






“ D-H(Denavit-Hartenberg)模型是一种用于描述和分析机器人连杆及其运动的方法。它通过一组标准化的参数和变换矩阵,简化了机械臂的正向和逆向运动学计算。D-H参数表述了各个连杆之间的几何关系,使得复杂机械臂的运动学分析变得更加系统和便捷。”
01
—
什么是DH模型
今天来介绍下机器人运动学建模常用到的DH模型。
D-H(Denavit-Hartenberg)模型是一种用于描述和分析机器人连杆及其运动的方法。它通过一组标准化的参数和变换矩阵,简化了机械臂的正向和逆向运动学计算。D-H参数表述了各个连杆之间的几何关系,使得复杂机械臂的运动学分析变得更加系统和便捷。
02
—
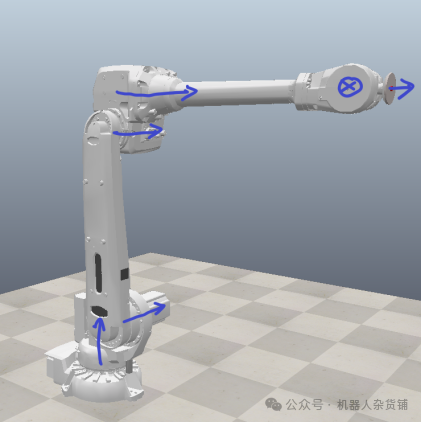
工业六轴机器人DH模型建模
我们可以根据D-H方法,将模型建立过程总结为以下步骤:
步骤1:确定并标记关节轴 (z_0, ..., z_{n-1})。
步骤2:建立基坐标系。将原点设置在 (z_0) 轴上的任意位置。(x_0) 和 (y_0) 轴可以方便地选择以形成一个右手坐标系。
步骤3:确定原点 (o_i),使其位于 (z_i) 和 (z_{i-1}) 的公共垂线上。如果 (z_i) 与 (z_{i-1}) 相交,则原点(o_i)为两者交点。如果 (z_i) 和 (z_{i-1}) 平行,则将 (o_i) 置于 (z_i) 上的任意位置处。
步骤4:沿 (z_{i-1}) 和 (z_i) 之间的公共垂线方向通过 (o_i) 确定 (x_i),或者如果 (z_i) 与 (z_{i-1}) 相交,则沿 (z_{i-1} - z_i) 平面中的法线方向确定 (x_i)。
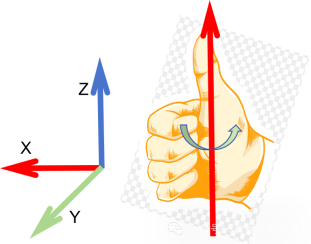
步骤5:根据右手坐标系确定 (y_i)。
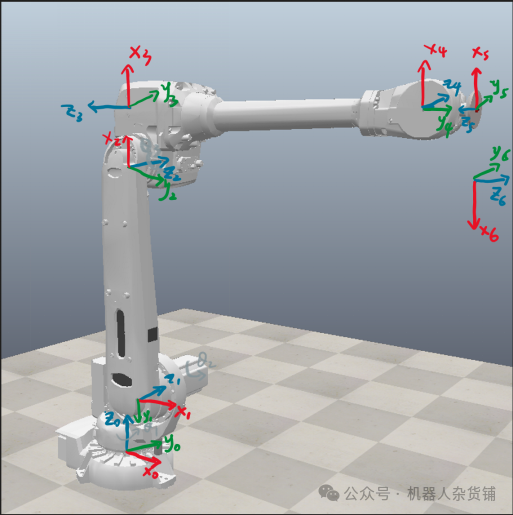
步骤6:建立末端执行器坐标系 (o_n,x_n,y_n,z_n)。
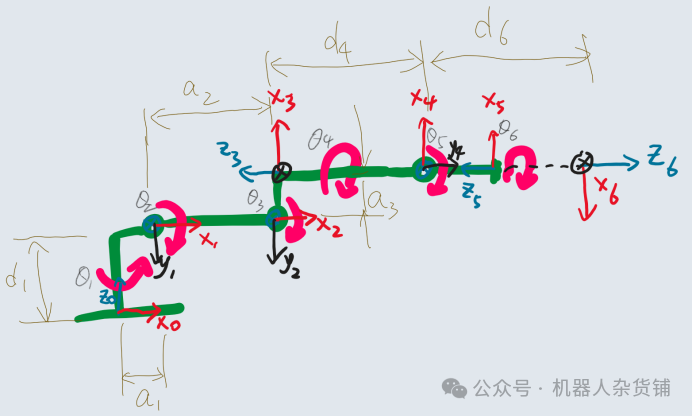
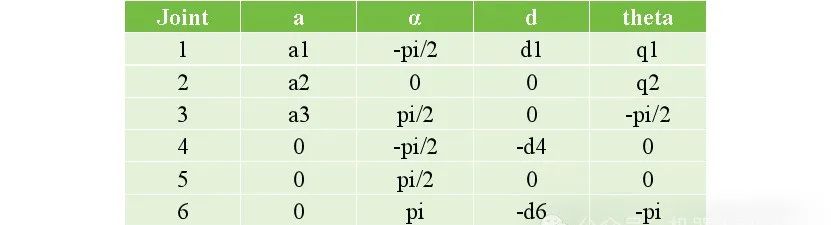
步骤7:创建连杆参数表 (a_i, d_i, \alpha_i, \theta_i)。
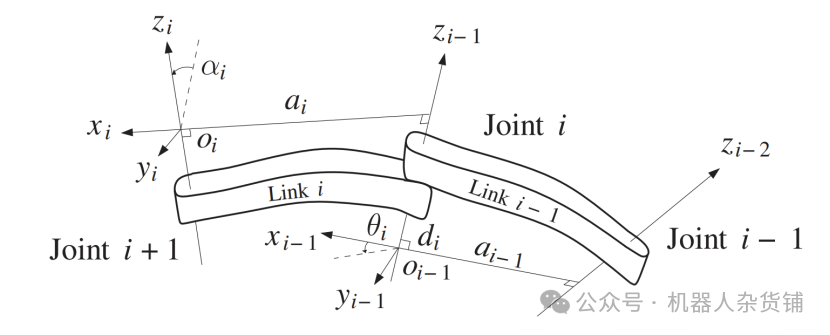
-
连杆长度(a_i):沿着xi方向指向,从(z_{i-1})移动到z_i的距离。也即公垂线的长度
-
关节偏距(d_i):以zi-1轴指向为正,从(x_{i-1})移动到 (x_i)的距离。若关节是移动关节,则 (d_i) 是变量。
-
连杆转角(alpha_i):从 (z_{i-1}) 旋转到 (z_i) 的角度,绕(x_i)轴正向旋转为正。
-
关节角(theta_i):从(x_{i-1})旋转到 (x_i)的角度,绕(z_i)正向旋转为正。
根据上述规则,可建立DH参数表如下:
步骤 8:将上述参数下面公式得到齐次变换矩阵Ai。
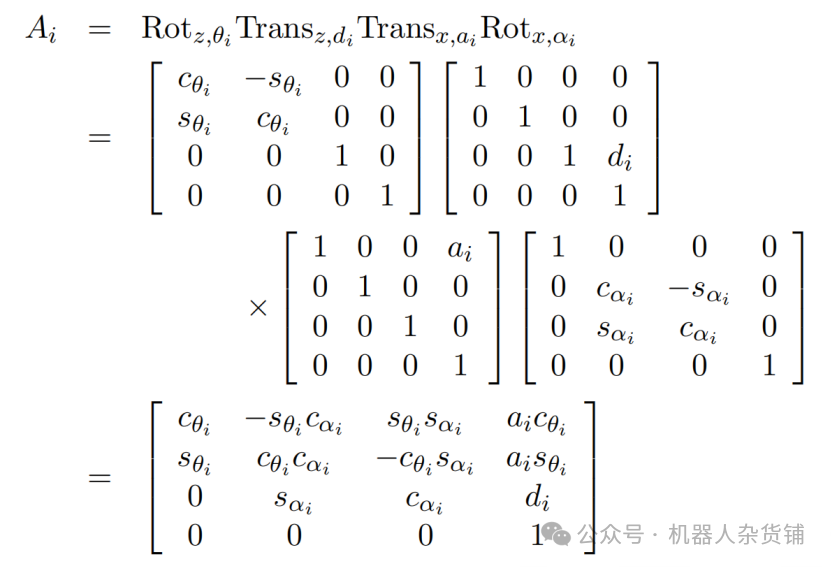
步骤 9:将各齐次变换矩阵连乘,则得到在世界坐标系表示下的工具坐标系的位置和方向。
![]()
03
—
Matlab Robotics Toolbox演示
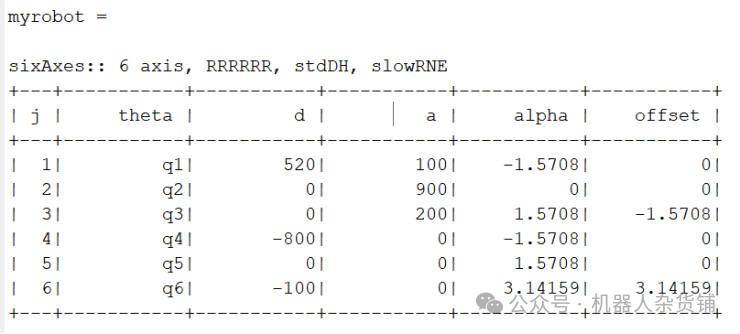
根据上述过程建立的DH模型,可以用Matlab代码实现如下:
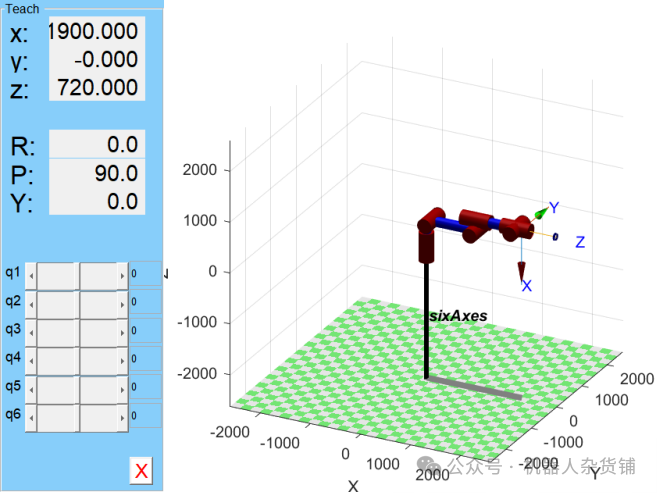
clear all;close all;dhparams =[100 -pi/2 520 0900 0 0 0200 pi/2 0 -pi/20 -pi/2 -800 00 pi/2 0 00 pi -100 pi];for i = 1 : length(dhparams(:,1))L(i) = Link('revolute', 'd', dhparams(i,3), 'a', dhparams(i,1), 'alpha', dhparams(i,2),'offset', dhparams(i,end),'standard');endmyrobot= SerialLink(L, 'name', 'sixAxes');myrobot.displaymyrobot.teach;theta = deg2rad([-10,-90,-90,-20,10,10])pose = myrobot.fkine(theta).T;
在matlab中建立的六轴机器人模型如下:















 5817
5817

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









