







目录
二、贪婪算法(贪婪最佳优先搜索)greedy best-first search (GBS)
写在前面
我们之前几篇博客都是在讨论无信息搜索,包括深度优先、广度优先、代价一致等。我们这个内容主要讨论什么是启发式搜索和启发式函数,介绍两个比较常见的贪婪算法和A*搜索算法。并且告诉大家怎么才可以选择一个更好的启发式函数。最后是图搜索中的应用部分。
一、启发式搜索和启发式函数
百科:启发式搜索(Heuristically Search)又称为有信息搜索(Informed Search),它是利用问题拥有的启发信息来引导搜索,达到减少搜索范围、降低问题复杂度的目的,这种利用启发信息的搜索过程称为启发式搜索。
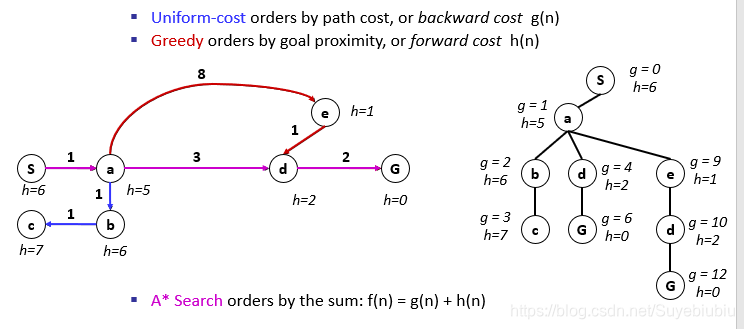
启发式搜索的节点一般是基于f(n)来进行扩展的,我们如果了解无信息搜索中代价一致算法(UCS)的话,UCS中也有一个g(n)。启发式搜索中是通过f(n)被选择性扩展(一般使用优先队列),一致代价搜索中使用g(n)来选择性扩展(也是优先队列)。但是启发式搜索中f(n)含义要比g(n)丰富,g(n)仅仅表示从当前节点到下一个节点的开销,但是f(n)可以表示从当前节点到目标节点的估计。
启发式函数(对于大多数最佳优先搜索):h(n)=节点n到目标节点的最小代价路径的代价估计值
启发式搜索:采用了f(n)(即启发式函数)的搜索策略。
二、贪婪算法(贪婪最佳优先搜索)greedy best-first search (GBS)
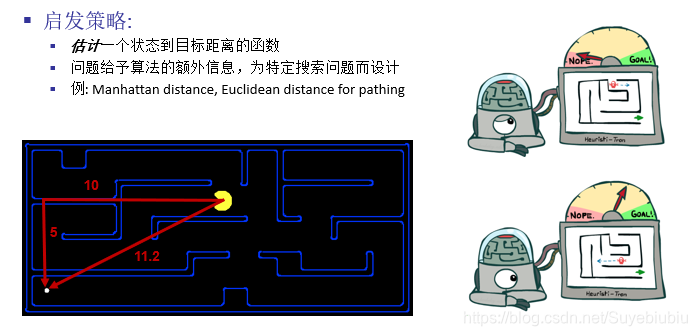
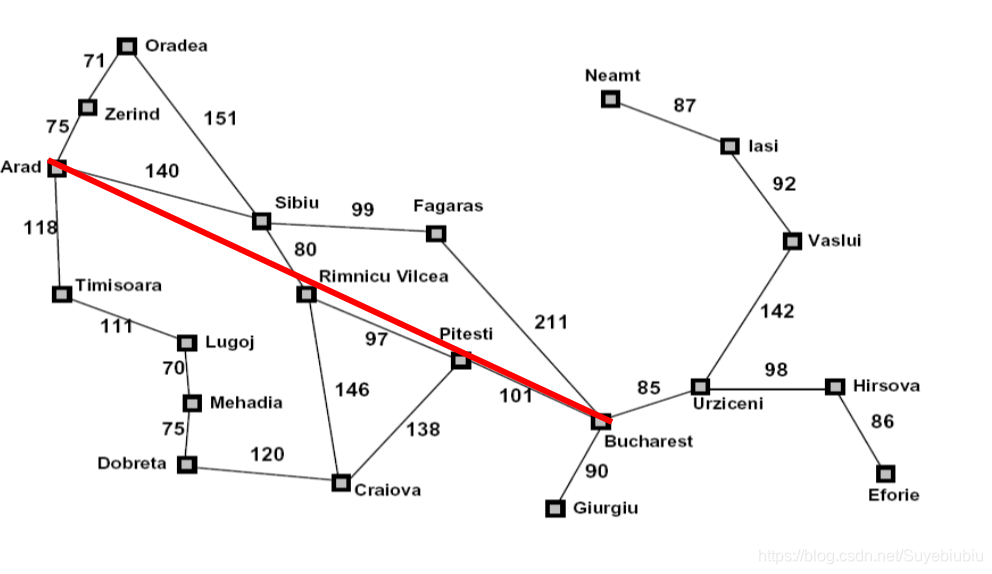
贪婪算法的设计目的就是想要从当前节点扩展离目标节点最近的一个节点。这个算法只用到了最简单的启发式函数f(n)=h(n),在罗马尼亚问题中,使用的是当前地点到目的地的直线距离(这个信息不能由问题本身的描述计算得到,而且这个信息是有用的——因为和实际路程相关,所以是一个有用的启发式),在此问题中,GBS搜索代价最小,但是不是最优。
GBS可能陷入死循环,但是它在有限状态空间的图搜索下是完备的,其他情况则不是。其时间和空间复杂度都是 ,其中m是搜索空间的最大深度。
,其中m是搜索空间的最大深度。
三、A*搜索(结合UCS和GBS)
A*搜索不同于贪婪算法,贪婪算法仅仅利用了启发式函数h(x),A*算法结合了代价一致算法UCS和贪婪算法的优点。A*算法可以看到到达此节点已经花费的代价( g(x) ),A*搜索的启发式函数变为了f(n)=g(n)+h(n)。整体来说,A*算法既是完备的也是最优的。
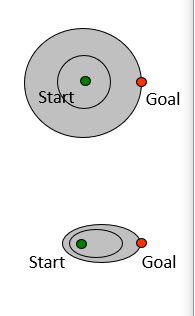
那么我们可以探讨下,代价一致搜索和A*搜索有啥区别呢?我们通过观察下图可以看出,代价一致搜索在所有方向上是等可能的扩展,而A*搜索方式主要是朝着目标扩展,而且可以保证最优性。启发函数越接近真实的耗散,将扩展越少的节点,但通常会在每个节点计算启发函数本身时有更多的计算。
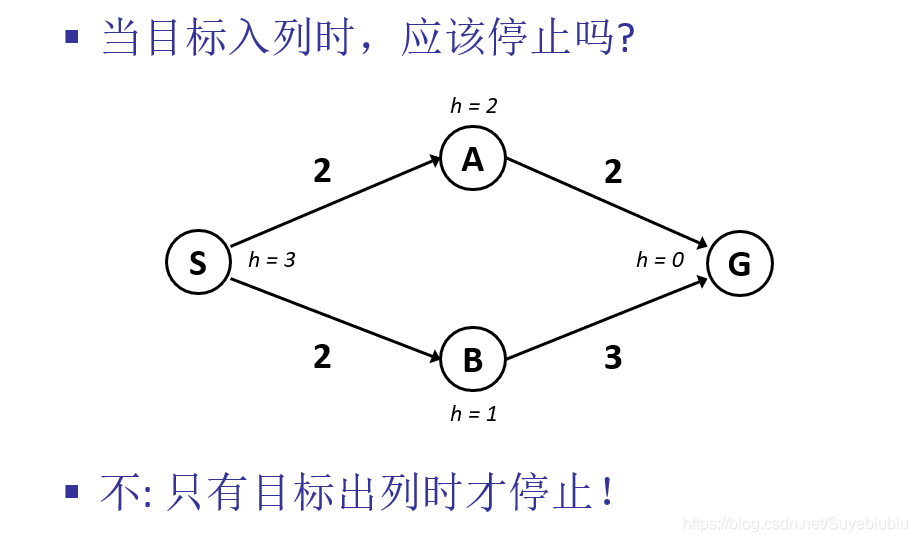
A*搜索算法结束的条件是什么?
 怎么判证明A* 树搜索的最优性?(这个容易出证明题)
怎么判证明A* 树搜索的最优性?(这个容易出证明题)
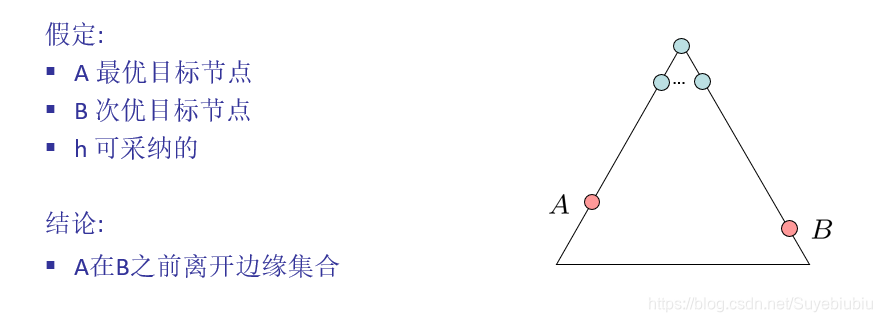
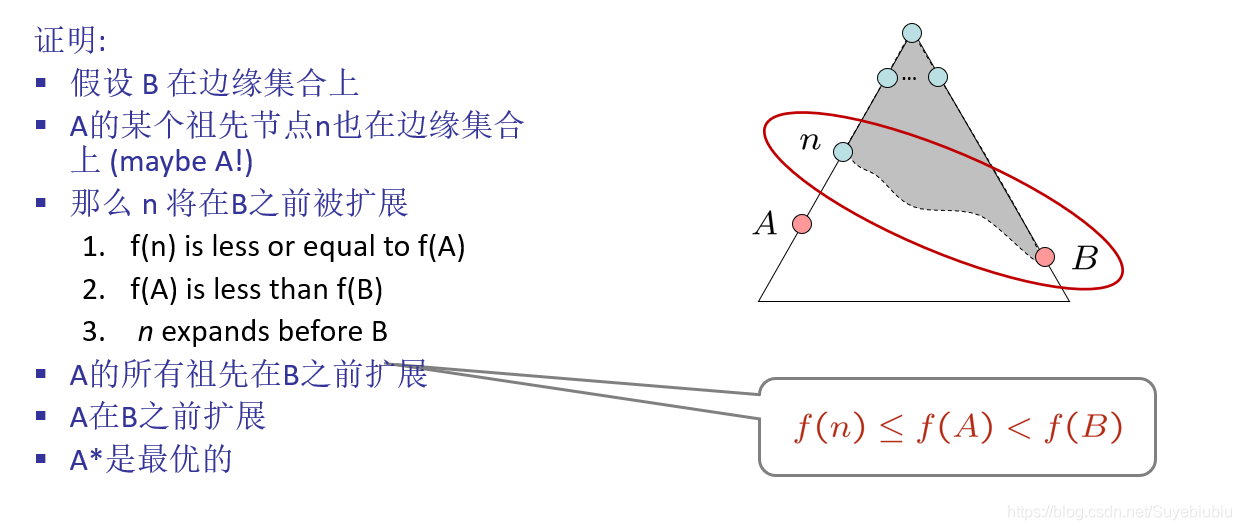
四、怎么选择一个好的启发式函数
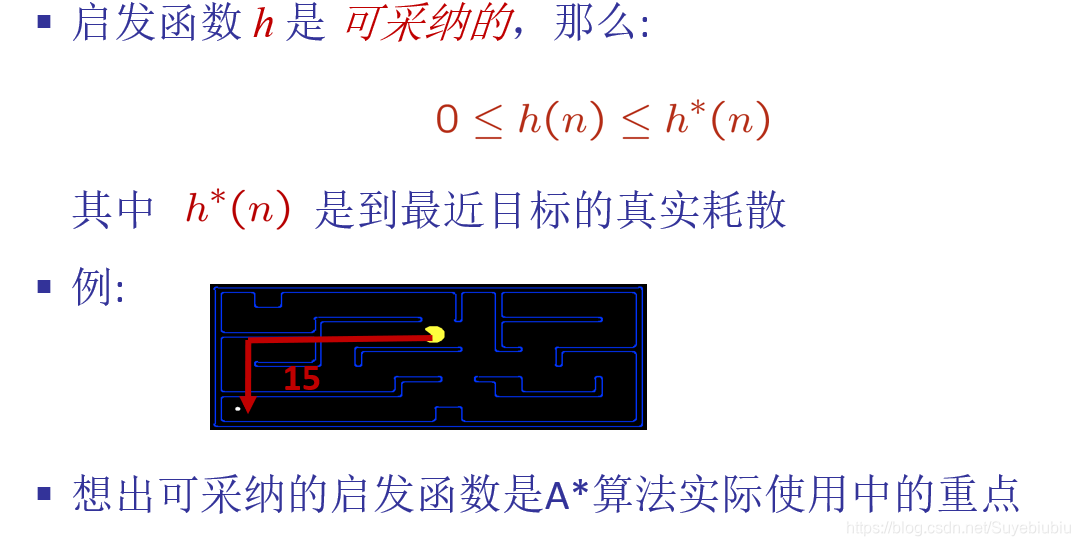
其实我们最大问题并不是理解启发式函数,而是怎么去想出最好的可采纳的启发函数。通常情况下可采纳启发函数都是松弛问题的解的耗散问题。其实不能被采纳的启发函数也不是一无是处,常常也是非常有用的。
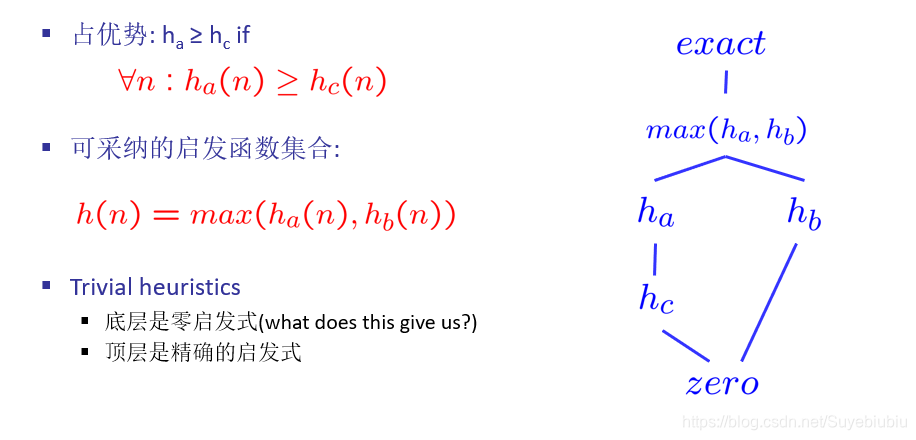
优势可以直接转化为效率:使用ha的A*算法绝不会比使用hc扩展更多的节点。
论证:每个f(n)<C*的节点都会被扩展,那么h(n)<C*-g(n)的节点必将被扩展。ha>=hc,那么每个被使用ha的A*算法扩展的节点必定也会被使用hc的A*所扩展,而hc还可能引起其他节点的扩展。
因此,使用值更高的启发函数总是更好的。前提可采纳的启发函数


















 1019
1019

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









