






目录
1.3.1精密单点定位技术PPP(Precision Point Position)
1.GNSS基础
1.1GNSS接收机定位原理
GNSS定位首先由卫星在某一时刻发出信号,此时刻可称为发射时刻,而后本地的接收机获取相关峰,也就是找到输入信号的相位,提取此时刻为发射时刻。而接收机的时间与此发射时刻就有一个差值,可记为,称作传播时间。此时间乘以光速即为接收机和卫星的距离。假设接收机时间已知,用上述办法算出接收机和卫星之间的距离,再利用导航电文和收到时间求出卫星的位置,此时以卫星为圆心,距离为半径画圆,如果接收机能收到三颗卫星的信号,那么理论上就可以得到接收机的位置了。
需要说明的是,接收机里记录的真实时间我们其实是无法得知的,因此就需要假设一个接收机时间,将真实的接收机时间减去假设接收机时间可得钟差Δt。一般用最晚的发射时刻作为接收机的接收时间,且以假想的接收时间减去发射时刻再乘以光速所得的距离并不是真实距离,而是一种伪距。
载波相位也可以用于定位,但载波和伪随机序列有很大的区别,就是载波的每个周期长得一模一样,如果想要定位测量必须计算出卫星的信号是第几个周期,之后用周期乘以波长即为距离。不过相对于伪距计算,这其中会涉及到整周模糊度的计算,而每颗卫星的整周模糊度都是不同的,这就给计算带来了极大的困难。
这里提到了整周模糊度的概念,百度百科概念为:整周模糊度(ambiguity of whole cycles)又称整周未知数,是在全球定位系统技术的载波相位测量时,载波相位与基准相位之间相位差的首观测值所对应的整周未知数。自我理解就是卫星信号发出来时的载波相位与他设定的基准相位之间到底差了几个整数周期。
还有一个比较重要的观测量,多普勒观测量。在发射端和接收端发生相对运动时,接收端收到的信号频率和发射端发出的信号频率会产生一个差值,这个值就是多普勒观测值。利用多普勒观测值求解距离时的方程即为伪距方程的一阶导数,需要用到接收机和卫星的速度及二者的钟差来求解。利用伪距我们可以计算出最后的位置与时间,但是由于接收机的时间是不可知的,因此解出时间就需要四颗卫星的观测量解四个方程从而得到接收机的三维坐标和时间。
1.2GNSS定位模式简述
a.SPP(Single Point Position)单点定位模式。
通常使用伪距量位置,用多普勒算速度,用载波进行伪距的平滑。这种定位方式在空旷处的误差<5m,在有多径干扰时误差可能会达到50m以上。
b.DGNSS差分全球导航卫星系统定位(差分定位)。
简单地说,就是把已知的测定点作为差分基准点,在差分基准点安装基准GNSS接收机, 并用该接收机连续地接收GNSS 卫星定位数据,经解算形成定位计算值,将基准点位置的计算值与已知位置进行比对,求解出实时差分修正值,以广播或专用数据链的传输路径,将差分修正值传送给定位用户,用户以此修正值来修正其GNSS定位值,得到更高精度的DGNSS定位值。同样,DGNSS也无法消除多径误差,仅可修正系统误差。
DGNSS定位可以根据DGNSS基准站发送信息的方式分成三类,这三类差分方式的工作原理均相同,不同点在于其发送的改正数具体内容不一样,定位精度也有差距。
位置差分:
这是一种最简单的差分方法,任何一种GNSS接收机均可改装和组成这种差分系统。
安装在基准站上的GNSS接收机观测4颗卫星后便可进行三维定位,解算出基准站的坐标。由于存在着轨道误差、时钟误差、大气影响、多径效应以及其他误差,解算出的坐标与基准站的已知坐标是不一样的,存在误差。基准站利用数据链将此改正数发送出去,由用户站接收,并且对其解算的用户站坐标进行改正。最后得到的改正后的用户坐标已消去了基准站和用户站的共同误差,例如卫星轨道误差、大气影响等,提高了定位精度。以上先决条件是基准站和用户站观测同组卫星的情况。位置差分法适用于用户与基准站间距离在100km以内的情况。
伪距差分:
伪距差分是目前用途最广的一种技术。几乎所有的商用差分GPS接收机均采用这种技术。
在基准站上的接收机要求得到它至可见卫星的距离,并将此计算出的距离与含有误差的测量值加以比较。利用滤波器将此差值滤波并求出其偏差。然后将所有卫星的测距误差传输给用户,用户利用此测距误差来改正测量的伪距。最后,用户利用改正后的伪距来解出本身的位置,就可消去公共误差,提高定位精度。与位置差分相似,伪距差分能将两站公共误差抵消,但随着用户到基准站距离的增加又出现了系统误差。用户和基准站之间的距离对精度有决定性影响。
载波相位差分:测地型接收机利用GPS卫星载波相位进行的静态基线测量获得了很高的精度。但为了可靠地求解出相位模糊度,要求静止观测一两个小时或更长时间。这样就限制了在工程作业中的应用。于是探求快速测量的方法应运而生。例如,采用整周模糊度快速逼近技术(FARA),使基线观测时间缩短到5分钟,采用准动态(stop and go),往返重复设站(re-occupation)和动态(kinematic) 等来提高GPS作业效率。这些技术的应用对推动精密GPS测量起了促进作用。但是,上述这些作业方式都是事后进行数据处理,不能实时提交成果和实时评定成果质量,很难避免出现事后检查不合格造成的返工现象。
1.2.1基本观测值与误差分析
卫星导航定位中,一般将导航卫星的位置作为已知值,接收机位置作为待求参数,采用单程被动式测距的方法进行导航定位。
1.2.1.1基本观测量
根据传播信号的类型,可将基本观测值分为4类:
(1)测码伪距观测值;
(2)载波相位观测值;
(3)由积分多普勒计数得出的伪距差;
(4)由干涉法测量得出的时间延迟。
目前通常采用第1和2类观测值。这两类都受到时钟误差(卫星钟和接收机误差)、大气延迟(对流层延迟和电离层延迟)等影响。观测值的等效距离并不等于卫星至接收机的真实几何距离。
测码伪距观测值
通过测量信号传播的时间延迟来获得卫星至接收机间的几何距离。准确来说,是信号发射时的卫星位置至信号接收时刻接收机位置之间的几何距离。
获取过程:卫星和接收机上均安置了计时钟,理论上两者采用相同的时间系统,两个时钟的时间读数在同一时刻是一致的。卫星在卫星钟的控制下产生测距码信号,同时接收机在接收机钟的控制下产生相同的测距信号,称为复制码。不考虑钟差情况下,卫星产生的测距码和接收机产生的复制码在同一时刻的码元是完全相同的。卫星产生的测距码经过空间传播到达接收机,由于受到传播时间延迟的影响,相比于接收机产生的复制码,到达接收机的测距码已存在滞后后移。将卫星测距码与接收机之间的复制码比对,利用时间延迟器调整复制码,即平移复制码使之与来自卫星的测距码之间的相关性达到最高。延迟器记录的平移量Δτ就对应于卫星信号传播的延迟时间Δt。将延迟时间乘以真空中的光速,即得到了测码伪距观测值。
但是在实际情况下,存在钟差。钟读数与理论不一致,将导致卫星与接收机产生的测距码并非严格同步,根据钟面读数测定的传播时间并不准确。
另外,理论上卫星信号和复制信号应该完全一致。但实际上,由于受到噪声等的影响,两者波形会产生一些差异。因此卫星测距码与接收机复制码的比对过程,是寻求两者最大相关性来确定延迟时间的过程。相关性大小根据相关系数R来计算,公式如下:

T为积分间隔,us(t-Δt)为来自卫星经过传播时间![]() 的测距码,uc(t-Δτ)则是经过延迟器延迟时间Δτ的接收机复制码。R取最大时所对应的Δτ则为确定的延迟时间。
的测距码,uc(t-Δτ)则是经过延迟器延迟时间Δτ的接收机复制码。R取最大时所对应的Δτ则为确定的延迟时间。
测码伪距的精度与码元宽度(即测距码的波长)有关。越短越强!
载波相位观测值
载波是一种没有任何标记的余弦波,用于调制测距码和导航电文。但本身,载波相位也可以用于测量距离。在载波相位传播过程中,时间变化或空间距离变化都将导致载波相位发生变化。
1.2. 2单点(绝对)定位
理想状况下,地面观测者可利用测量其到三个不同坐标位置已知的空间点的距离来确定观测者的位置,也就是测边交会定位。利用该方法,使用一台GNSS接收机,接收来自多颗卫星的同一时刻或不同时刻的卫星信号,测量卫星至接收机之间的几何距离,利用距离交会的方法独立确定接收机在地球坐标系中的绝对坐标的定位方法,称单点定位或绝对定位。
根据所采用的观测值类型,可将单点定位分为标准单点定位和精密单点定位。前者是以测距伪码作为观测值;后者是以载波相位作为观测值,并采用IGS等机构提供的精密星历和钟差计算卫星位置和卫星钟差来进行高精度绝对定位的一种定位方式。
根据接收机状态,绝对定位又可分为静态和动态。
优点:只需一台接收机、数据处理简单、实时解算、成本低廉。
缺点:误差大、精度低。
1.2.2.1 绝对定位的观测方程
(1)标准单点定位观测方程
观测值:测码伪距观测值或相位平滑伪距观测值。
数据处理默认方式:发射时刻卫星位置采用广播星历计算,作为已知值;卫星钟差和卫星硬件延迟采用广播星历计算,并忽略卫星钟差残余误差的影响;对流层延迟采用经验模型计算;电离层延迟采用经验模型计算或双频方法消除;忽略接收机硬件延迟和多路径效应影响。
单频测码伪距观测方程为:

双频消电离层的测码伪距观测方程为:
 PIF是利用无电离层组合(利用电离层延迟与载波频率平方成反比的特性),通过组成组合观测值来消除电离层延迟的影响。伪距观测值常用以下组合:
PIF是利用无电离层组合(利用电离层延迟与载波频率平方成反比的特性),通过组成组合观测值来消除电离层延迟的影响。伪距观测值常用以下组合: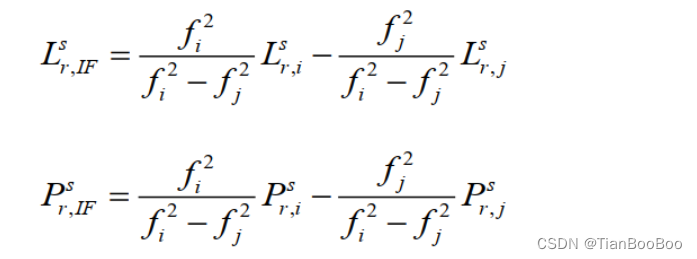
注:(xs,ys,zs)为信号发射时刻的卫星轨道坐标;(x,y,z)为信号接收时刻的测站坐标(静态定位时,参数相同;动态定位时,参数随历元变化);dts为卫星钟差;dtr为接收机钟差(静态和动态定位中,参数都随历元变化);dρ为卫星星历误差;I为电离层误差;T为对流层误差;B为卫星硬件延迟;b为接收机硬件延迟;c为光速。
标准单点定位的未知参数仅包含测站坐标参数和接收机钟差参数,每一历元的未知参数不会超过4个,因此只需观测4颗或4颗以上的卫星就能解算测站坐标。
(2)精密单点定位观测方程
精密单点定位采用载波相位观测值进行定位。
单频精密单点定位观测方程如下:

双频精密单点定位观测方程如下:
 λ为载波波长;N为整周模糊度;m为对流层投影函数;Tzpd为天顶对流层延迟参数;
λ为载波波长;N为整周模糊度;m为对流层投影函数;Tzpd为天顶对流层延迟参数;
从单频精密单点定位的观测方程知,定位需求解参数增加了整周模糊度和对流层延迟参数。天顶对流层延迟较固定,通常1~2h才估计一次。为了分析模糊度参数对定位解算的影响,忽略天顶对流层延迟参数,此时每增加一颗卫星就将增加一个模糊度参数。
若采用单历元观测值,模糊度参数未知,未知数个数大于观测值个数,无法求解。
若采用多历元观测值,根据卫星未失锁情况下模糊度参数随历元变化保持不变的特点,未知数个数为nt+ns+3个(nt=N模糊度,ns=每次历元的接收机钟差dtr,3则为测站坐标),观测值个数为ntns个(nt个历元,每个历元ns个卫星,那总的观测值不就是两者乘起来嘛),此时观测值个数≥未知数个数,则可求解,这一过程是模糊度确定的过程,将其称为“初始化”。
当模糊度参数确定后,之后若不失锁,则模糊度参数保持不变,可视为已知值。(此时之后便类似标准单点定位,因为N已知,Tzpd忽略嘛)
1.2.2.2 单点定位的数据处理
绝对定位数据处理中,卫星坐标均由卫星星历计算的卫星坐标提供,无地面坐标已知点参与计算。因此绝对定位中计算得到的测站坐标与卫星星历采用坐标系一致。(北斗采用的CGCS2000)
(卫星导航定位原理,黄丁发,武汉大学出版社,第三版,P161-P166,P173-177)
(1)标准单点定位数据处理
先将观测方程线性化,将测站坐标近似值用泰勒展开。
误差处理:卫星坐标采用广播星历计算;忽略星历误差和观测值噪声的影响;卫星钟差通过广播星历改正;接收机钟差作为待估参数;对单频,I采用模型改正,双频则消除了I;对流层误差T利用各种经验模型改正;B则利用广播星历提供数据进行改正;b则忽略。
(2)精密单点定位数据处理
详见1.3.1
1.2.3 差分(相对)定位
为了提高定位精度,通过在观测值间求差的办法,可有效消除参考站与流动站间的公共相关误差,实现了高精度的相对定位,因此称为差分定位。
概念:差分定位指使用两台以上的GNSS接收机作同步观测,其最基本情况是使用两台GNSS接收机,分别安置在两个测站上,并同步观测相同的GNSS卫星,以确定测站T1和T2在地固地心坐标系中的相对位置或坐标差(dx,dy,dz),T1-T2称为基线,坐标差称为基线向量。如果使用多台GNSS接收机安置在若干条基线上时,同步观测GNSS卫星,可以同步确定多条基线的基线向量。
在差分定位中,至少选一个测站作为参考站,参考站的坐标通常设定为已知值,若将T1设为基准站或参考站,则所获得的基线向量即为流动站T2相对于T1的坐标差,又称相对定位。
根据求差的对象不同,差分定位可分为位置域和观测值域差分两种。前者算法简单但精度低应用少,后者理论模型复杂、精度高、应用广泛。
1.2.3.1 差分定位的分类
根据基准站的布设数量和布设范围可分为单基准站差分、局域差分、广域差分。
单基准站差分是指仅通过一个基准站来确定差分改正数的差分定位方式。一般应用于精度要求高但相对较小的区域,且其定位精度会随着基线长度的增加而降低。
局域差分是指通过布设3个以上的基准站来确定用户改正信息的差分GNSS定位方式。其系统覆盖区域站间距可达70-100km。
广域差分GNSS则是在更为广阔的区域布设站网稀疏的多个基准站,实现服务区域更为广阔的差分定位。许多文献中常常根据差分改正数的计算方式来对局域和广域进行区分。
广域差分的进一步扩展或增强是WAAS广域增强系统。系统通过将差分改正信号经由地球同步卫星转发给用户的方式很好地解决了广域差分的数据通信问题,提高了广域差分技术的可用性和精度。即加了个地球同步卫星。
根据改正数计算方式可分为坐标域改正、距离(观测值域)改正、空间状态域改正。
坐标改正值 = 参考站计算坐标值 - 已知坐标值
坐标改正采用GNSS观测值计算的参考站坐标值与其已知坐标值相减,得到坐标改正值发送给流动站Δx,Δy,Δz等发送给流动站用户。
距离改正值 = 基准站至卫星距离观测值 - 已知卫星坐标至基准值已知坐标间距离
距离改正将基准站观测值与已知卫星坐标至基准站已知坐标的距离作差,将差值发送给流动站,用于对流动站的观测值进行改正。
空间状态改正值 = 多个参考站的用于估计区域各类误差随时空变化的观测值
空间状态域改正则是利用多个参考站的观测值来估计服务区域内各类误差随空间和时间变化的改正量或改正参数,并将这些改正的信息发布给用户,用户根据所处的位置和时间状态计算各类误差改正数,进行相应改正。空间状态域改正是广域差分所采用的改正方式。
1.2.3.2差分定位的方法
(1)坐标域差分
坐标域差分,是向用户发布坐标差值作为差分改正数的一种差分改正方式,称为坐标差分改正数(Δx,Δy,Δz),坐标差改正数为基准站的已知坐标于其实测坐标之差。用户接收机接收来自基准站接收机的坐标差改正数,采用绝对定位方式计算用户三维坐标,并利用改正数对其测定的三维坐标进行改正,进而求得精确坐标。
(2)观测值域差分
观测值差分是目前应用最广泛的技术。在基准站上利用已知的坐标及卫星星历确定的卫星位置求出站星之间的距离,将其与含有误差的伪距观测值进行比较,求得伪距差分改正数传输给用户,用户接收伪距差分改正数并对用户伪距观测值进行相应改正得到精确结果。
(3)广域差分
广域差分改正时,所提供的改正数并不是观测值误差的综合影响值,而是根据不同误差来源分类计算得到的差分改正数。
基准站对观测数据进行处理,对各项误差加以分离,建立各自的改正模型,将每一误差源的数值通过数据链传输给用户站,改正用户站的NGSS定位误差。
误差源模型主要包括电离层模型、对流层模型、卫星星历误差模型和卫星钟差模型等。
用户定位时,采用主站提供的区域电离层模型和区域对流层模型分别计算电离层改正量和对流层改正量,同时不再采用导航电文提供的星历和卫星钟差系数来计算卫星位置和卫星钟差,而是利用基准站区域精密定轨确定的精密星历来计算卫星位置,利用基准站提供的精密卫星钟差信息改正卫星钟误差。
1.2.3.3 静态相对定位原理
在差分定位中,载波相位相对定位是一种高精度差分定位方法,通常采用观测值域差分,以原始观测值进行处理。静态相对定位,由于接收机是固定不动的,这样便可能通过连续观测,取得丰富的多余观测数据,以改善精度。
相对定位的结果,是基线的三维向量(坐标差)。在静态相对定位中,若在仅有两台接收机的情况下,一般应考虑将单独测定的基线向量联结成向量网,以增强其几何强度,改善定位精度。
在有多台接收机同步观测的情况下,其构成的向量网络称为同步环。这种方式含许多检核条件,网的几何强度好,可以检验和控制多种误差的影响,从而可能会明显地提高定位的可靠性。
基本观测值组合为:单差、双差、三差
1.2.3.4 动态相对定位原理
动态相对定位,是将流动站接收机安置在运动载体上,两台接收机同步观测相同的卫星,以确定运动点相对于参考站的位置或轨迹。动态相对定位既可采用伪距观测量,也可以采用相位观测值。不同之处在于后者存在整周模糊度。
动态相对定位通常分为实时处理和测后处理两种模式。
若是将参考站伪距观测数据(或改正数)通过无线数据链路发送到流动站接收机,流动站接收机就可以实现实时伪距差分定位(RTD)
若是将参考站载波相位观测数据(或改正数)通过无线数据链路发送到流动站接收机,流动站接收机在确定(或称固定)初始模糊度后,就可以实现实时动态相对定位(RTK)
1.3 GNSS定位新发展技术
1.3.1精密单点定位技术PPP(Precision Point Position)
(卫星导航定位原理,黄丁发,武汉大学出版社,第三版,P173-177)
概念:指的是利用全球若干地面跟踪站的GNSS观测数据计算出的精密卫星轨道和卫星钟差,对单台GNSS接收机所采集的相位和伪距观测值进行定位解算,获得待定点高精度的ITRF框架坐标的一种定位方法。
PPP技术集成了GNSS标准单点定位和GNSS相对定位的技术优点, 克服了各自的缺点, 已发展成为一种新的GNSS定位方法。PPP技术无需用户自己设置地面基准站、单机作业、定位不受作用距离的限制、作业机动灵活、成本低, 可直接确定测站在国际地球参考框架 (ITRF) 下的高精度位置坐标。
PPP一般采用非差观测模型, 能同时精确估计测站在ITRF框架下的绝对坐标、接收机钟差以及绝对天顶对流层延迟及其水平梯度、信号传播路径上的电离层延迟等参数,与相对定位的双差模型相比, PPP在广域精密定位、地震监测、水汽反演和电离层监测等方面应用具有突出优势。因此, PPP在大范围移动测量、低轨卫星定轨、精密授时、大气科学、地球动力学等诸多方面具有独特的应用价值。鉴于PPP技术自身的优势和特点, 近年来, PPP技术逐渐发展成为卫星导航定位技术领域的热点研究方向之一, 正蓬勃发展, 并显现出了广阔的应用前景。
PPP一般采用单台双频GNSS接收机,利用IGS提供的精密星历和卫星钟差,基于载波相位观测值进行的高精度定位。观测值中的电离层延迟误差通过双频信号组合消除,对流层延迟误差通过引入未知参数进行估计。其观测方程如下:
lp为无电离层伪距组合观测值;lΦ为无电离层载波相位组合观测值;ρ为测站与卫星间的几何真实距离;c为光速;αi为无电离层组合模糊度(等效距离,不具有整数特性);M为投影函数;zpd为天顶方向对流层延时;εp和εΦ为两种组合观测值的多路径误差和观测噪声。
PPP计算主要过程包括:观测数据预处理、精密星历和精密差拟卫星钟合成轨道多项式、各项误差的模型改正及参数估计等。
固定解:当使用载波相位观测值定位的时候,会产生模糊度,模糊度理论上是整数。通过算法解出整数的模糊度后,定位精度大大提高,以此得到的结果。
浮点解:有的时候模糊度解不出整数所得到的解。
单点解:接收机未使用任何差分改正信息计算的3D坐标。
差分解:有信号,但由于各种原因,比如卫星数量太少或移动站位置太差,导致交汇数据精确度非常低,一般偏差有几米或者十几二十米。
1.3.2网络RTK技术(Network RTK)
RTK是一种利用GPS载波相位观测值进行实时动态相对定位的技术。进行RTK测量时,至少需配备2台GPS接收机,一台安装在基准站上,另一台在基准站附近进行实时相对定位,进而根据基准站的坐标求得自己的三维坐标。随着流动站与基准站之间的距离的增加,各种误差的空间相关性将迅速下降,因此在RTK测量中流动站和基准站之间的距离一般只能在15km以内。
通常把在一个区域内建立多个(一般为三个或三个以上)的GPS参考站,对该区域构成网状覆盖,并以这些基准站中的一个或多个为基准计算和发播GPS改正信息,从而对该地区内的GPS用户进行实时改正的定位方式称为GPS网络RTK,又称为多基准站RTK。
采用网络RTK技术时,需要在一个较大的区域内大体均匀地布设若干个基准站,基准站间的距离可扩大至50-100km,显然流动站到最近的基准站的距离可能大于15km,因此我们利用在流动站周围的几个基准站的观测值和已知的站坐标在解算,这样用户仍有可能获得厘米级的定位精度。
利用多基站网络RTK技术建立的连续运行参考站(Continuously Operating Reference Stations),缩写为CORS)已成为城市GNSS应用的发展热点之一。
(我们国家将CORS站囊括在地基增强技术里,嗯,博大精深啊)
虚拟参考站(VRS)系统
虚拟参考站技术是利用CORS网络,综合利用各个参考站的观测信息,通过建立精确的误差模型来修正距离相关误差,在用户站附近产生一个虚拟的参考站。
区域改正数(FKP)技术
区域改正数技术与VRS系统不同的是,只需要单向通信。即数据处理中心向区域内所有用户广播相同信息,不需要流动站向数据处理中心发送概略坐标,主参考站和流动站间的空间相关误差只能在流动站端生成。
主辅站(MAC)技术
主辅站技术与VRS和FKP技术不同在于,在尽可能减小数据传输量的同时,提供多个参考站观测数据,且以子网作为解算单元。子网中选定一个站作为主参考站(通常选几何中心),其他站作为辅参考站,辅站与主站相连形成星形网络。
1.4GNSS未来发展新技术(不全,批判地看)
(1)GNSS-R技术:是利用GNSS反射信号获取目标信息的一种方法。作为一种全新的遥感手段,可利用其测量海面高、土壤湿度、积血厚度等。
(2)GNSS掩星技术是通过在低轨卫星上安置GNSS接收机,接收因掩星事件产生的大气折射信号,以此反演大气参数。
(3)组合导航技术:多样化、集成化、智能化的导航系统形式。INS/GPS组合仍将是组合导航系统的首选。
(4)多频多系统联合定位技术:在复杂观测条件下,传统单系统双频导航定位往往面临可见卫星数不足,定位精度和可靠性差等问题。多频观测值的应用以及系统联合定位的实施将为用户提供更多的备选组合观测者,增加可见卫星数、增强卫星几何强度、减少或消除单系统导航定位产生的系统误差,从而提高定位精度及可靠性。这将逐渐成为主流的导航定位方式。
1.5 交会法测量原理
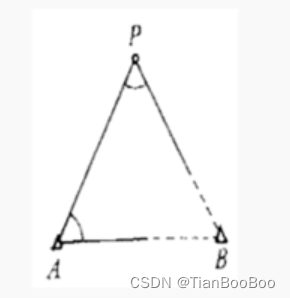
侧方教会法
A,P两点坐标已知,A(Ax,Ay),P(Px,Py)。通过观测∠B和AB距离,测定未知点B的平面坐标,这种方法称为侧方交会。如图所示:
前方交会法
在两个已知点以上分别对待定点相互进行水平角观测,并据已知点根的坐标及观测角值计算出待定点坐标的方法,称前方交会。(在已知点上设站)
后方交会法
仅在待定点上设站,向三个已知控制点观测两个水平夹角a、b,从而计算待定点的坐标,称为后方交会。
1.6 基线数据处理
1.6.1周跳探测与修复
如果接收机在整个观测时段中始终保持卫星信号锁定,则载波相位观测值是连续的。但当卫星信号被障碍物遮挡或受无线电干扰时,会发生短时间失锁,从而引起相位观测值的整周数发生跳变,这种现象称为周跳。
在GNSS定位中,同一观测时段延续的时间越长,产生周跳的可能性便越大。因此在观测成果的平差计算之前,必须对其中可能存在的周跳进行检验和修复。
检测周跳的原理与粗茶检测原理类似。目前有多种检测周跳的方法,其共同之处在于都是利用载波相位观测值在无周跳时应是一个连续的平滑序列的性质。
由于钟差影响,非差和单差观测量的平滑性均较差,而双差及三差观测量由于消除了许多公共系统误差而具有很好的平滑性,因而常用双差及三差观测序列来检测周跳。
周跳具有继承性,即从周跳发生历元开始,以后的所有历元的相位观测量都受到这个周跳的影响。因此在修复周跳时,应对周跳开始的所有历元进行修复。
常用的方法有多项式拟合法、卡尔曼滤波法、基于三差的选权迭代法等。
1.6.2整周模糊度的固定
2.GNSS各类技术应用
2.1室内定位
闫大禹,宋伟,王旭丹,胡子烨.国内室内定位技术发展现状综述[J].导航定位学报,2019,7(04):5-12.DOI:10.16547/j.cnki.10-1096.20190402.http://kns-cnki-net-s.vpn.swjtu.edu.cn:8118/kcms/detail/detail.aspx?dbcode=CJFD&dbname=CJFDLAST2019&filename=CHWZ201904002&uniplatform=NZKPT&v=ZWFdquhPK-liJ-hFPdq16aVRcNYnjJ6esWG-yEw0n7b6YjDuY0BvrmDq27m9K4XL
http://kns-cnki-net-s.vpn.swjtu.edu.cn:8118/kcms/detail/detail.aspx?dbcode=CJFD&dbname=CJFDLAST2019&filename=CHWZ201904002&uniplatform=NZKPT&v=ZWFdquhPK-liJ-hFPdq16aVRcNYnjJ6esWG-yEw0n7b6YjDuY0BvrmDq27m9K4XL该文章通过对国内几种主流室内定位技术的介绍,以及对不同场景下室内定位方案的分析,表明当前国内室内定位技术亟须进一步提升精度,探索新的室内定位技术、进一步发展多源定位信息融合技术以及建立室内定位性能评估体系是国内室内定位未来的发展方向。
室内定位技术分为 2 类:第一类为基于外置信源的室内定位技术,这类技术的实现依赖于外置信源,主要包括 WiFi、蓝牙、超宽带(ultra wide band, UWB)、蜂窝移动网络和伪卫星;第二类为基于天然信源的室内定位技术,这类技术仅依靠终端的传感器即可实现定位,包括惯性导航、地磁导航等。随着室内定位技术的不断进步,定位精度也逐渐提高到米级甚至亚米级,开始迈入消费级市场。
2.1.1基于外置信源的室内定位技术
(1)WiFi 定位技术
利用 WiFi 信号实现室内定位有 2 种方法,测距交汇法和指纹匹配法。
测距交汇法是指(通过信号衰减强度变化,测出3个以上接入点到接收机距离进而估算位置)利用信号强度衰减模型将 WiFi 信号从接入点到接收机的信号衰减强度转化为 2 者之间距离,采用三角定位法,根据 3 个以上接入点到接收机之间的距离约束对接收机的位置进行估算。该方法优点在于无需建立维护数据指纹库,且定位精度比指纹匹配法精度高;缺点在于信号强度衰减模型与室内环境强相关,由于室内环境复杂多变且非视距现象严重,很难获取准确的信号强度衰减模型。
指纹匹配法是(将环境划分网格,采集每个网格对应的信号特征,建立库,在用户需要定位时将其所在位置信号特征与库里的值比对,进而得到位置估计)将难以直接测量的位置信息和容易获取的信号特征(如无线信号强度)建立映射关系,即对应每个室内场景的位置坐标建立专属的信号特征指纹,从而匹配估算出待测目标的空间位置。指纹匹配法分训练和定位 2 步进行:训练是将定位环境划分网格,并在网格点采集信号指纹,如 WiFi 强度,建立指纹库;定位是将接收到的信号特征测量值与指纹库中的值进行比对,通过相似性分析得到室内位置估计。与测距交汇法相比,该方法的优点在于不需要求解信道衰减模型,缺点在于指纹库的构建需要耗费大量人力。
基于wifi的 指纹匹配法现有提升方法是:可以由用户上传数据至指纹库,节约成本;通过优化算法和数据结构,通过有限基站建立更为精确的信号指纹库;在定位环境中布置少量均匀的参考节点以实时动态检测信号,提高精度;
(2)蓝牙定位技术
与 WiFi 定位原理相同,蓝牙定位分为测距交汇法和指纹匹配法。基于蓝牙的定位技术容易受到外部噪声信号的干扰,信号稳定性较差,通信范围较小。
蓝牙设备同样可作为无线接入点,与 WiFi 定位技术类似;因此指纹匹配算法同样应用广泛,针
对信号范围小、稳定性差等特点,经常与 WiFi 组合应用来实现室内定位的小范围区域增强。
(3)UWB定位技术
UWB 定位技术用来传输数据的脉冲信号功率谱密度极低、脉冲宽度极窄,因此具备了时间分
辨率高、空间穿透能力强等特点,在视距(line of sight,LOS)环境下能获得优于厘米级的测距和定位精度。
UWB 定位方法包括信号到达角(angle of arrival, AOA)、接收信号强度( received signal strength, RSS)、信号到达时间(time of arrival, TOA)和信号到达时间差(time difference of Arrival, TDOA),是一种典型的基于测距方法的定位技术。
(4)蜂窝移动网络定位技术
随着移动网络通信长期演进(long term evolution, LTE)定位技术的发展,基于基站的蜂窝移动网络定位技术的精度得到了较大提高;第 5 代移动网络通信技术(5G)协议的投入商用对室内定位领域是一个巨大的契机,其密集组网技术也使得基站定位具备广阔的应用前景和发展空间。
蜂窝定位技术可以便捷使用搭建的基础设施,依靠移动通信系统的体系结构和传输信息实现用户的位置坐标推算。利用室内可直接测得的无线电通信信号,与 WiFi、蓝牙、UWB 技术相同,既可基于信号强度使用传统的位置指纹匹配方法,也可以进行 TOA、TDOA、AOA(木鸡,要学习) 等测距方式测量。蜂窝移动网络定位技术依赖通信基站,与基站密度密切相关:虽然室内信号受基站输出功率的动态调整和非视距传播效应的影响,定位精度不高;但在室内外无缝定位需求下,可作为普适化的室内外坐标一体化的定位方案。
针对空缺的室内外无缝定位技术,我国自主研制的室内外高精度定位导航“羲和”系统中采用时分正交频分复用(timecode division-orthogonal frequency division multiplexing, TC-OFDM)技术(木鸡,要学习)。该技术由北京邮电大学提出,它融合了定位和通信信号体制,属于蜂窝移动网络通信技术的一种,可实现高精度的广域室内外无缝定位。国内企业如北京首科信通、苏州羲和北斗作为 TC-OFDM 专用设备、产品、室内外位置服务的推广窗口,TC-OFDM 技术逐渐走向成熟和产业化标准。
(5)伪卫星定位技术(木鸡,要学习)
伪卫星是指安装在地面附近的能够发射类似于 GNSS 信号的装置,其本质是一个 GNSS 信号模拟器,可以作为室内环境中对 GNSS 信号的补充。卫星技术定位的规模化难度比较低,同时定位精度为亚米级,能够满足大多数时候的定位需求,但是较高的基站部署成本使该技术停留在专业领域,尚未投入市场使用。
2.1.2基于天然信源的室内定位技术
基于天然信源的室内定位技术是指利用传感器将某些与位置相关的天然信源转换为可用于定位的信号以实现定位,例如:惯性导航技术利用惯性传感器感知载体的运动状态;地磁导航技术利用地磁传感器获取当前位置的磁场特征;气压计测高技术利用气压计测量当前位置的气压等。
(1)惯性导航
惯 性 导 航 技 术 是 基 于 惯 性 传 感 器 ( inertial measurement units, IMU)对状态进行预测,具体是利用加速度计、陀螺仪和磁力计等传感器对前一时刻的位置信息进行处理,得到当前时刻的
相对位置。惯性导航系统基于航位推算方法实现终端的定位,具备较强的自主性,短时间内的定位精度和连续性非常高;但定位导航精度极大地受限于器件成本,且不可避免地随着时间的推移产生累积误差,需要借助外界定位信息源不断对位置推算进行校准。
零速校正(木鸡,要学习)是惯性导航技术中的一种误差补偿技术,可以有效控制长时间的累积误差,提高系统精度。
(2)地磁定位
地磁定位同样可以采用指纹匹配的方法,通过事先采集并构建精确的地磁指纹数据库,利用传感器获取人员当前位置磁场数据,将实时数据与地磁指纹库基准数据精确匹配获得最佳估测值,从而实现人员在指定区域中的定位(将信号换成磁场的指纹匹配)。
2.1.3多源融合定位技术
目前国内主流的室内定位方法是根据场景需求及各类室内定位技术的特点,选择 2 种及以上的定位技术进行融合以获得当前位置的最优估计。融合方法有 2 种,松耦合和紧耦合法,2 者的区别在于:松耦合需要各类传感器提供定位结果,而紧耦合需要各类传感器直接提供观测信息;松耦合易于实现,但要求各类传感器均输出定位结果,紧耦合较松耦合相比实现难度大,但各类传感器值需提供观测信息即可。
融合定位的信息源可以是多种多样的,GNSS信号、加速度计/陀螺仪、基站信号、WiFi、蓝牙、
气压计、地磁、视觉、室内地图等等;但融合定位模型和方案同样需要考虑室内定位结果的精度和
可靠性:多种信息的协同融合可以带来精度的提升,同样可能会导致灾难性的定位失准。获得传感
器数据后需要对多来源信息进行预处理以剔除原生和融合噪声,从数据中提取特征后要根据不同
应用情景、设备条件和具体需求进行特征级融合,赋予不同的权重,结合地图信息和各种状态估计
滤波算法后进行决策级融合。
PS:由于智能手机中的信号接收器和传感器种类及性能有限,对于有室内定位高精度需求的应用场景,在原有的室内环境中,可额外增加特殊信源,该信源可以是智能手机无法接收的,再根据信源开发与之匹配的终端。
国内成熟的技术方案主要有 2 套方案:一套是基于超宽带定位技术的UWB 系统;另一套则是基于激光雷达的即时定位与地图构建(simultaneous localization and mapping, SLAM)系统,都可以保证高精度的专业室内定位需求(木鸡,要学习)。
根据“2018 年室内导航定位比测”结果,无额外设备辅助的智能手机定位场景下,最优的室内
定位技术方案为惯导+WiFi+气压计+地磁+地图约束,水平定位精度优于 3.2 m、高程定位精度优于
1.2 m(95 %置信区间)。
2.1.4国内室内定位发展趋势
目前国内主流的室内定位方案主要是针对不同的应用需求选用 WiFi、蓝牙、UWB、惯导、气
压计和磁场中 2 种以上信源,并对不同信源提供的定位信息进行融合。
国内室内定位的发展趋势进行总结,主要包括以下 3 个方面:
1)探索新的室内定位技术。目前,新室内定位技术的研究热点集中于视觉、光源、音频、蓝牙 5.0 和 5G 信号。除视觉定位外,其他几种都需要外置的信号源。
2)发展多源定位信息融合技术。由于各类室内定位技术的局限性,将 2 种以上具备互补特性的
定位技术组合使用以获得优于优于单一技术的定位性能,是目前实现室内定位的主流。
3)建立室内定位技术标准体系。目前室内定位技术缺乏统一的标准规范,即一套完整的室内空间数据采集、处理、编码、更新、集成、应用和服务标准和技术规范体系,对室内数据的采集、处理与集成过程中的元数据信息、数据模型、交换格式、数据精度等具体细节进行统一规定,使得室内导航服务的生产、更新、维护和数据共享成为可能。
4)建立室内定位性能评估体系。前室内定位技术尚未达到与 GNSS 相当的成熟度,对其研究焦点还集中在提升定位精度上。但是,随着室内定位技术的不断发展,当定位精度的需求能够满足时,为提升服务质量,需额外考虑定位结果的可靠性、定位服务的连续性等其他服务性能指标。
3.北斗导航卫星系统(BDS)
3.1北斗卫星导航系统的发展
3.1.1 发展分三步走
北斗系统的发展分为三步:验证系统、扩展的区域导航系统和全球导航系统
第一步:验证系统。2000年以来, 中国已成功发射3颗GEO卫星, 初步建成北斗卫星导航试验系统。该系统能够提供基本的定位、授时和短报文通信服务。
北斗卫星导航试验验证系统的服务区域为东经70°~140°, 北纬5°~55°, 定位精度优于20 m。
北斗试验验证系统具有如下特点:
一是首次定位速度快。北斗验证系统的用户定位、电文通信和位置报告可在几秒内完成, 而GPS首次定位一般需要1~3 min。
二是集定位、授时和报文通信为一体。GPS和GLONASS系统只解决了用户在何时、在何地的授时和定位问题, 北斗验证系统是世界上首个集定位、授时和报文通信为一体的卫星导航系统, 解决了“何人、何时、何处”的相关问题, 实现了位置报告、态势共享。三是授时精度高。三是授时精度高。GPS的精密定位服务 (PPS) 授时精度为200 ns, 北斗验证系统的单向授时精度达100 ns, 双向定时精度达到20 ns, 远远高于GPS的授时精度。四是可实现分类保障。即可划分使用等级范围, 授权用户与公开用户分开, 公开用户也可随时进行定位保障等级的调整、优先权调配和能力集成。
第二步:扩展的区域导航系统。在验证系统的基础上, 北斗卫星导航系统将进行区域导航能力拓展。即由12颗卫星组成扩展区域卫星导航系统, 采取有源与无源相结合体制, 兼容北斗验证系统的全部功能。2011年左右覆盖亚太地区, 即服务拓展到南北纬55°, 东经55°至180°。
第三步:北斗全球卫星导航系统。在扩展区域导航系统12颗卫星基础上, 北斗导航系统的服务将由区域拓展到全球, 设计性能优于俄罗斯的GLONASS, 与第三代GPS性能相当。将在2020年左右为全球用户提供服务。
3.1.2 BDS的发展历程
1957年,苏联科学家V.S.谢巴舍维奇首先提出使用卫星进行导航的建议;
1958年,美国1958年提出卫星导航原理;
1989年,我国进行了第一次双星定位试验,于1994年1月决定研发双星快速导航定位系统,将其命名为北斗卫星导航系统;
1996年,解放军基于GPS定位进行对“台独”势力进行警告性射击时的导弹偏离,
并鉴于当时国情,国家决定采取“三步走发展战略:2000年—2012年—2020年
2020年7月31日,北斗三号建成开通,向全世界提供PNT服务。
北斗导航系统建设的基本原则: 开放性、自主性、兼容性、渐进性。
具体发展历程可看论文:
3.1.3时间系统与坐标系统:
北斗时 (BDT) 溯源到协调世界时UTC (NTSC) , 与UTC的时间偏差小于100 ns。
BDT的起算历元时间是2006年1月1日零时零分零秒 (UTC)。
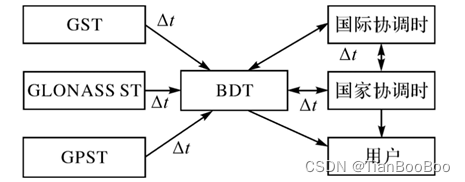
在设计北斗时间系统时, 已经考虑到BDT与GPS时 (GPST) 、Galileo时 (GST) 和GLONASST的互操作问题, 并将监测和发播BDT 与GPST、GST、GLONASST及GST的时差。
北斗卫星导航系统相应的坐标系统为中国2000大地坐标系统 (CGCS 2000) 。CGCS 2000的定义与国际地球参考系统 (ITRS) 一致(以ITRF 97 参考框架为基准, 参考框架历元为2000.0)。
2000国家大地坐标系的大地测量基本常数分别为:
长半轴 a = 6 378 137 m;
地球引力常数 GM =3.986004418×10ms;
扁率f = 1/ 298. 257 222 101;
地球自转角速度X =7.292115×10-5rad s
注:为什么北斗坐标系统采用CGCS2000?
CGCS2000是(中国)2000国家大地坐标系的缩写,该坐标系是通过中国GPS 连续运行基准站、 空间大地控制网以及天文大地网与空间地网联合平差建立的地心大地坐标系统。
2000(中国)国家大地坐标系以ITRF 97 参考框架为基准, 参考框架历元为2000.0。
随着情况的变化和时间的推移,以经典测量技术为基础的局部大地坐标系,即1954北京坐标系和1980西安坐标系已经不能适应科学技术特别是空间技术发展,不能适应中国经济建设和国防建设需要。中国大地坐标系的更新换代,是经济建设、国防建设、社会发展和科技发展的客观需要。
以地球质量中心为原点的地心大地坐标系,是21世纪空间时代全球通用的基本大地坐标系。以空间技术为基础的地心大地坐标系,是中国新一代大地坐标系的适宜选择。地心大地坐标系可以满足大地测量、地球物理、天文、导航和航天应用以及经济、社会发展的广泛需求。
中国新一代大地坐标系建立的基本原则是:
1)坐标系应尽可能对准 ITRF(国际地球参考框架);
2)坐标系应由空间大地网在某参考历元的坐标和速度体现;
3)参考椭球的定义参数选用长半轴、扁率、地球地心引力常数和地球角速度,其参数值采用 IUGG (国际大地测量与地球物理联合会)或 IERS(国际地球旋转与参考系服务局)的采用值或推荐值。
2000中国大地坐标系(China Geodetic Coordinate System 2000,CGCS2000),中国人又称之为2000国家大地坐标系,是中国新一代大地坐标系。
4 网络RTK
详见学习报告
对网络RTK数学模型的简单学习-行业报告文档类资源-CSDN下载


















 1741
1741

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











