







“ 本期介绍一种用状态空间方程表示的模型设计反馈控制器的方法-极点配置/全状态反馈。在工业场景中,极点配置的应用并不多;反之,LQR或H infinity等方法则应用较为广泛。不过,极点配置能让你更好地理解使用状态空间方程进行反馈控制的一般方法。”
01
—
什么是极点配置
极点配置(Pole Placement)是控制理论中的一种设计方法,用于通过适当选择控制器增益,使得闭环系统的极点(也即系统特征方程的根)位于预定的位置,从而达到所需的动态性能和稳定性要求。极点的位置直接影响系统的响应特性,如稳定性、速度、阻尼等。
首先,我们有一个输入为 u、输出为 y 的plant,目标是开发一个反馈控制系统,将输出达到某个期望值。比较常用的一种方法是将输出y与参考信号u进行比较,以得到控制误差。然后开发一个控制器,根据该误差项生成plant的输入信号,目的是将误差降至零。这是在开发 PID 控制器时会看到的反馈系统结构。

但极点配置是以不同的方式来解决控制跟随问题。我们来看另一种控制框图:Plant不反馈输出y,而是反馈状态向量 x 中每个状态变量的值。然后,将状态向量乘以一个由不同增益值组成的矩阵。然后将结果减去缩放的参考信号,并将此结果作为输入直接输入Plant。
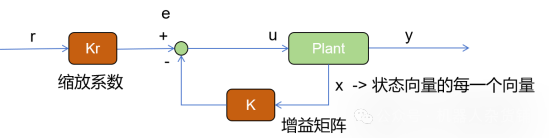
在这个反馈结构中,由Kr和K组成的部分就
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2011
2011

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









