






 本文详细介绍了如何使用西门子1200PLC的FB284功能块控制V90伺服和相机角度,以及通过DP通讯控制FANUC机器人。提供完整的PLC程序和教程,适合初学者入门学习。
本文详细介绍了如何使用西门子1200PLC的FB284功能块控制V90伺服和相机角度,以及通过DP通讯控制FANUC机器人。提供完整的PLC程序和教程,适合初学者入门学习。
西门子1200走总线FB284控制3台V90伺服和相机调整角度,DP通讯控制FANUC机器人,程序简单明了,适合初学者入门,赠送博途FB284功能块入门使用手册。
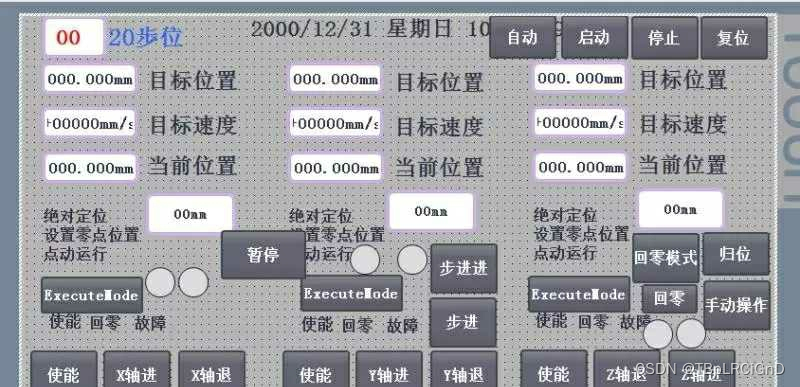
PLC程序带完整的注解和触摸屏程序。
西门子1200走总线FB284控制3台V90伺服和相机调整角度,DP通讯控制FANUC机器人,程序简单明了,适合初学者入门,赠送博途FB284功能块入门使用手册。
在现代工业自动化领域,PLC(可编程逻辑控制器)被广泛应用于各种控制系统中,其灵活性和可编程性使其成为工程师们解决各种复杂问题的得力工具。而西门子1200系列PLC作为其中的佼佼者,以其高性能和稳定性备受工程师们的喜爱。
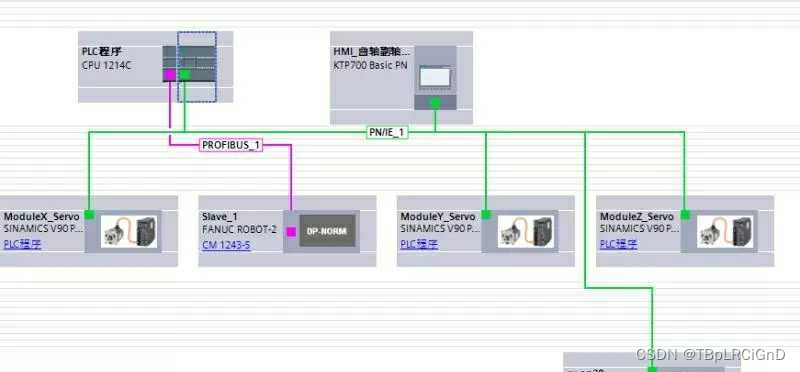
本文将围绕着西门子1200走总线FB284控制3台V90伺服和相机调整角度,DP通讯控制FANUC机器人的这个实际应用场景展开讨论。首先,我们将详细介绍西门子1200走总线FB284的基本原理和功能。接着,我们将探讨如何利用该功能来控制3台V90伺服和相机实现角度调整,并通过DP通讯控制FANUC机器人。最后,我们将展示一套完整的PLC程序,包括注解和触摸屏程序,供初学者学习和参考。
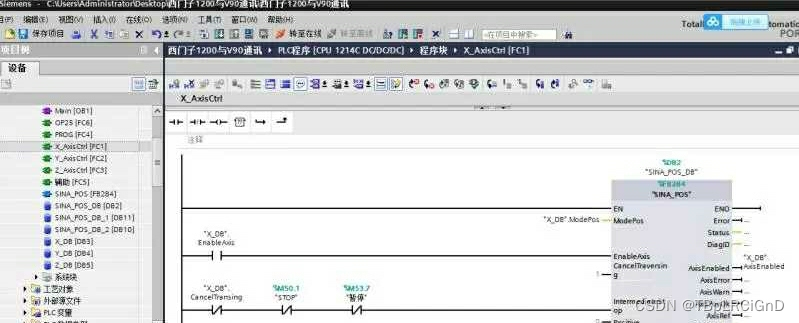
首先,我们来介绍西门子1200走总线FB284的基本原理和功能。走总线是一种常用的控制方式,它可以通过总线接口和其他设备进行通讯和数据交换。FB284是西门子1200的一个功能块,它具有走总线的特性,可以实现与其他设备的通讯。通过使用FB284,我们可以方便地与V90伺服和相机进行数据交互,实现对其角度的调整。
接下来,我们将探讨如何利用西门子1200走总线FB284来控制3台V90伺服和相机。V90伺服是一种常用的电机控制设备,可以实现高精度的运动控制。通过与V90伺服的通讯,我们可以实时获取其角度信息,并根据需要进行调整。相机调整角度是一项常见的任务,它可以通过图像信息识别和分析来实现对目标物体的准确定位。通过与相机的通讯,我们可以获取相机拍摄的图像数据,并根据其分析结果进行角度调整。通过使用西门子1200走总线FB284,我们可以轻松地实现对3台V90伺服和相机的控制,从而实现对角度的精确调整。
同时,我们还可以利用DP通讯来控制FANUC机器人。DP通讯是一种用于工业自动化领域的通讯协议,可以实现PLC与外部设备的数据交换。FANUC机器人是一种常见的工业机器人,
相关代码,程序地址:http://lanzoup.cn/654623456931.html


















 1859
1859

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









