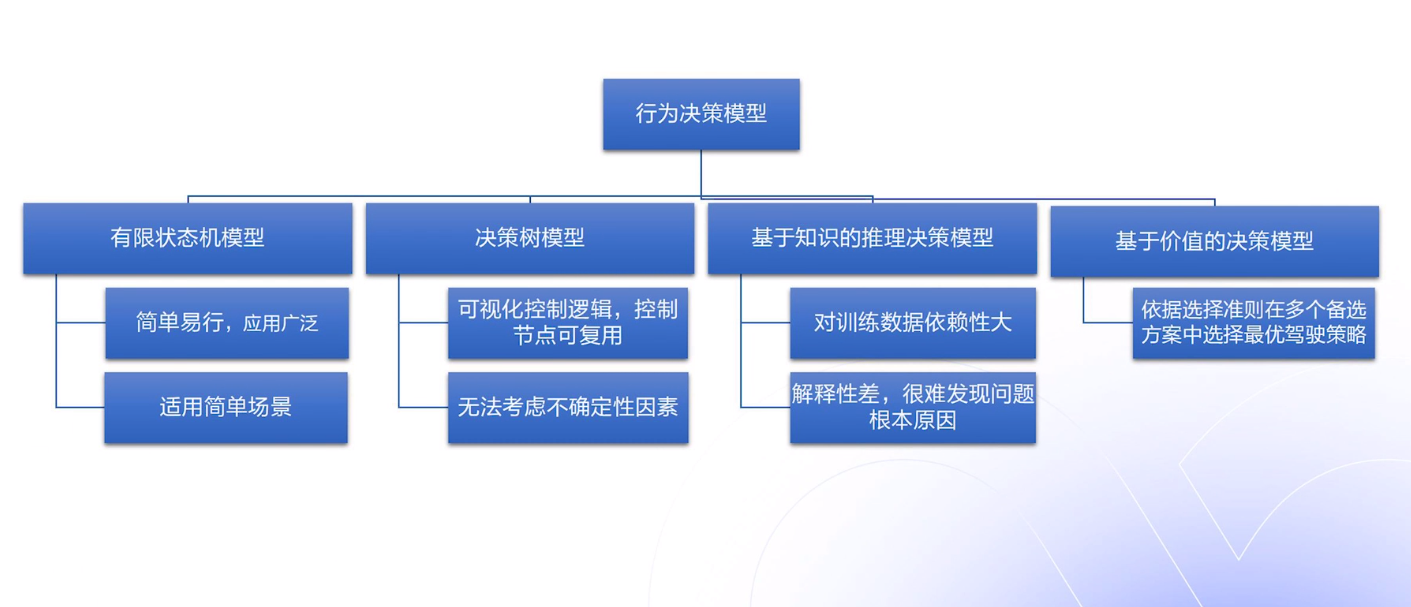
Apollo中的行为决策采用有限状态机模型
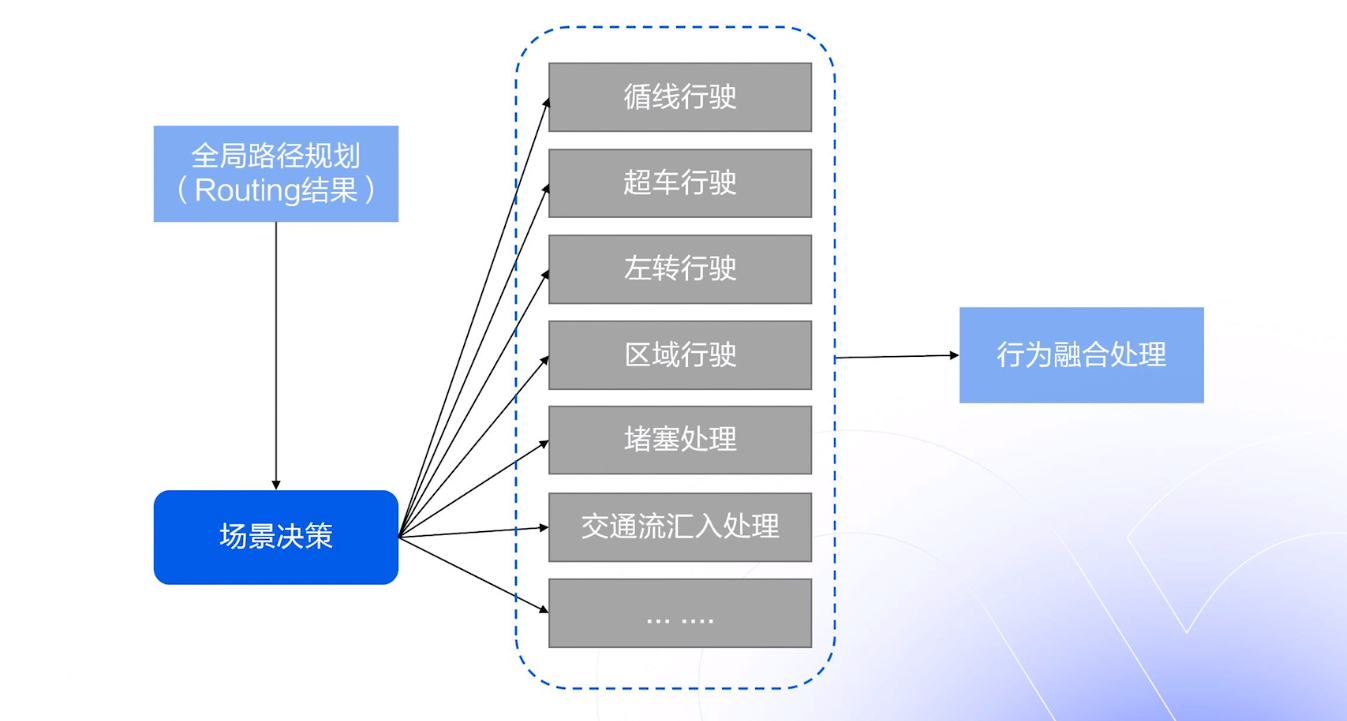
行为决策的主要决策类型:
1.1.3 轨迹规划
目的:
在合理的时间到达规划的目标或终点;
避免与障碍物碰撞;
更好的乘坐体验
输入:
决策输出信息;
道路结构信息;
交通信号和标识;
障碍物信息
输出:
稳定平滑的轨迹点(包含点的位姿、时间信息)
轨迹组成:由一系列位置点和到达点对应的时间戳组成 (x,y,t)
轨迹评估指标:无碰撞、舒适性、可执行
轨迹评估成本函数:轨迹的成本有各种处罚规则组成,如偏离道路中心、有可能发生碰撞、加速度或曲率水平
二、Apollo规划模块解析
Apollo系统整体模块框架
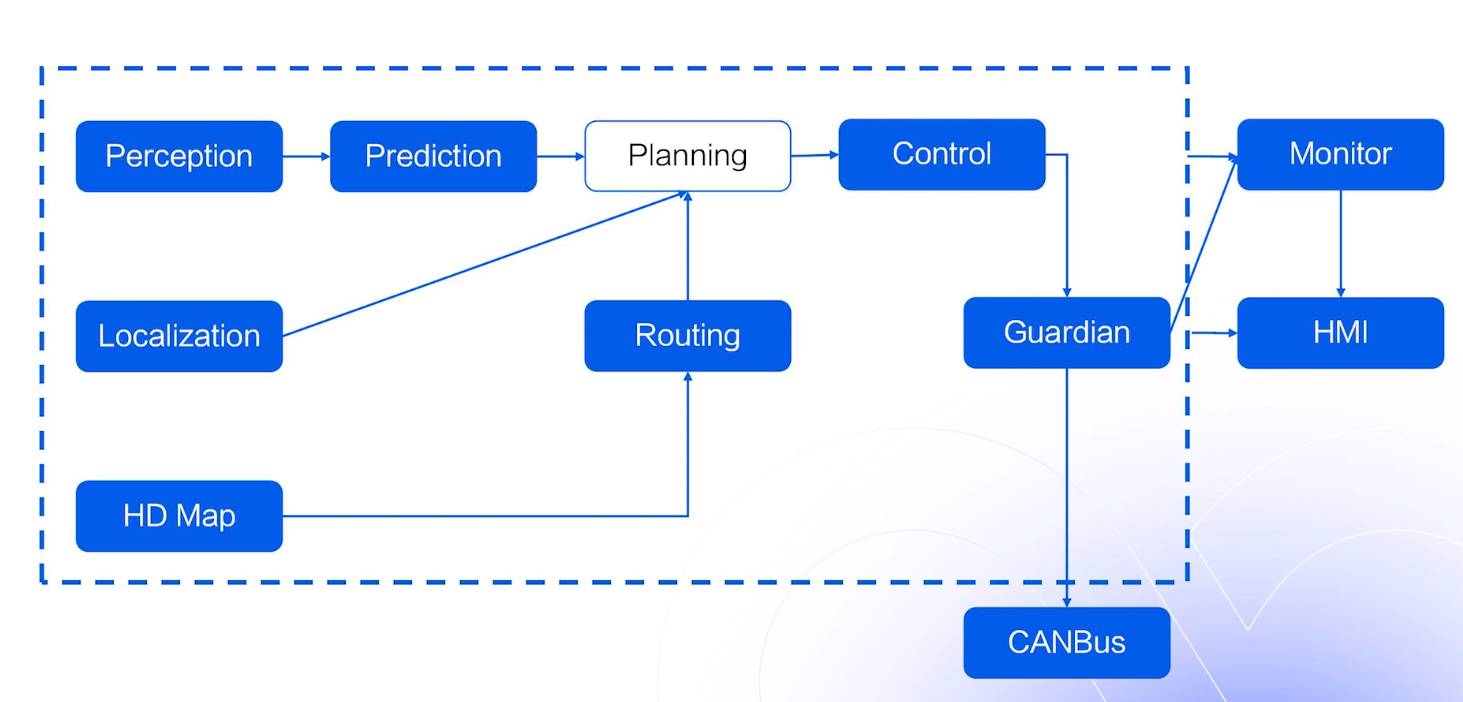
2.1 planning模块代码结构
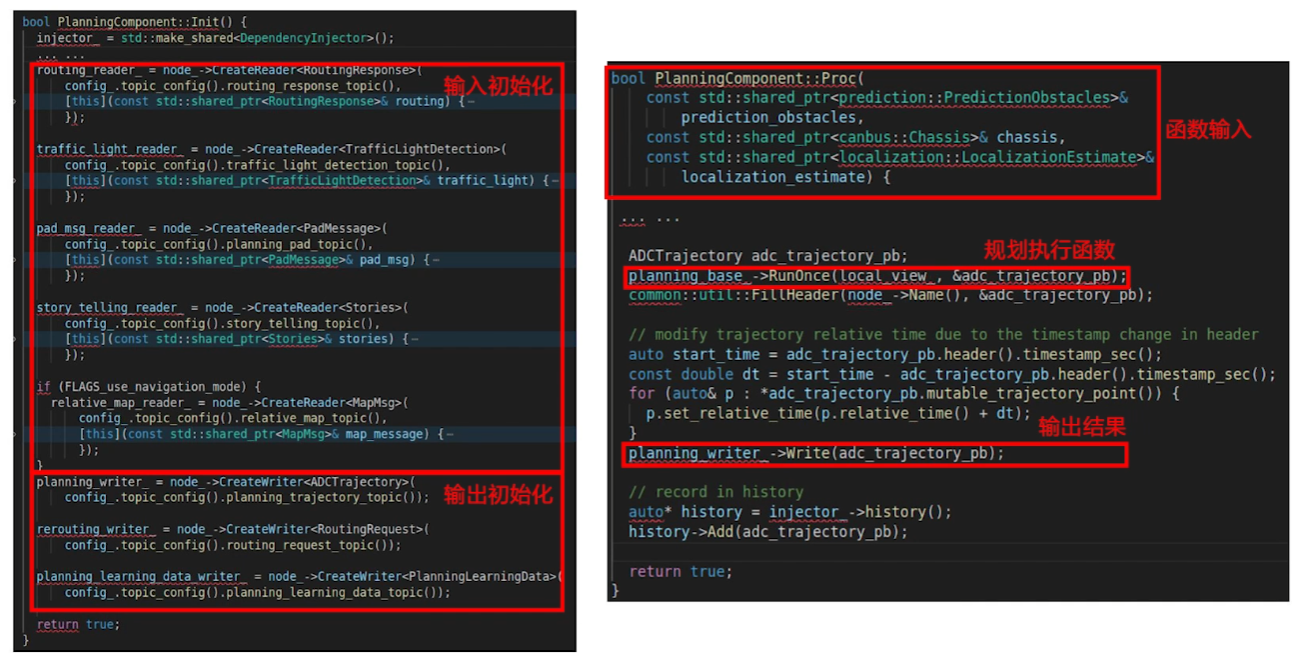
planning模块在modules/planning目录下,planning组件的入口在planning_component.cc文件中,其中Init()是组件的初始化函数,Proc是运行函数。

模块的输入数据通过Reader获取,Reader在Init()函数中初始化;组件的输出通过Writer发送,Writer在Init()函数中创建和初始化。
Proc函数的输入包括障碍物预测数据、车辆状态和定位数据;planning_base -> RunOnce函数是规划执行的主体函数。
2.2 工程框架
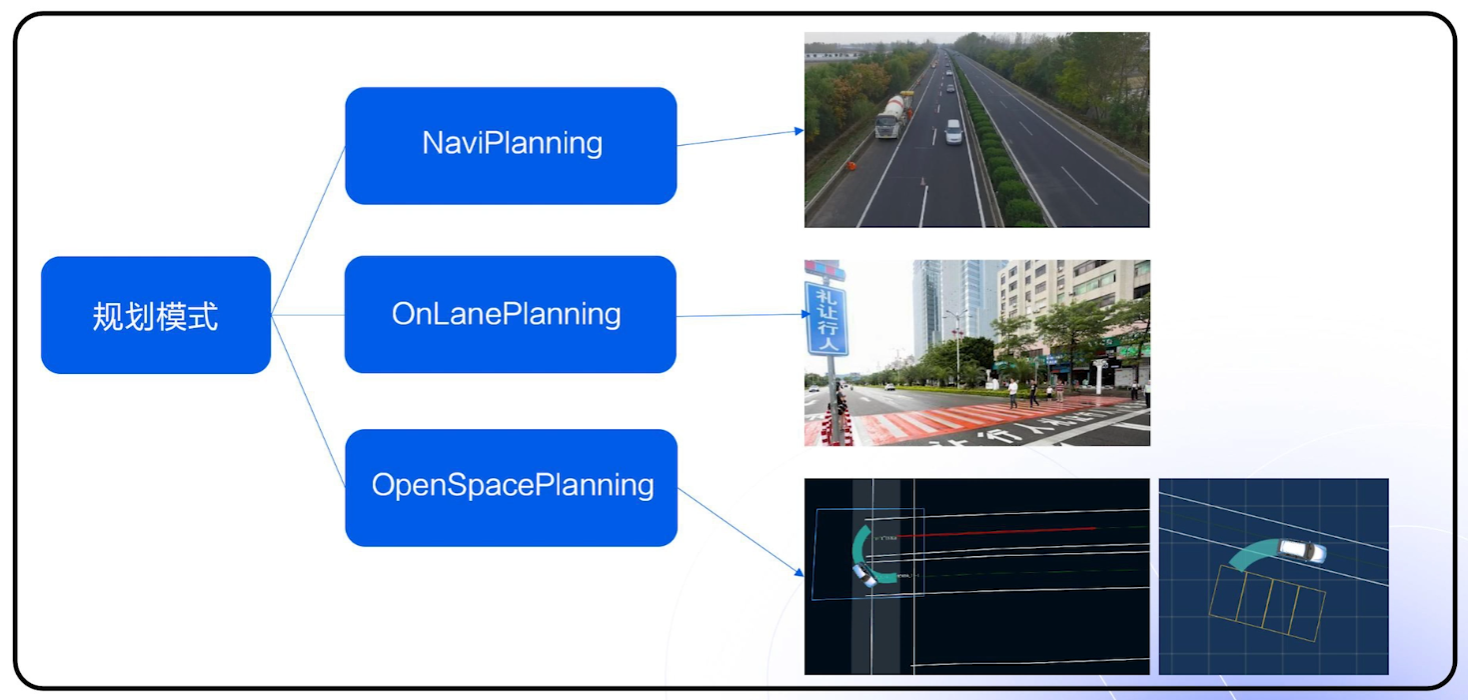
规划模式:
NaviPlanning:主要用于高速公路的导航规划;
OnLanePlanning:用于城市及高速公路等各种复杂车道;
OpenSpacePlanning:用于没有车道线的场景在,主要在自主泊车和狭窄路段的掉头时使用
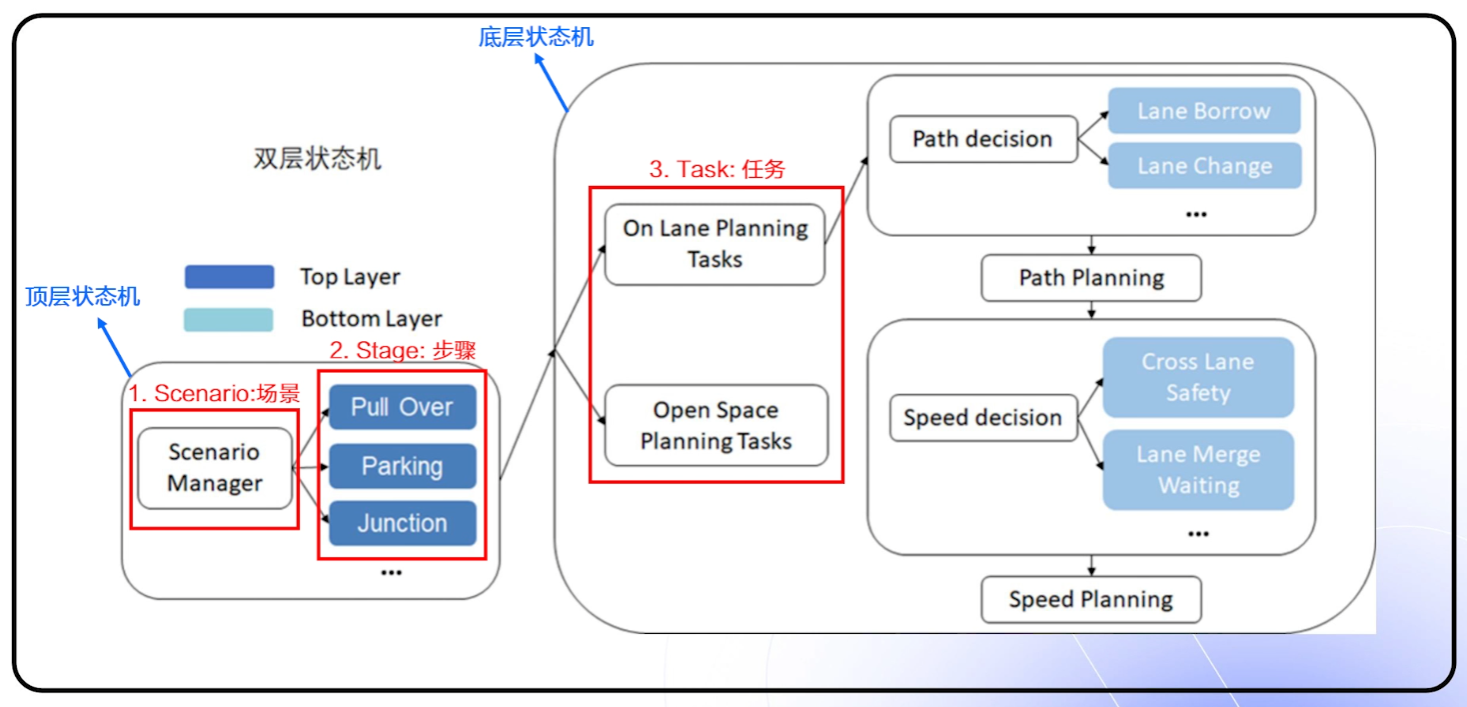
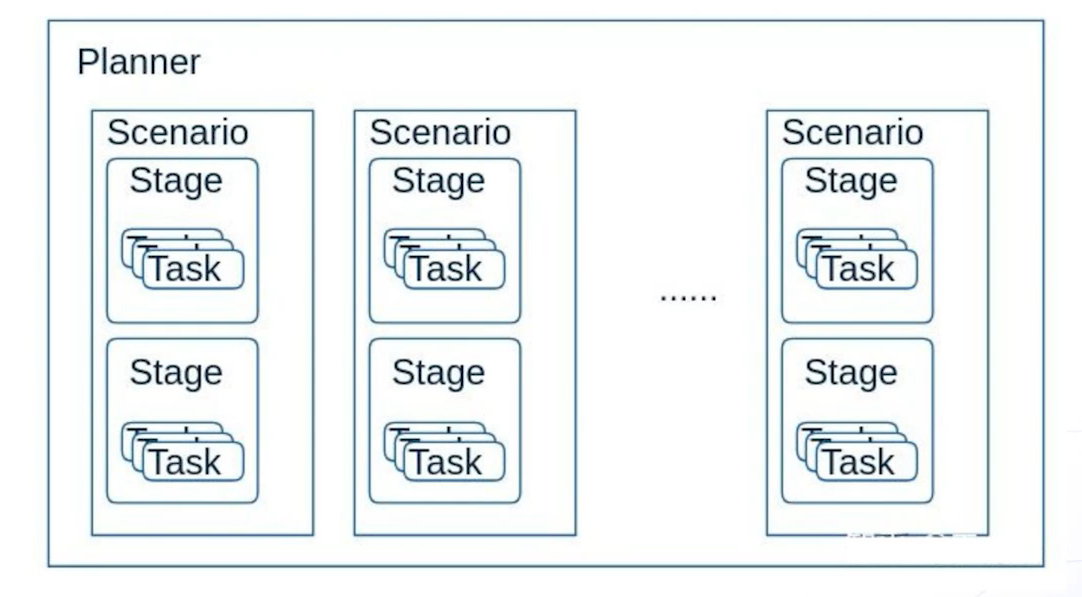
Apollo规划模块以场景调度为基本决策框架,其本质上是 一个双层状态机,主要有三个重要元素Scenario、Stage、Task。
2.2.1 场景配置
场景配置的目录在planning/conf/scenario中,Apollo提供了10多个场景,如lane_follow(根据参考线行驶)、pull_over(靠边停车)、valet_parking(泊车)等。
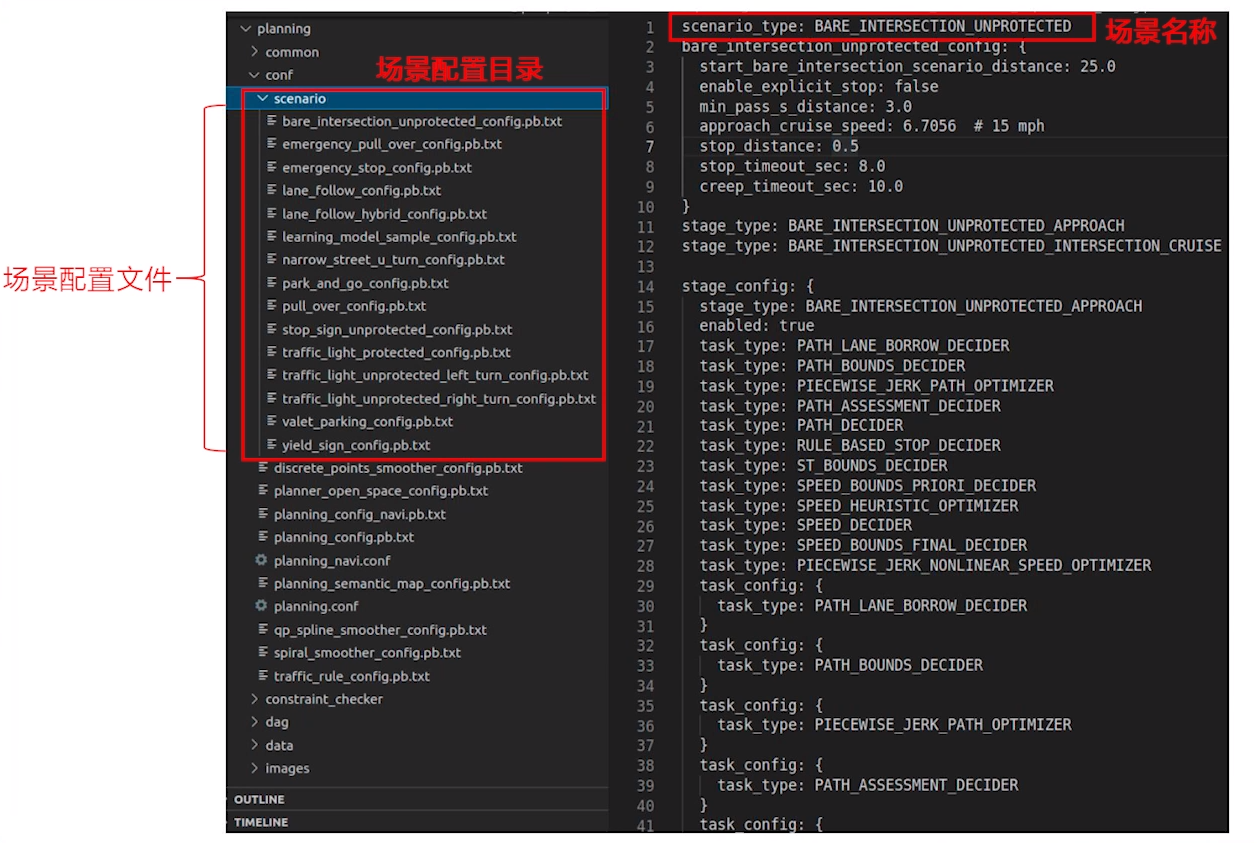
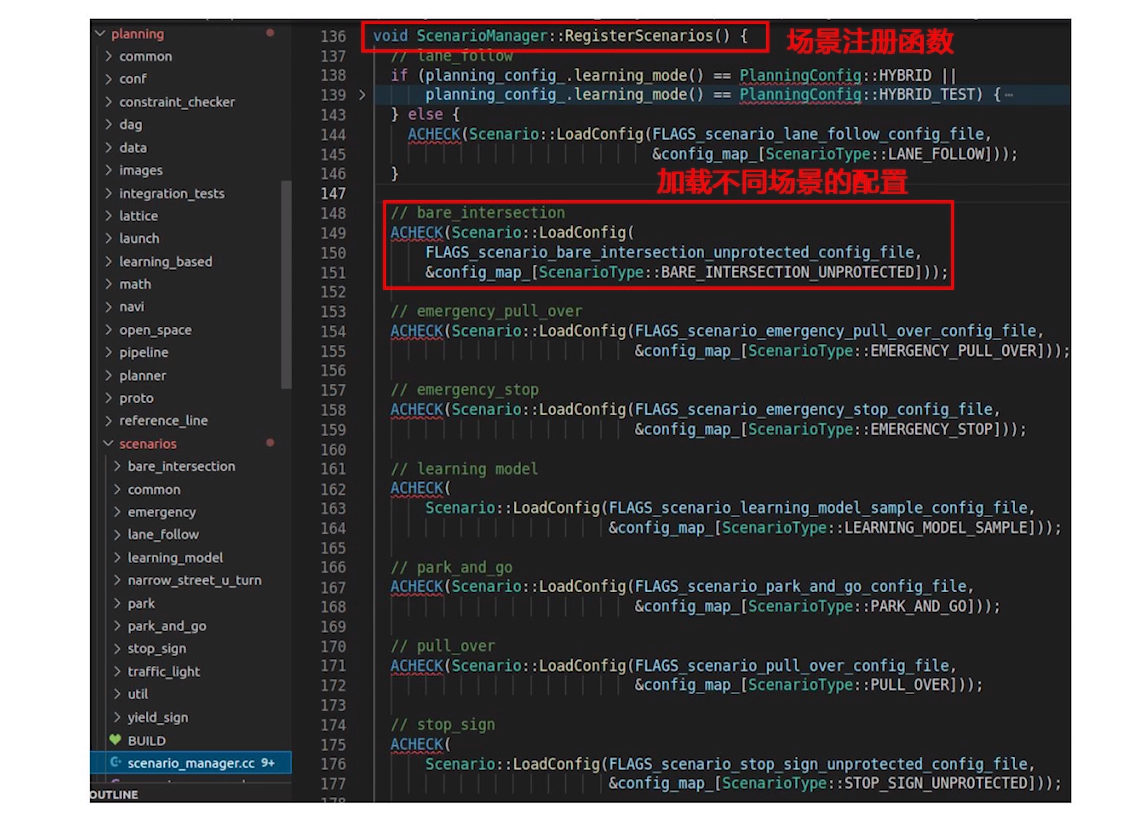
2.2.2 场景注册
场景注册在ScenarioManager中进行,注册函数是RegisterScenarios,对之前场景配置文件进行读取和注册,默认运行场景为lane_follow。
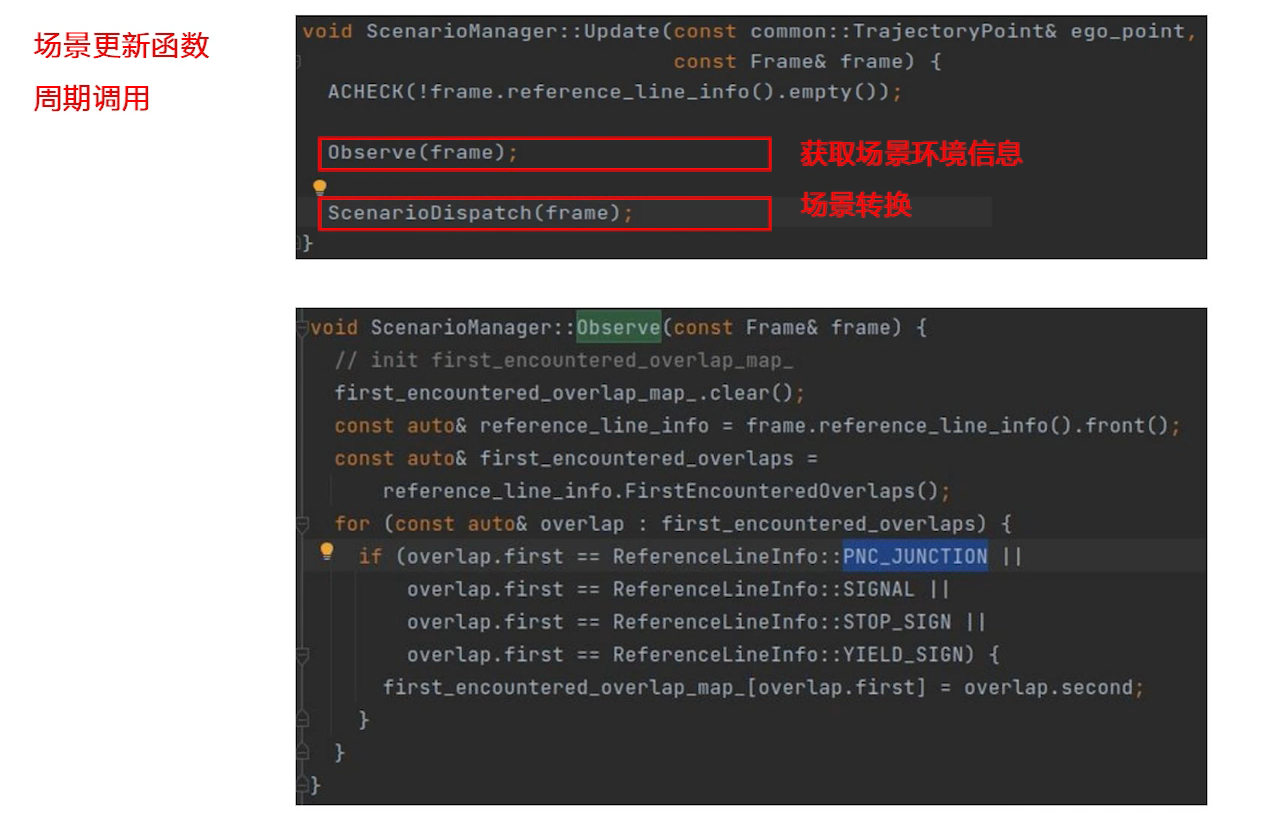
2.2.3 场景转换
场景转换在ScenarioManager::Update中实现,函数输入为:车辆当前状态信息(ego_point)、planning循环计算需要得相关信息(frame)。
是否需要场景转化通过Overlap判断,Apollo中Overlap指地图上任意重合的东西,如PNC_JUNCTION指道路之间有相互重合、SIGNAL指信号等与道路有重合、STOP_SIGN指停止标志与道路有重合。
通过ScenarioDispatch函数对场景进行转化和处理。
2.2.4 Scenario 场景
Scenario是planning模块中最上层的元素,一个Scenario包含多个Stage,一个Stage包含多个Task;执行一个Scenario就是按顺序执行不同Stage的不同Task。
Scenario的配置在planning/conf/scenario文件夹中,下图为pull_over场景的配置文件。
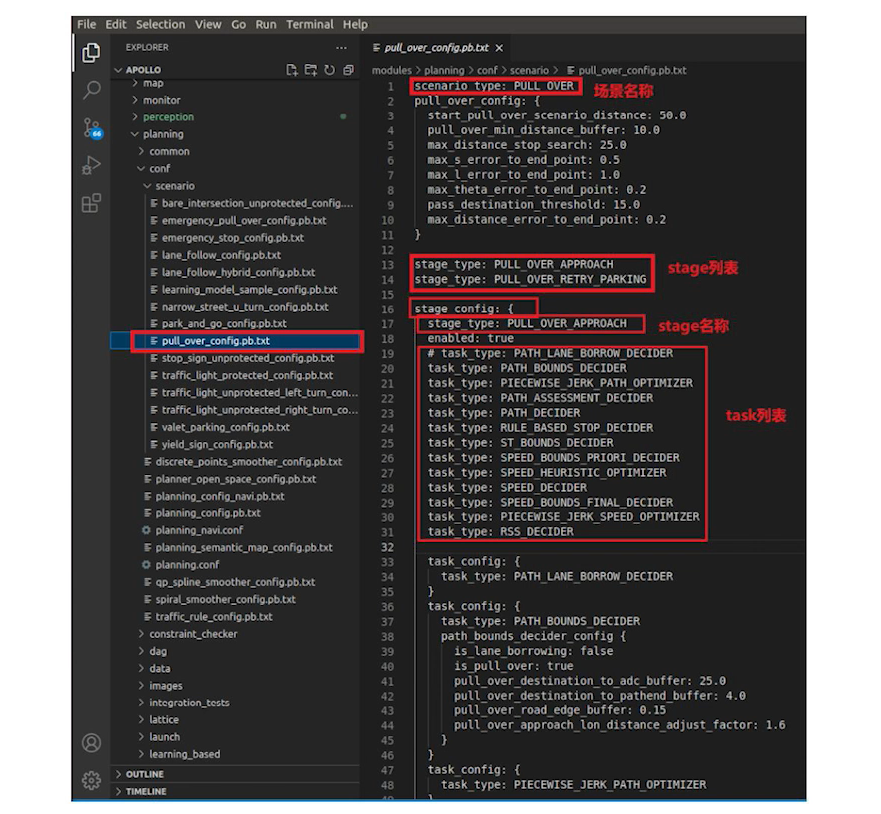
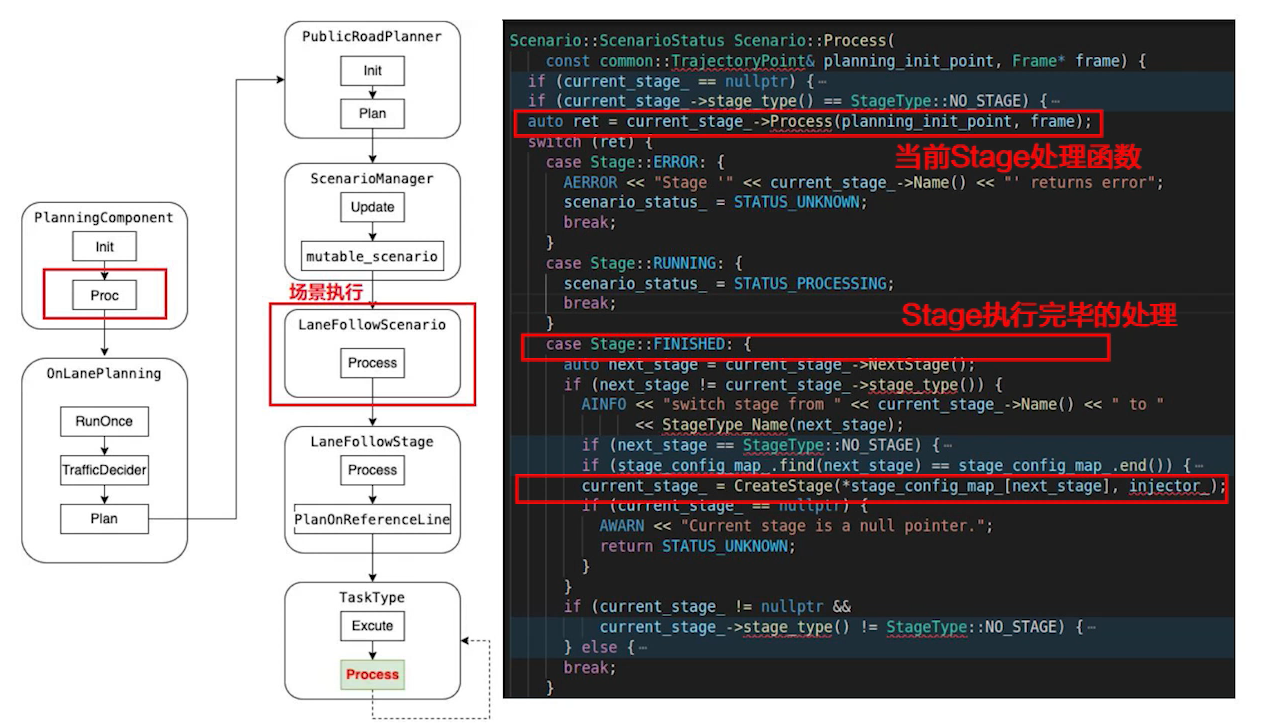
场景执行在Scenario::Process函数中进行,lane_follow场景的执行流程如下图左侧所示,图右侧为Scenario::Process函数的具体处理逻辑和流程。
2.2.5 Stage 步骤
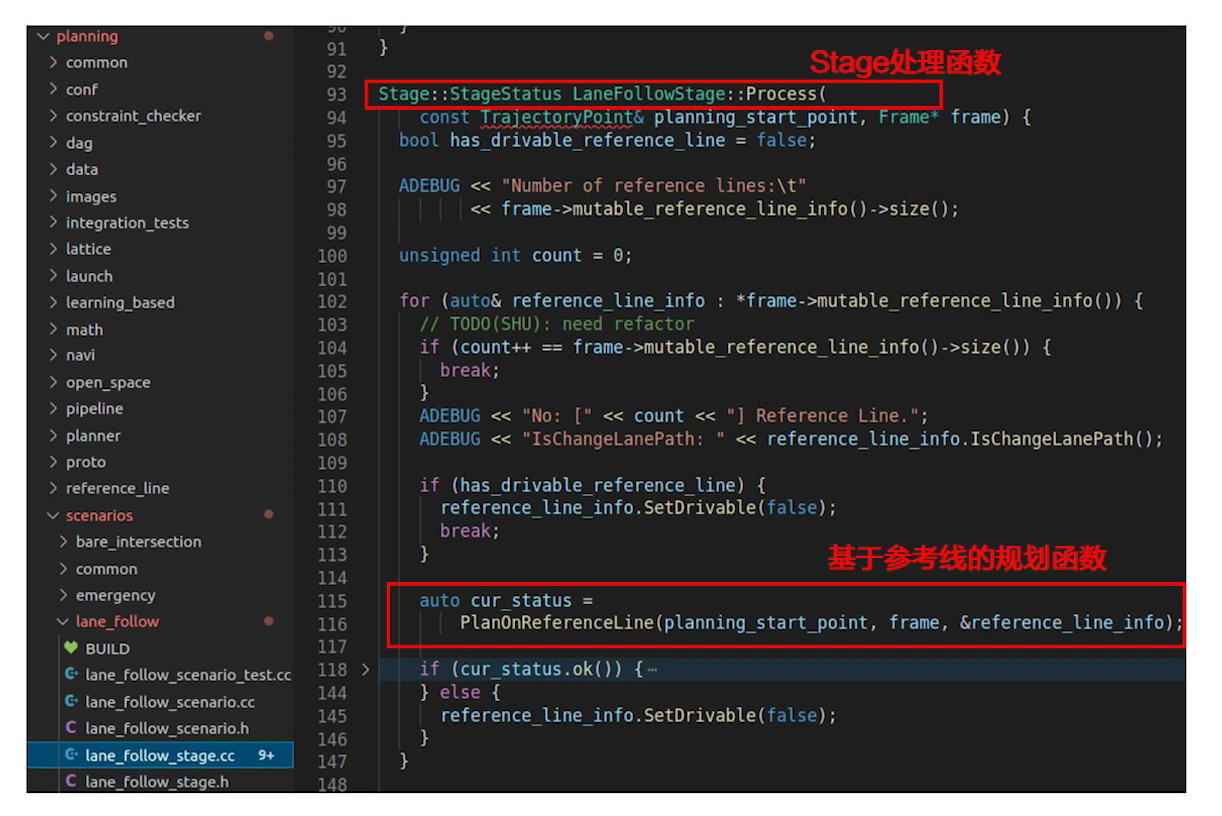
步骤执行在Stage::Process函数中进行,下图为LaneFollowStage::Process函数的具体结构。
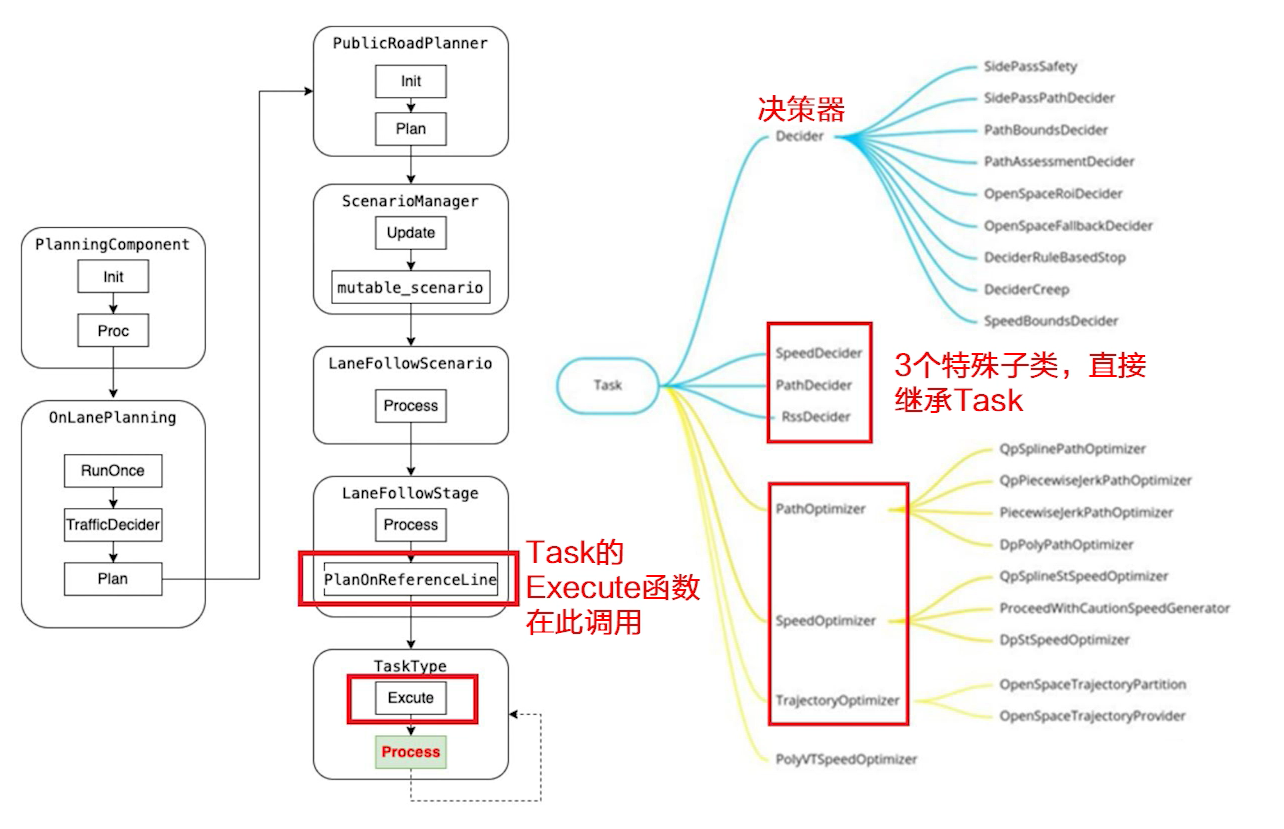
2.2.5 Task 任务
Task在planning/tasks文件夹中,task包含deciders、optimizers、learning_model三类;
在task.h文件中,Execute函数会被Stage中的ExecuteTaskOnReferenceLine调用,以执行Task的具体逻辑;
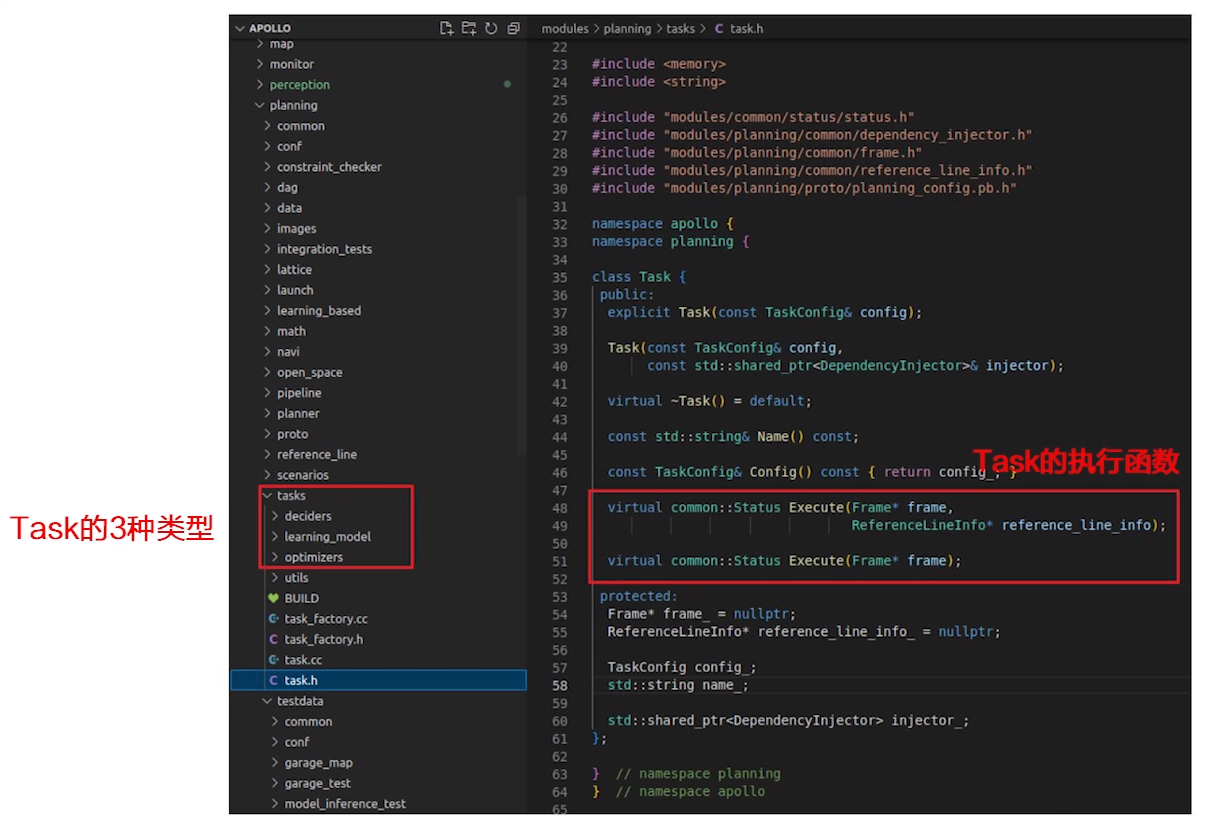
下图右侧为Task子类之间的继承关系,其中SpeedDecider、PathDecider、RssDecider三个子类直接继承自Task,优化器包含PathOptimizer、SpeedOptimizer、TrajectoryOptimizer。
三、Apollo规划算法概要
Apollo规划算法的版本迭代变化情况:
在EMPlanner变为PublicRoad Planner的改动中,主要是取消了SL和ST的迭代机制。
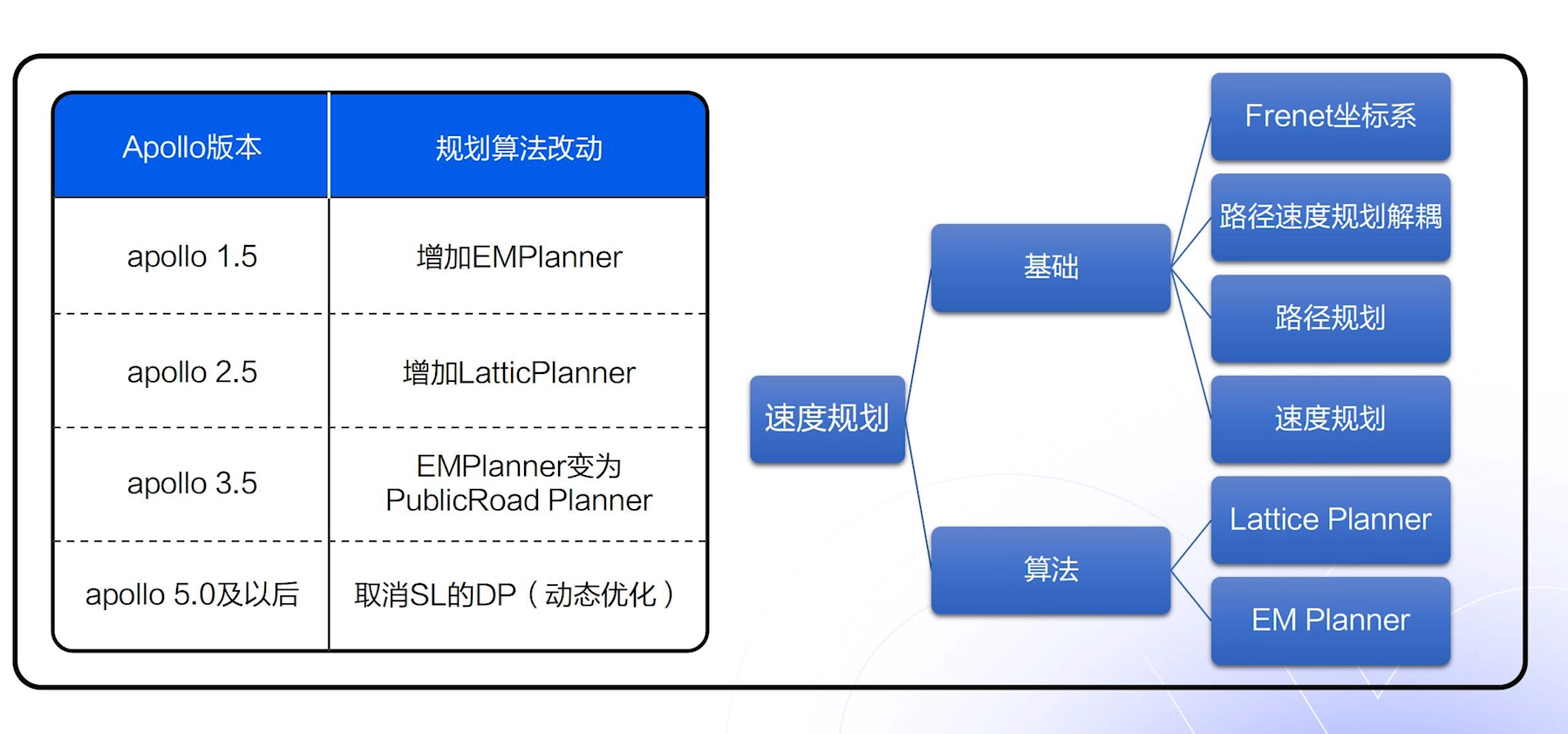
3.1 规划的基本概念
Frenet坐标系
在车辆的轨迹规划中,笛卡尔坐标系无法直接获取车辆与道路之间的关系,Frenet坐标系中纵轴S表示沿道路行驶的距离,横轴L表示车辆偏离道路中心线的距离,可直接描述车与道路的位置关系。
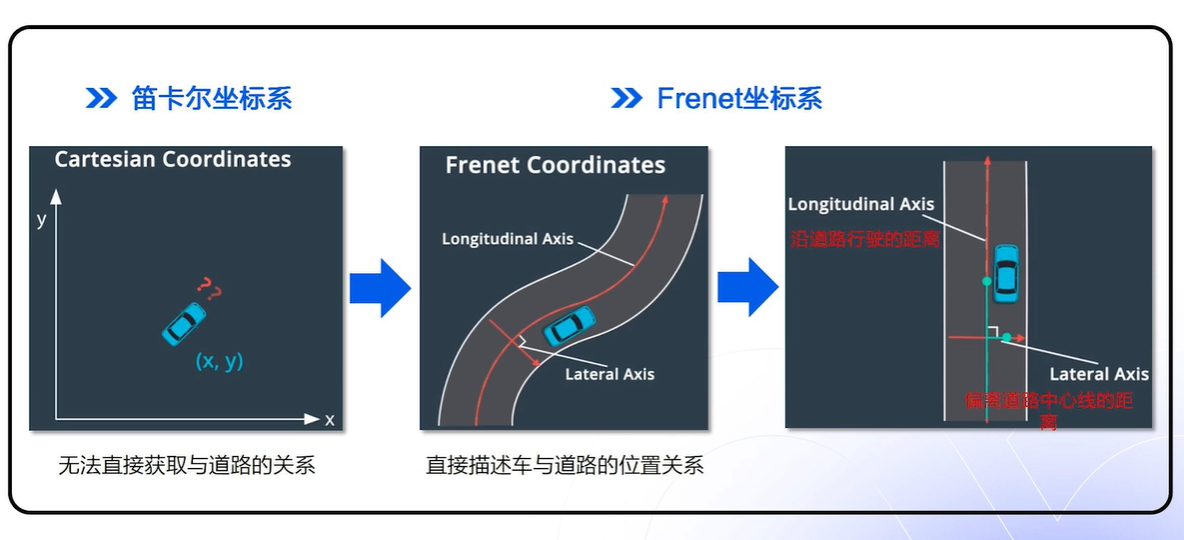
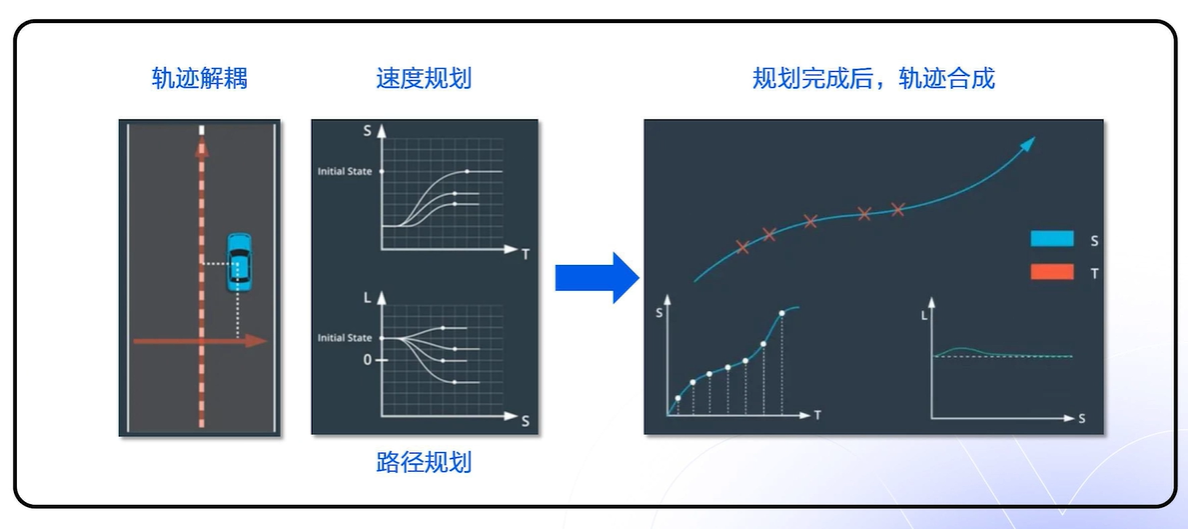
路径-速度规划解耦
在Frenet坐标系的基础上,对轨迹规划进行解耦,分为路径规划和速度规划两部分。
路径规划中生成候选曲线,即车辆的可行驶曲线,然后使用成本函数评估每条曲线,选择成本最低的路径。
速度规划在路径规划选择的路径上,考虑与障碍物的时空交集,做出跟车、停车、超车等速度决策,并使用优化算法对决策后的速度进行平滑,最终得到一条最优的速度曲线。
通过将路径和速度曲线结合,构建车辆的行驶轨迹。
3.2 轨迹规划的主要流程
路径规划
1、首先对输入的中心线采集点进行平滑,得到一条方向和曲率都连续的参考线;
2、将道路分割成单元格,对单元格中的点随机采样,连接单元格中的点,得到候选路径;
3、计算候选路径的成本,主要考虑偏离参考线、碰撞、速度限制和舒适度等要求;
4、选择成本最低的路径。

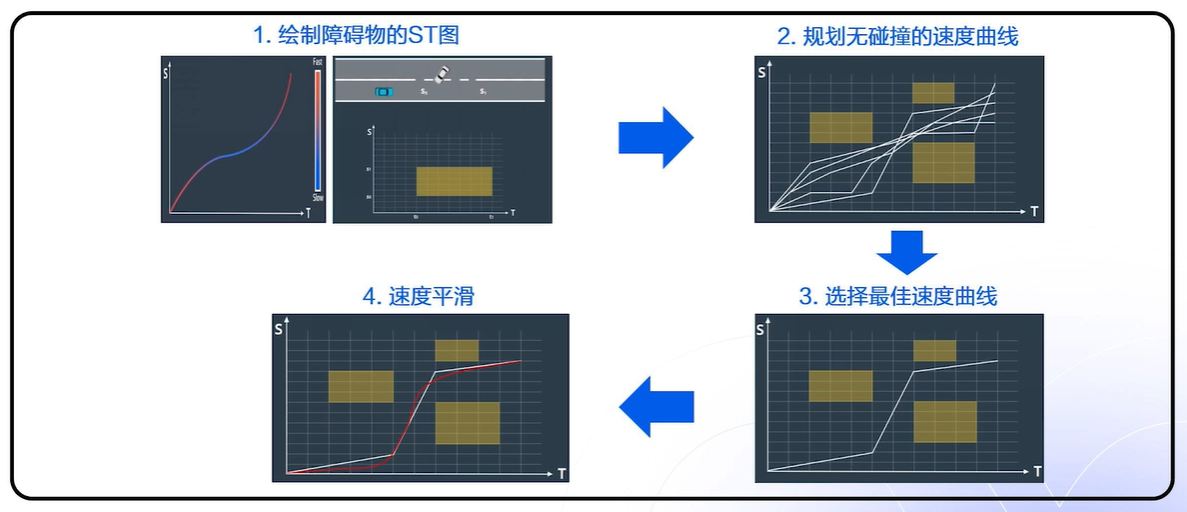
速度规划
1、速度规划采用S-T图,横坐标是时间T,纵坐标是距离S,并将S-T图网格化;道路的障碍物绘制为特定时间段内阻挡道路某些部分的矩形;
2、规划出无碰撞的速度曲线;
3、采用优化引擎算法选择成本最低的速度曲线;
4、对速度曲线进行平滑处理;
3.3 Lattice-Planner
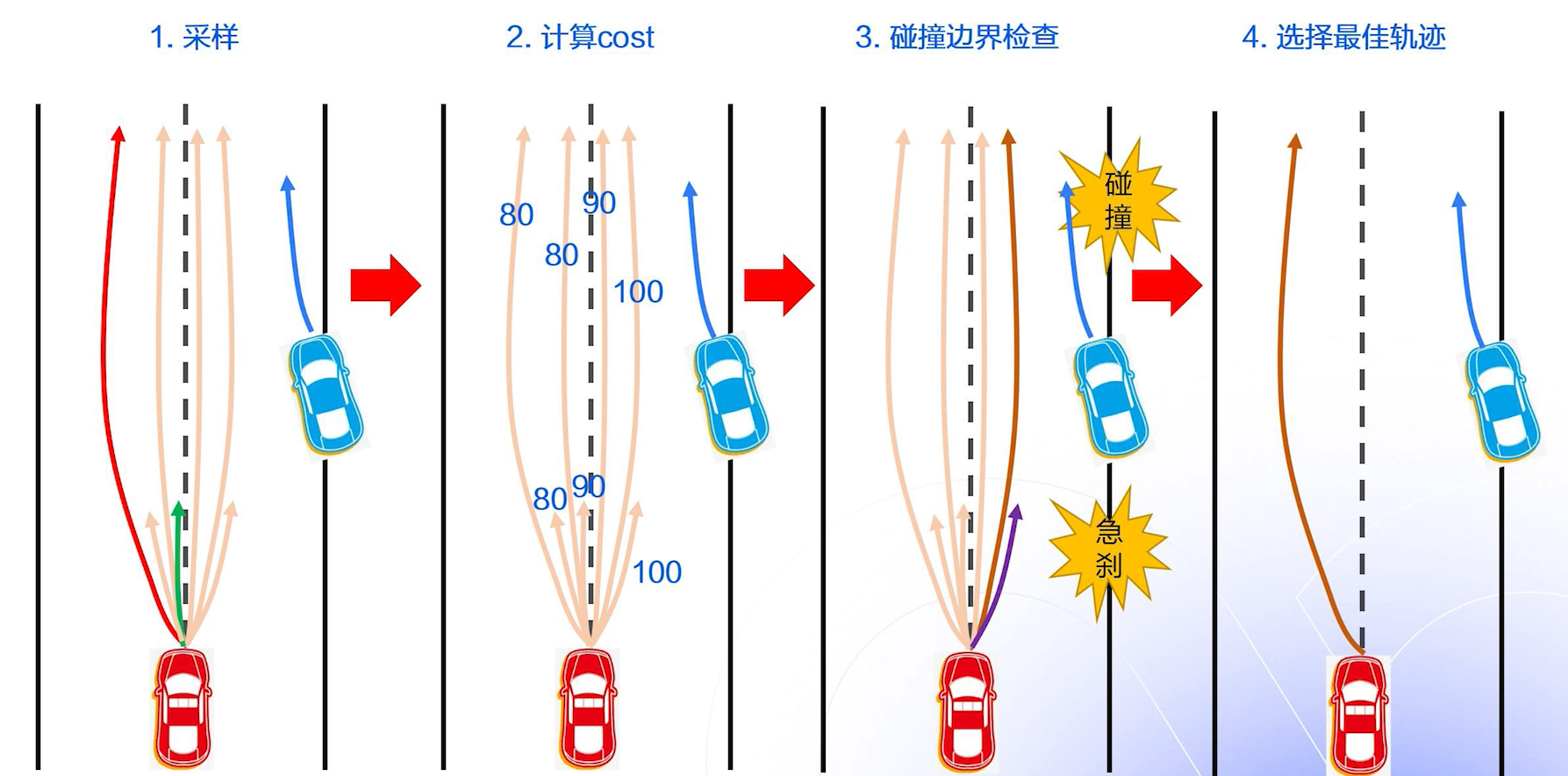
Lattice-Planner是一种局部轨迹规划器,输出一条光滑无碰撞,并且满足车辆动力学约束的轨迹。
规划流程:
1、采样足够多的轨迹,以便提供尽量多的选择;
2、计算每一条轨迹的成本,考虑轨迹的可行性、安全性等因素;
3、循环检测:选择成本最低的轨迹,对其速度物理限制和碰撞进行检测,判断是否满足要求,若满足要求则退出循环;
4、选择最优的车辆轨迹
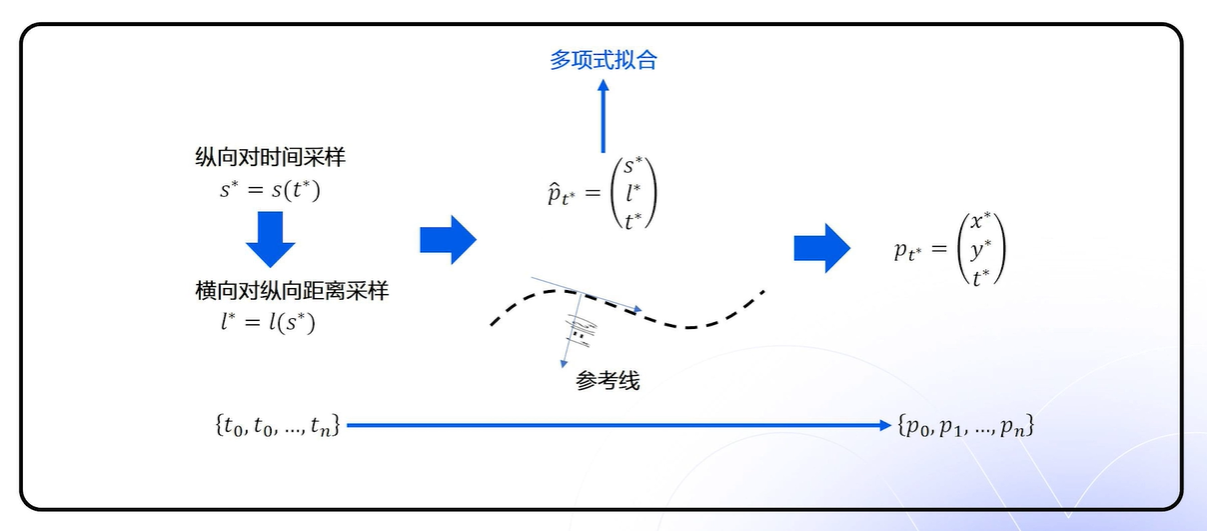
Lattice-Planner采样过程:
1、在Frenet坐标系下纵向采样,即纵向距离 s 关于时间 t 的采样;然后进行横向采样,即横向距离 l 关于纵向距离 s 的采样;
2、用多项式对其分别进行拟合,得到Frenet三维轨迹,表示为 s, l, t 的多项式函数;
3、Frenet三维轨迹结合参考线信息,可得到笛卡尔坐标系下的运动轨迹 (x, y, t);
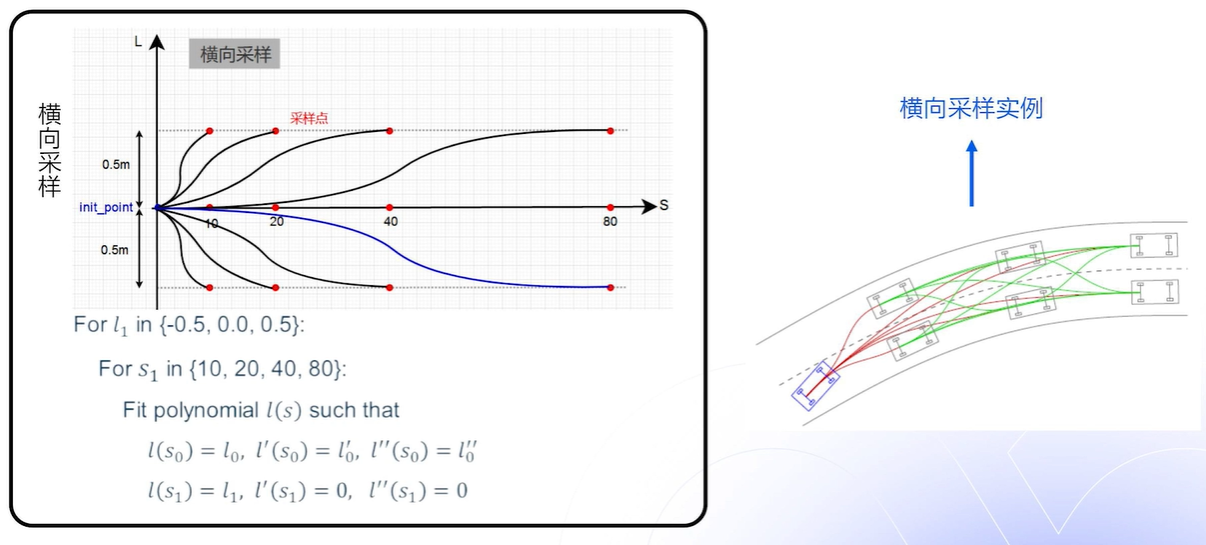
在横向采样中,Apollo设计了3个末状态横向偏移量,分别为 -0.5, 0, 0.5;4个纵向位移,分别为10, 20, 40, 80;用两层循环遍历各种组合,然后通过多项式拟合,获得一系列横向轨迹。
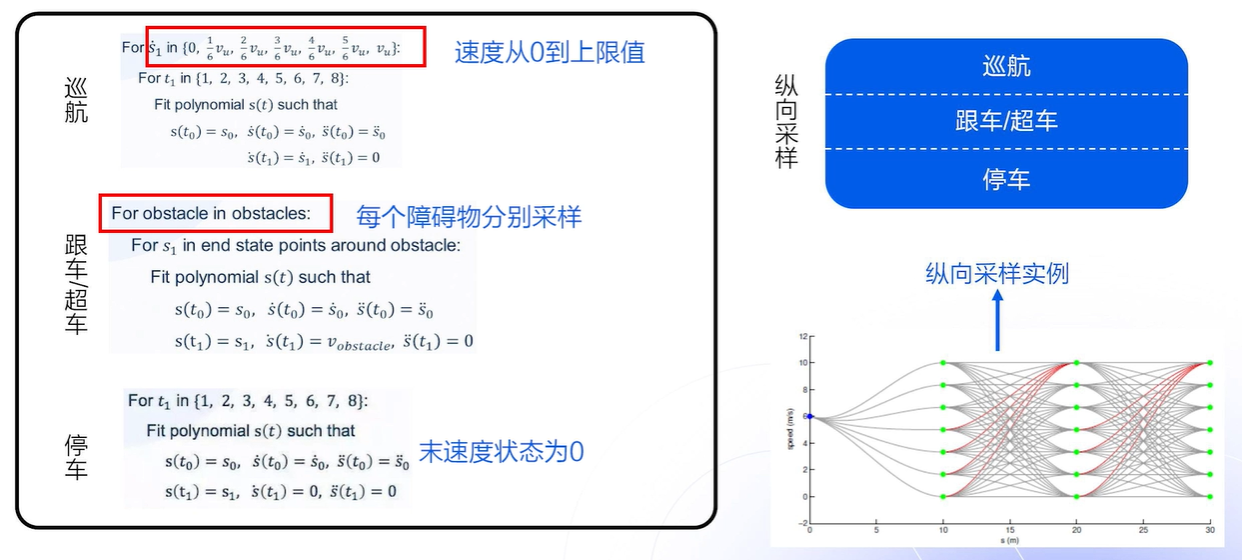
纵向采样考虑巡航、跟车/超车、停车三种状态。
巡航状态采用两层循环进行采样,外层循环将速度从0到速度上限值进行等间隔遍历,内层循环遍历到末状态速度的时间,从1s到8s的间隔均匀遍历;采用四次多项式拟合。
在停车状态中,给定停车点,末状态的速度和加速度为0;一层循环即可采样到停车点。
跟车/超车状态中,需对每个障碍物分别采样超车/跟车所对应的末状态,然后采用多项式拟合,获得一系列的纵向轨迹。
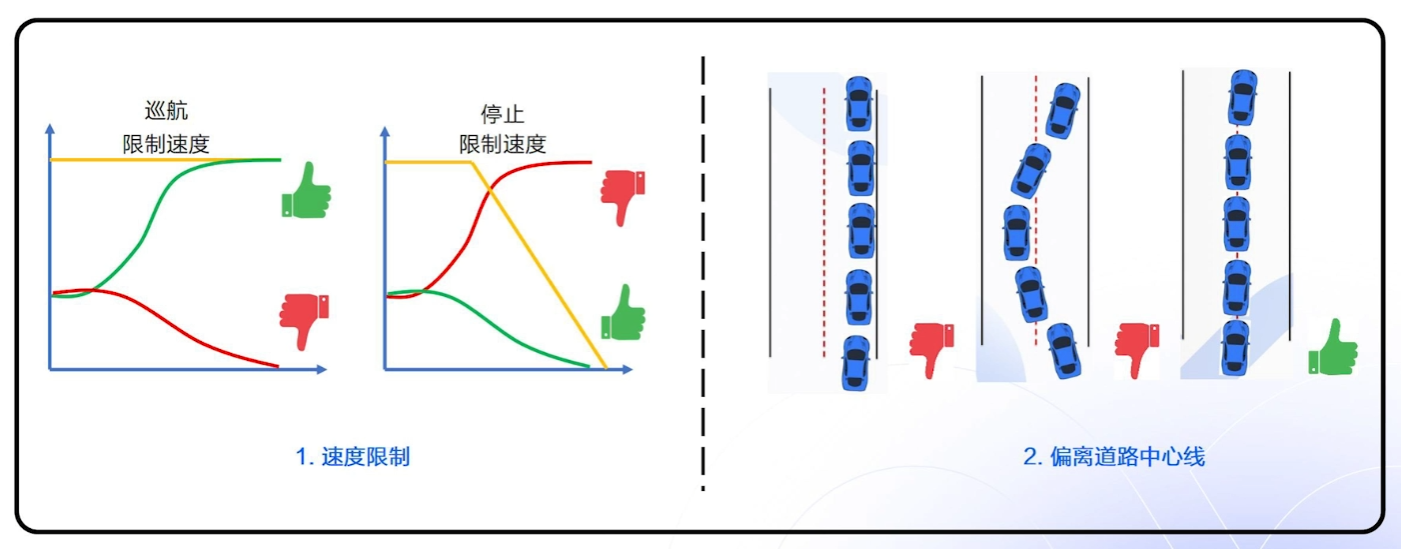
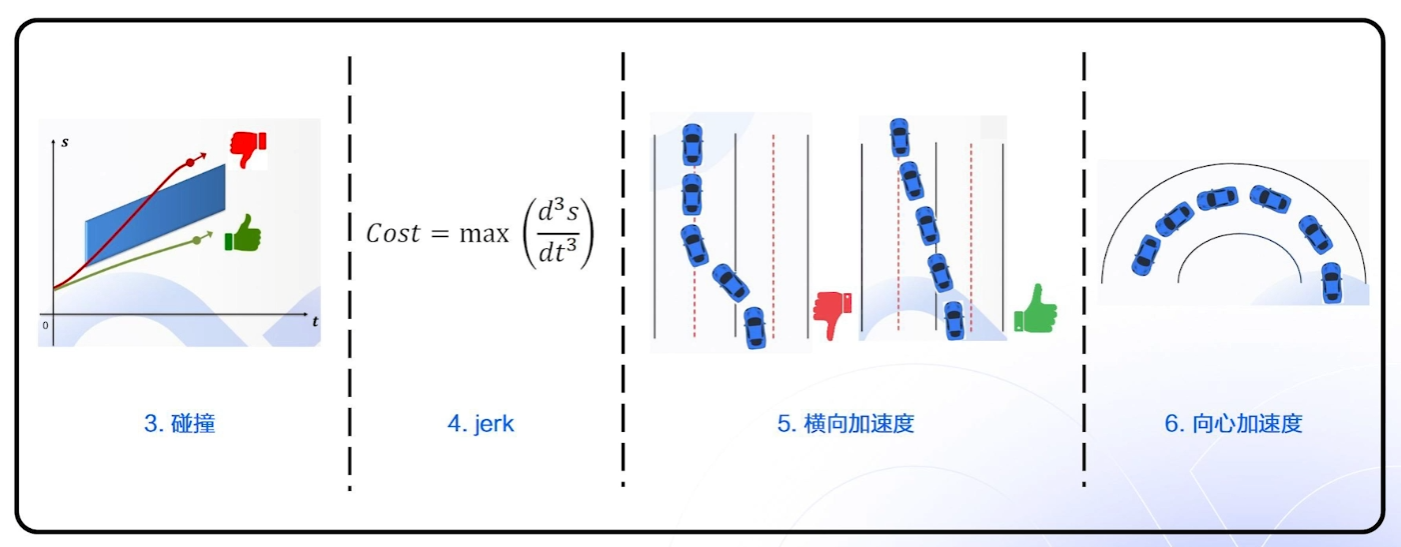
采样完成后,计算轨迹的成本,选择最优轨迹。轨迹成本考虑的因素有:速度限制、偏离道路中心线、碰撞、jerk、横向加速度、向心加速度。
3.4 EMPlanner
EMPlanner(Expectation Maximum Planner)为最大期望算法,其分两个步骤交替进行:第一步计算期望值E,利用对隐藏变量的现有估计值,计算其最大似然估计值;第二步是最大化M,为了最大化在E步骤上求得的似然值来计算参数的值;M步上找到的参数估计值被用于下一个E步骤计算中,以此循环迭代。
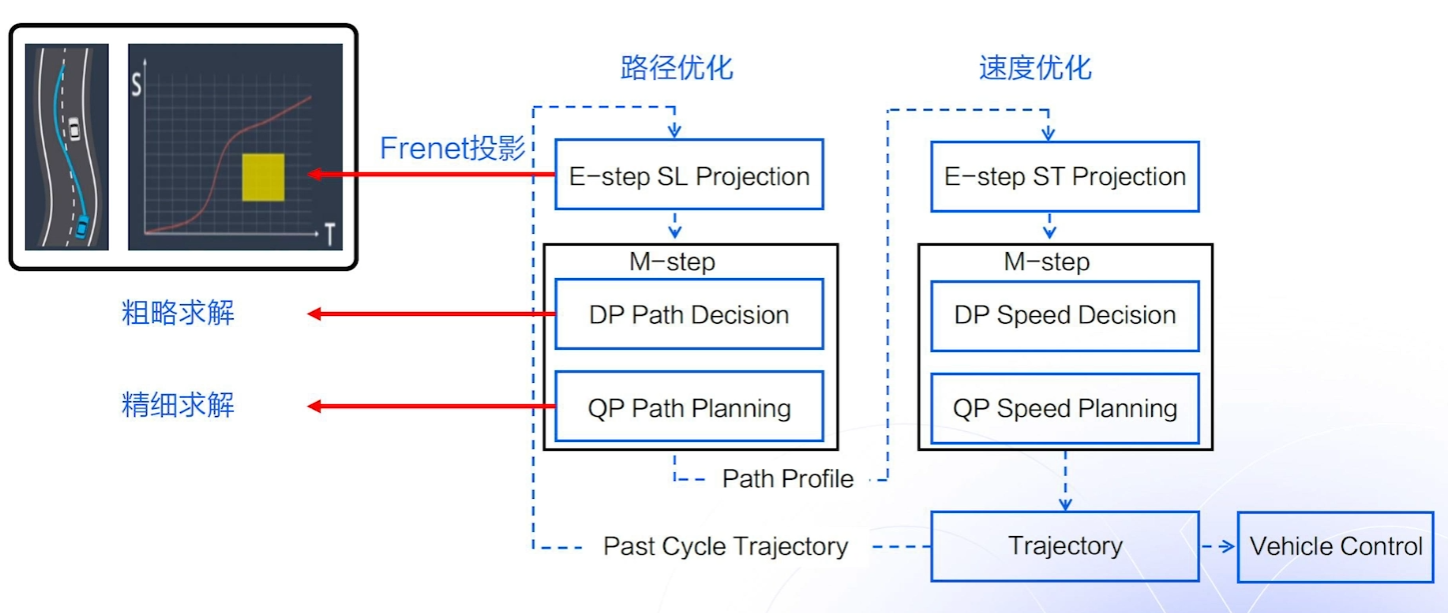
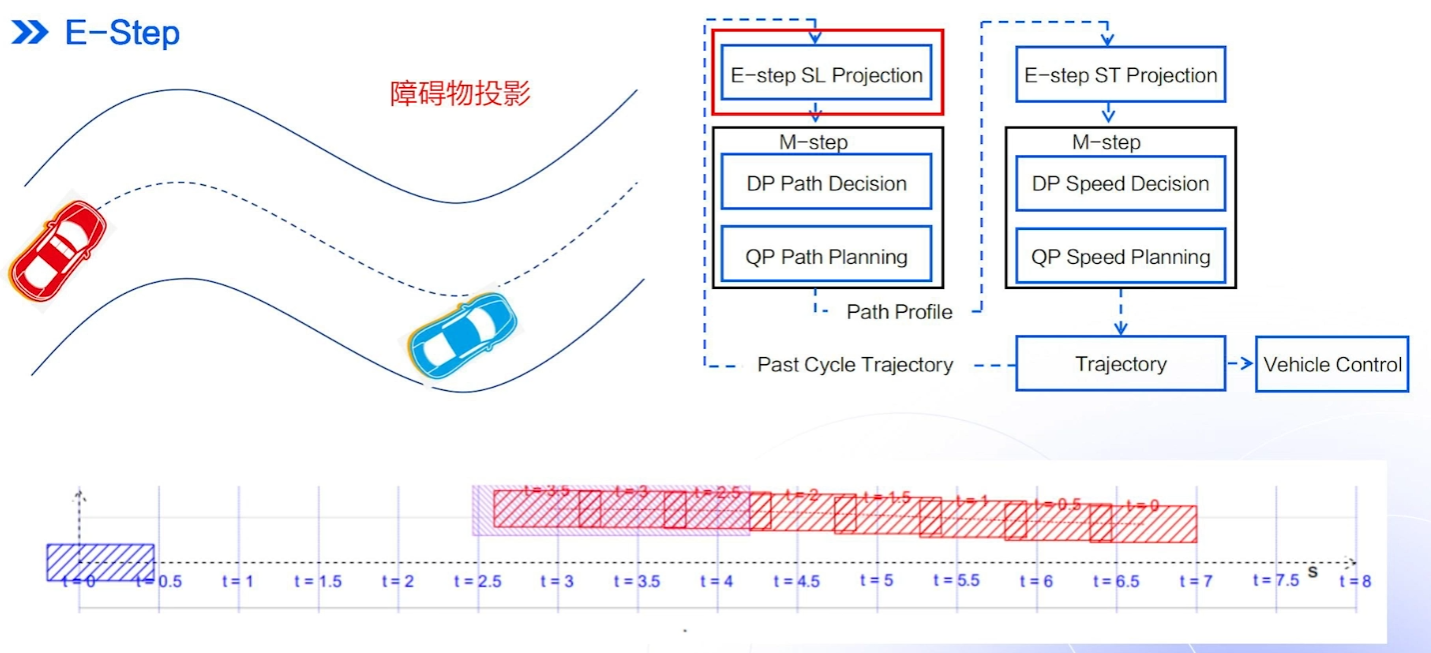
Apollo的EMPlanner分别对路径和速度进行迭代优化,E步骤将当前障碍物投影,计算车辆轨迹与障碍物之间的关系;M步依次采用动态规划(DP)、二次规划(QP)进行粗略求解、精细求解(平滑)。
3.4.1 路径规划
E-Step:
基于曲率导数连续的光滑参考线,将障碍物在SL空间投影;给定一个时刻,如果自车与预测的障碍物轨迹有重叠区域,此区域被标注为与动态障碍物的估计交互区域。
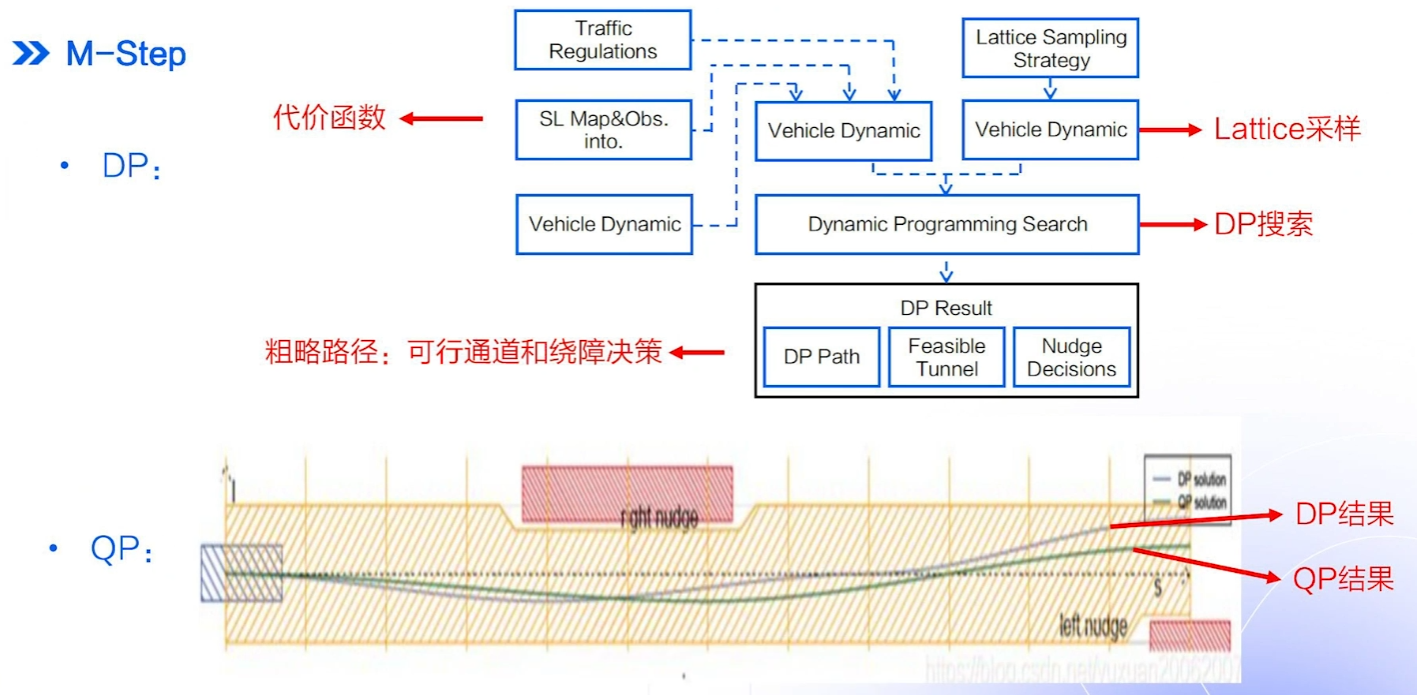
M-Step:
求解Frenet坐标系下的最优路径规划,即在一个非凸的区间,找到一个最有的L关于S的方程。主要包括基于DP的路径决策和基于样条的路径规划两。
基于DP的路径决策提供一条粗略的路径信息,包含可行通道和绕障决策;根据DP产生的路径,采用基于QP的样条曲线产生光滑的路径。
3.4.2 速度规划
E-Step:
对障碍物进行ST投影
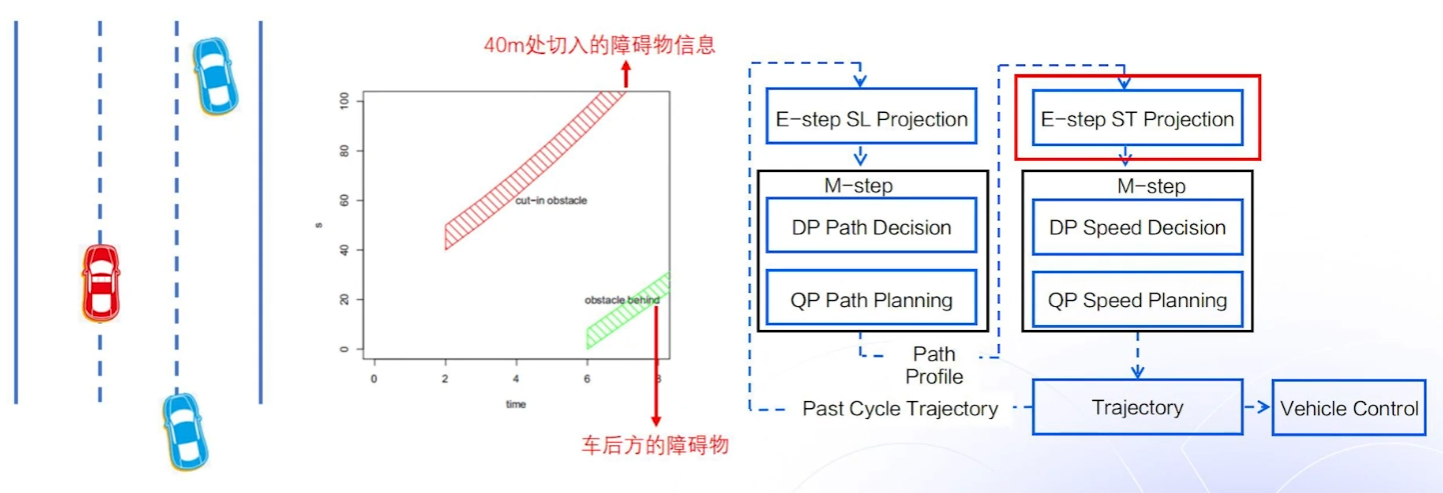
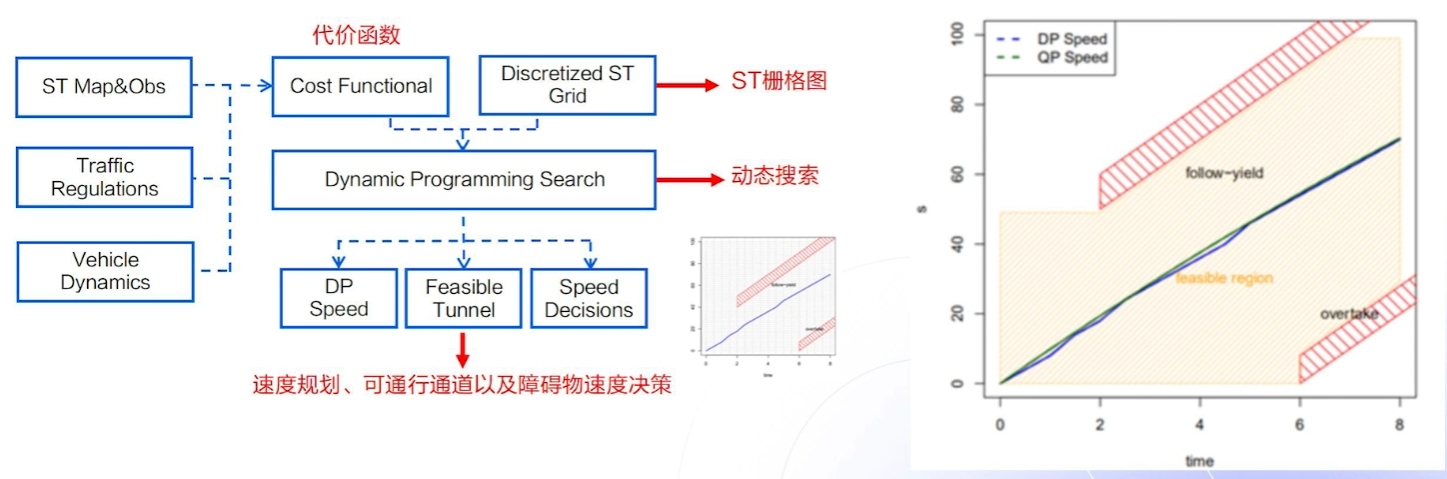
M-Step:
采用DP配合样条曲线计算光滑的速度规划,DP动态搜索的结果包括速度规划、可通行通道和障碍物速度决策,QP基于DP的速度规划曲线进行平滑处理。
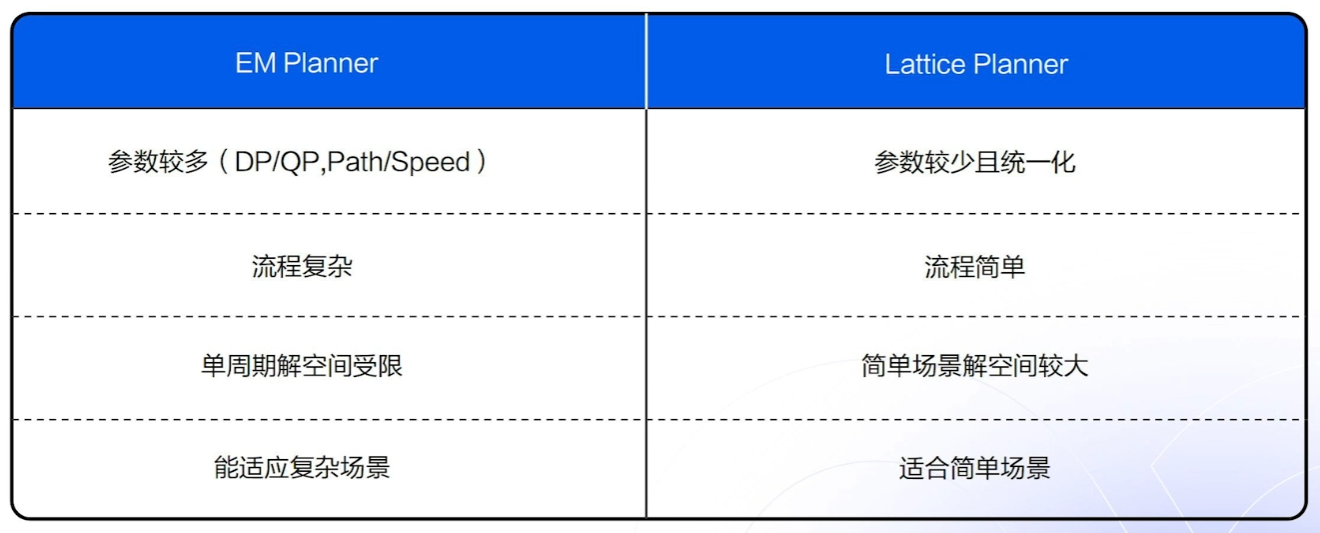
3.5 算法对比















 4346
4346











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









