







永磁同步电机控制系列课程:
第十四篇 永磁同步电机控制-大总结
——————————————————————————————————————————
永磁同步电机因其高功率密度、高效率和优异的动态性能,在现代工业、新能源汽车、伺服系统等领域得到了广泛应用。其控制系统是发挥其性能优势的核心。
一、 核心控制目标
转矩控制:核心目标。实现快速、平滑、精确的转矩输出,减少纹波。
转速控制:实现宽范围、高精度的速度调节,具有良好的动态响应和抗负载扰动能力。
位置控制:(伺服系统)实现精准的转子位置跟踪。
高效率运行:在宽速域范围内,通过控制策略(如MTPA、弱磁)最大化系统效率。
可靠性:具备过流、过压、过温、失步等故障保护功能。
二、 核心控制架构:FOC(磁场定向控制)
目前高性能PMSM控制的主流方案是矢量控制(FOC),也称为磁场定向控制。其核心思想是将电机模仿成他励直流电机进行控制,实现转矩和磁场的解耦。
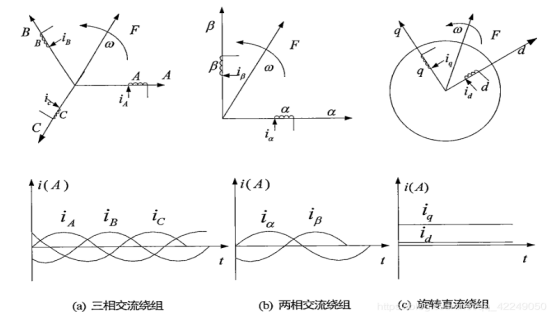
1、坐标变换(3/2变换与同步旋转坐标变换)
Clark变换:将三相静止坐标系(ABC)下的相电流 (Ia, Ib, Ic) 转换为两相静止坐标系(αβ)下的电流 (Iα, Iβ)。
Park变换:将两相静止坐标系(αβ)下的电流 (Iα, Iβ) 转换为随转子同步旋转的坐标系(dq)下的电流 (Id, Iq)。
d轴:直轴,与转子永磁场方向对齐,Id 代表励磁电流分量。
q轴:交轴,领先d轴90度电角度,Iq 代表转矩电流分量。
解耦本质:通过此变换,将交流量的控制转变为直流量的控制。
2、双闭环控制结构
外环:通常为速度环(或位置环)。
速度给定 ω_ref 与速度反馈 ω_fb 比较后,经PI控制器输出作为转矩电流的给定值 Iq_ref。
内环:两个电流环(d轴和q轴)。
Id_ref 通常给定为0(对于表贴式PMSM),或由MTPA算法给出(对于内置式PMSM)。
Iq_ref 来自外环输出。
电流PI控制器计算出的电压指令 (Vd, Vq),经反Park变换 回到静止坐标系(αβ),再通过SVPWM 模块生成驱动逆变器的PWM信号。
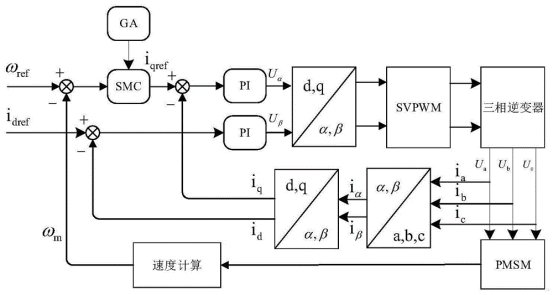
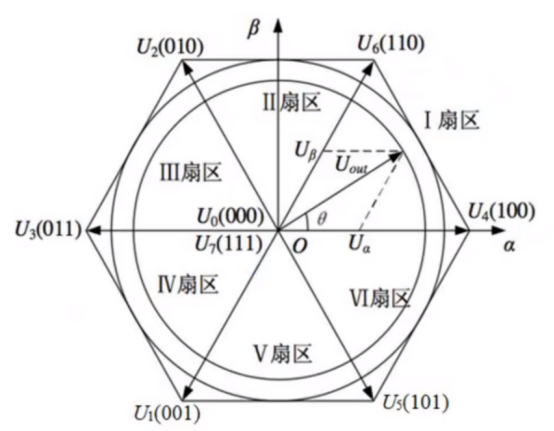
3、SVPWM(空间矢量脉宽调制)
一种优化的PWM技术,相比于传统的SPWM,直流母线电压利用率提高约15%,谐波更少,转矩脉动更小。
通过8个基本电压矢量(6个有效矢量,2个零矢量)的合成,在电机内部产生一个逼近理想圆形旋转磁场的磁动势。
三、 关键控制策略
1、Id=0 控制
最简单、最常用的策略,适用于表贴式PMSM(SPMSM)。
让d轴电流分量为零,全部电流用于产生转矩(q轴),实现了完全的解耦控制。
优点:控制简单,铜耗最小。
缺点:对于内置式PMSM(IPMSM),未能利用磁阻转矩,不是最优效率。
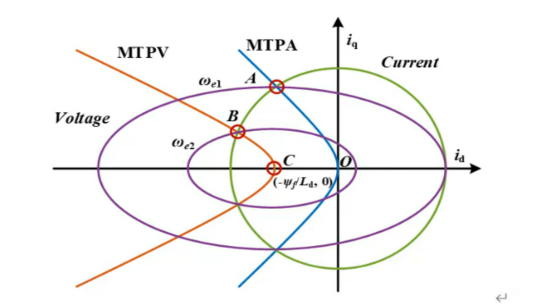
2、MTPA(最大转矩每安培控制)
适用于内置式PMSM(IPMSM)。
IPMSM的转矩由永磁转矩和磁阻转矩共同构成。MTPA策略的目的是对于给定的转矩指令,找到一对最优的(Id, Iq)组合,使得定子电流幅值最小,从而降低铜耗,提高效率。
这是实现IPMSM高效运行的基础。
3、弱磁控制
问题:电机反电动势随转速升高而增大。当转速达到基速后,母线电压不足以提供所需的电流,导致无法继续升速。
解决方案:弱磁控制。通过注入负的d轴电流(-Id) 来主动削弱转子磁场,从而降低反电动势,使电机能够在更高转速下运行。
这是一种“削足适履”的策略,用牺牲部分转矩能力来换取转速的提升。
4、无传感器控制
去除物理位置/速度传感器(如编码器、旋变),通过检测电机端电压和电流来估算转子位置和速度。
主要方法:
高频信号注入法:适用于零速和低速阶段,基于电机的凸极性(Saliency)。估算精度高,但会引入噪声和振动。
模型基观测器法(如滑模观测器-SMO、龙贝格观测器、扩展卡尔曼滤波-EKF):适用于中高速阶段,基于电机的反电动势模型。速度越高,反电动势越明显,估算越准确。
通常采用混合方案:低速用高频注入,中高速用模型观测器,实现全速域无传感器运行。
四、 先进与智能控制方法
PID控制改进:抗积分饱和、模糊自适应PID等,以改善传统PI控制在非线性系统中的性能。
滑模变结构控制(SMC):对参数变化和外部扰动具有很强的鲁棒性,但存在“抖振”问题。
自适应控制:在线辨识电机参数(如电阻、电感、磁链),使控制器能适应电机参数的变化(如温升)。
预测控制(MPC):基于电机模型预测未来时刻的行为,通过优化代价函数来选择最优的开关状态。动态响应快,但计算量大。
人工智能(AI)控制:利用神经网络(NN)、深度学习等实现参数自整定、故障诊断等,是目前的研究前沿。
五、总结与挑战
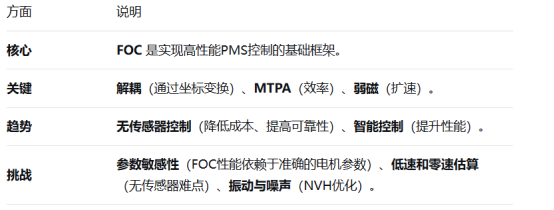
PMSM控制就是一个“知己知彼”的过程:通过坐标变换“知己”(解耦转矩和磁场),通过位置传感器或无传感器算法“知彼”(知道转子在哪),然后通过精巧的算法(如MTPA、弱磁)发出精准的指令(SVPWM),最终实现高效、平稳、快速响应的能量转换。
永磁同步电机MATLAB仿真:
https://download.csdn.net/download/Stephen_Pei/91805682?spm=1001.2014.3001.5503


















 1661
1661

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











