






三维重建学习——几何约束
常用的几何约束
一、epipolar constraint极线约束
是两幅图像中点与线的几何关系。假设p是空间中的一点,p1和p2是点p在两张影像中的投影,其几何关系如图1所示。若已知左影像映射点,则右影像相应的映射点一定在相对于p1的极线l2上],如式所示,p1与p2的关系如式所示。
式中,F——两幅图像的基础矩阵,
a,b,c——极线表达式的系数。
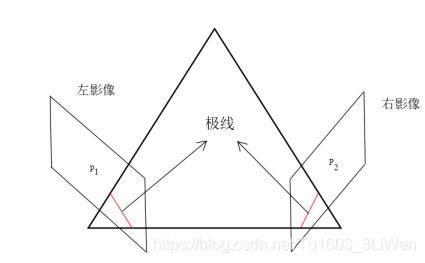
利用这种几何关系来约束匹配,缩小了匹配点的搜索范围,在一定程度上减少了待匹配点数量,使匹配的鲁棒性、精度都得到很大提高。
二、pairwise constraint(成对约束)
假设线段与它相邻的某些线段共面的可能性很高。

















 1243
1243

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









