






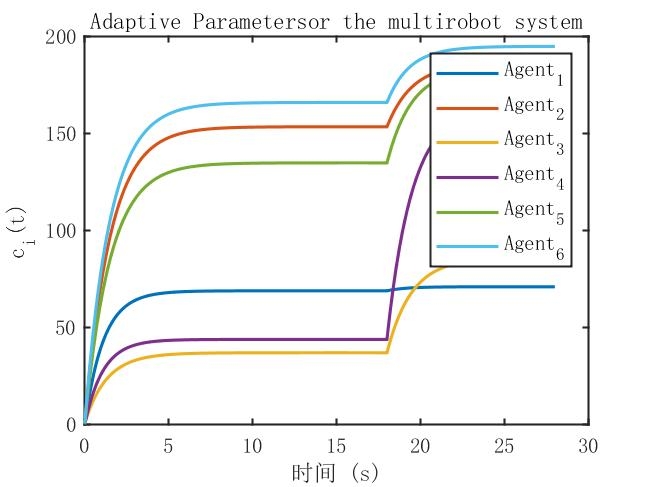
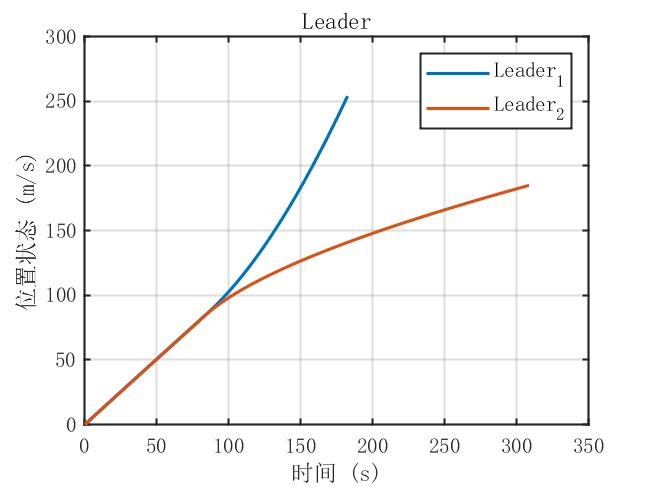
有向图,时变多智能体系统 MASs,分布式自适应跟踪,分组编队控制,Matlab脚本,Matlab脚本数值仿真实验。
仅
ID:373999668130101691
爱_会消失吗

有向图,时变多智能体系统 MASs,分布式自适应跟踪,分组编队控制,Matlab脚本,Matlab脚本数值仿真实验。
仅
ID:373999668130101691
爱_会消失吗
 739
3562
745
739
3562
745

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















