






Matlab机械臂综合仿真平台,包含运动学、动力学和控制。
MATLAB机器人仿真正逆运动学simulink轨迹规划 机械臂动力学控制等 gui控制仿真平台PUMA机器人 robotics toolbox
ID:1850668081184412
爱小马的海盐大傻

Matlab机械臂综合仿真平台,是一个强大的工具,用于实现机械臂的运动学、动力学和控制。在现代工业和科学领域中,机器人技术的发展越来越受到关注。机器人在自动化生产线、医疗手术、空间探索等各个领域都扮演着重要的角色。因此,为了更好地理解和应用机器人技术,研究人员和工程师需要一个可靠且易于使用的仿真平台来模拟和评估机械臂的性能。
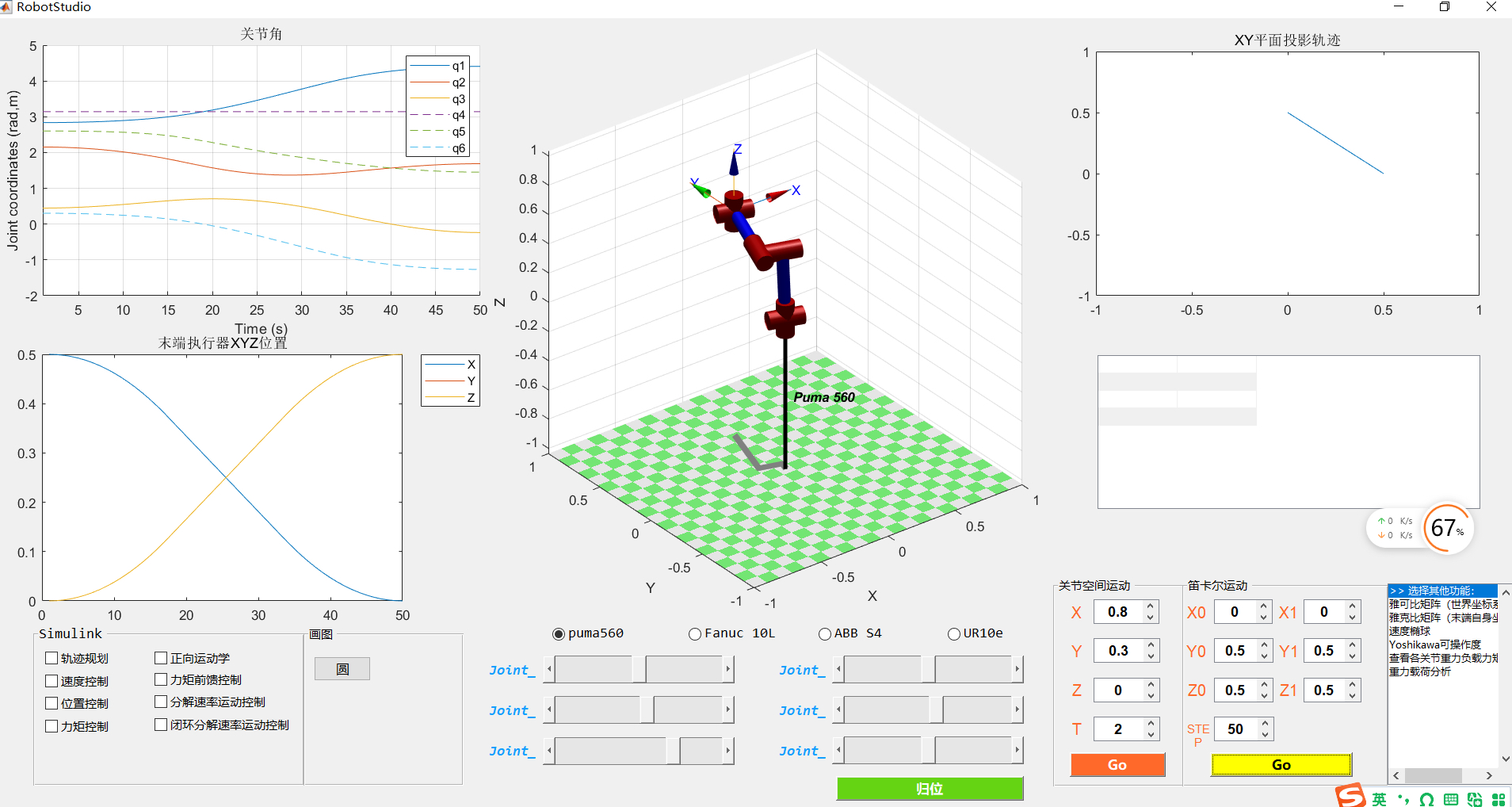
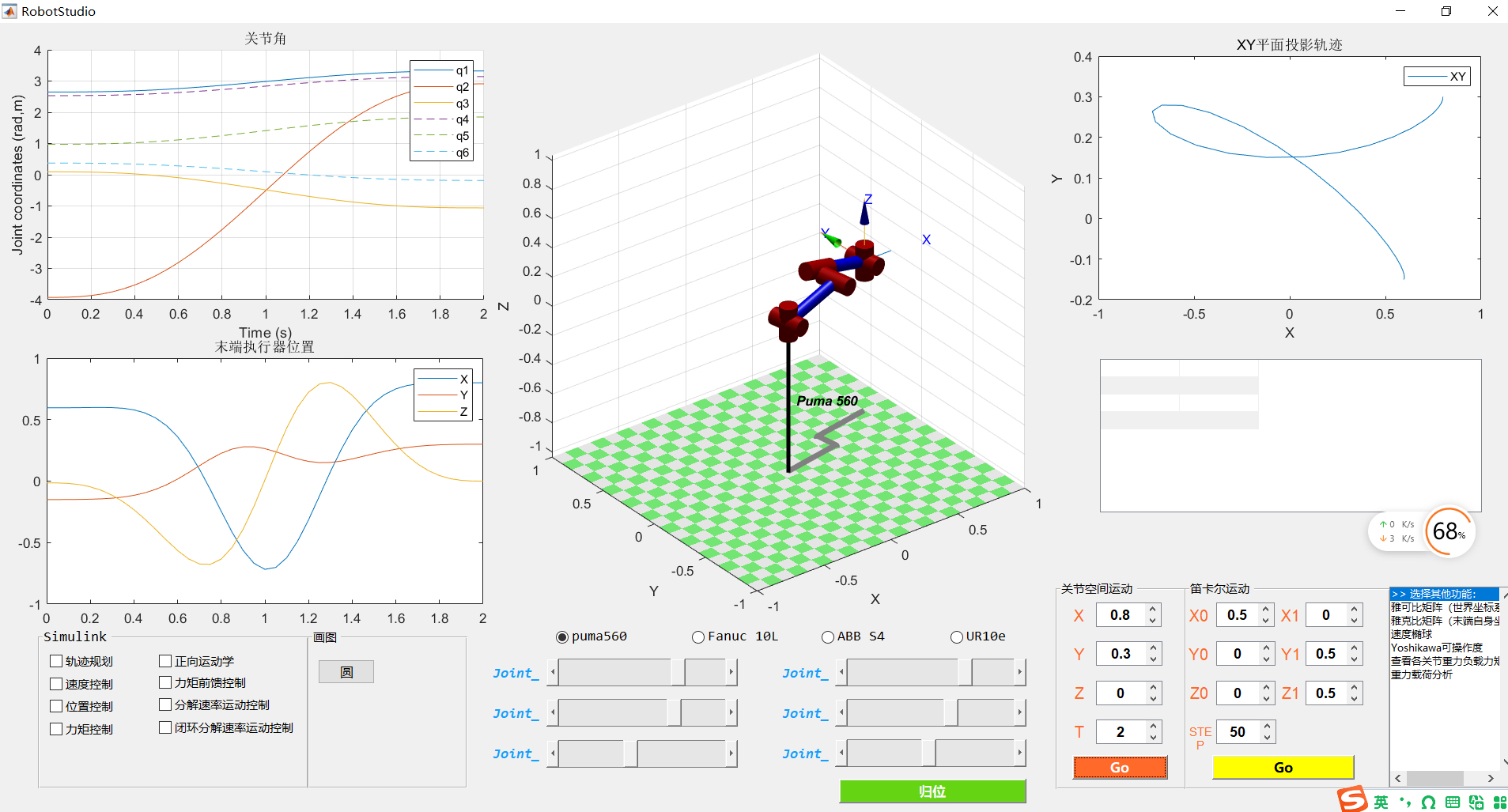
MATLAB机器人仿真平台为用户提供了一个全面的仿真环境,可以进行机器人的正逆运动学、simulink轨迹规划、机械臂动力学控制等各种仿真任务。通过这个平台,用户可以快速搭建机器人模型,并对其进行运动学和动力学分析。同时,该平台还提供了各种控制算法的实现,以帮助用户设计和评估机器人的控制系统。
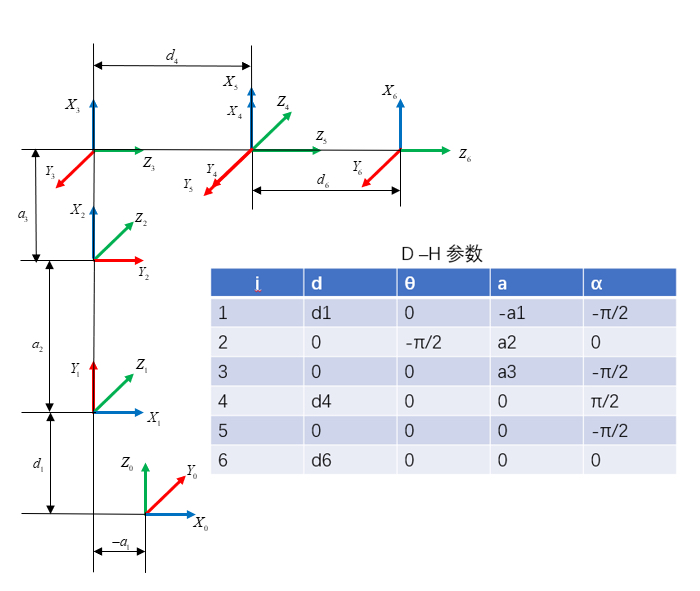
在机器人技术中,运动学和动力学是两个基本的概念。运动学研究机器人的位置、速度和加速度之间的关系,而动力学则研究机器人的力学性能和运动响应。通过MATLAB机器人仿真平台,用户可以轻松地实现机器人的运动学和动力学分析。例如,用户可以通过输入关节角度和长度参数,计算机器人的末端位姿。同时,用户还可以控制机器人的末端执行器,通过反向运动学计算出相应的关节角度。这些功能可以帮助研究人员和工程师更好地了解机器人的运动学特性,并为后续的控制设计提供基础。
除了运动学和动力学分析,MATLAB机器人仿真平台还提供了simulink轨迹规划功能。轨迹规划是机器人控制中的重要任务,它涉及到如何使机器人从一个位置运动到另一个位置,并且在运动过程中满足一定的约束条件。通过该平台,用户可以选择不同的轨迹规划算法,并进行参数调整和性能评估。这些功能有助于用户设计出更加高效和安全的机器人控制系统。
在MATLAB机器人仿真平台中,还提供了PUMA机器人和robotics toolbox这两个重要的组件。PUMA机器人是一个常用的工业机器人,具有六个自由度和灵活的结构。通过该平台,用户可以轻松地模拟和控制PUMA机器人的运动。而robotics toolbox是MATLAB中一个功能强大的工具箱,提供了各种用于机器人建模、运动学分析和控制设计的函数和工具。这些组件为研究人员和工程师提供了丰富的资源,使得他们能够更加灵活地进行机器人仿真和控制算法的开发。
综上所述,MATLAB机械臂综合仿真平台是一个强大而全面的工具,可以帮助研究人员和工程师实现机械臂的运动学、动力学和控制。通过该平台,用户可以快速搭建机器人模型,并进行各种仿真任务。同时,该平台还提供了simulink轨迹规划、PUMA机器人和robotics toolbox等组件,为用户提供了更加丰富和灵活的资源。因此,MATLAB机械臂综合仿真平台是研究人员和工程师在机器人技术研究和应用中不可或缺的工具之一。
相关的代码,程序地址如下:http://nodep.cn/668081184412.html
















 2714
2714

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









