






移动机器人路径规划(人工势场法),本次路径规划的代码是基于matlab语言的,该方法的基本思想是机器人受到来自目的地的引力以及受到来自障碍物的斥力。
这 些力形成合力后驱使机器人避开障碍物后移向目的地。
人工势场法算法简单易于实现但 该方法也存在着很多不足。
为此现在出现了很多关于改进人工势场法的算法。
势场法较 容易实施,尽管它存在理论上的局限性,但它在移动机器人应用中已经成为一种普通的工 具。
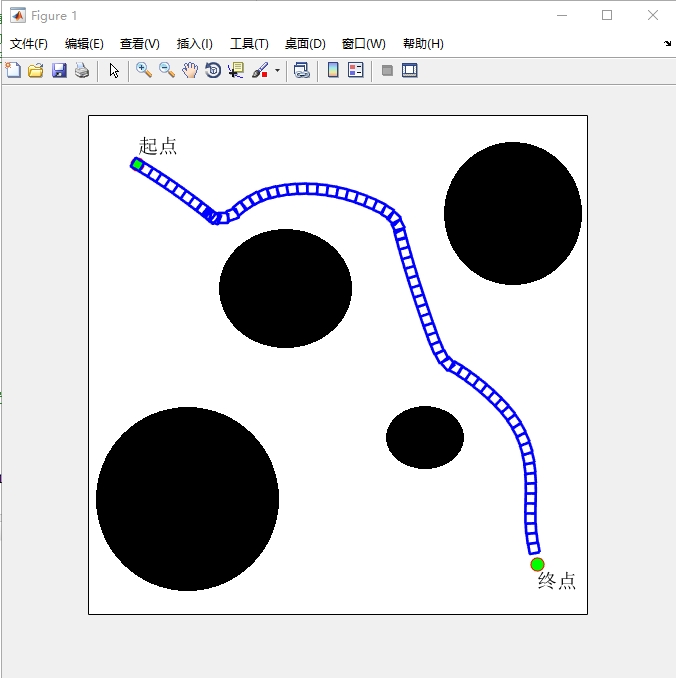
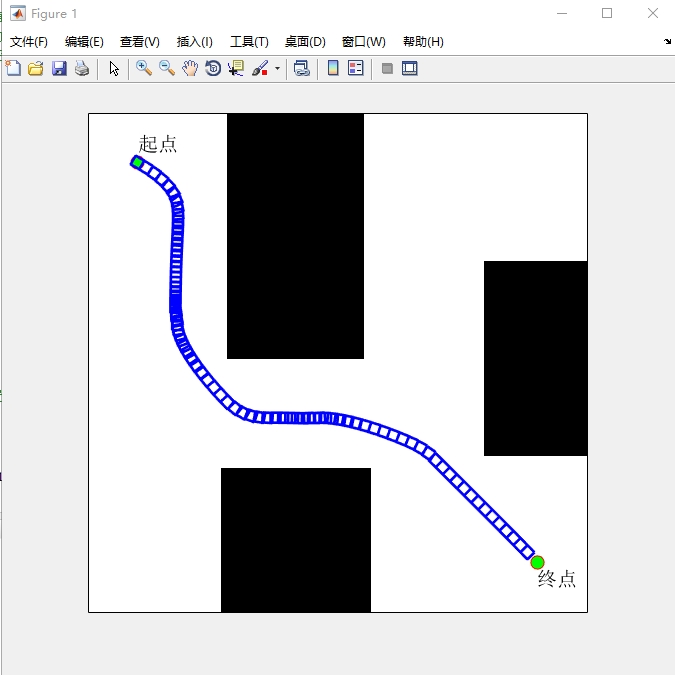
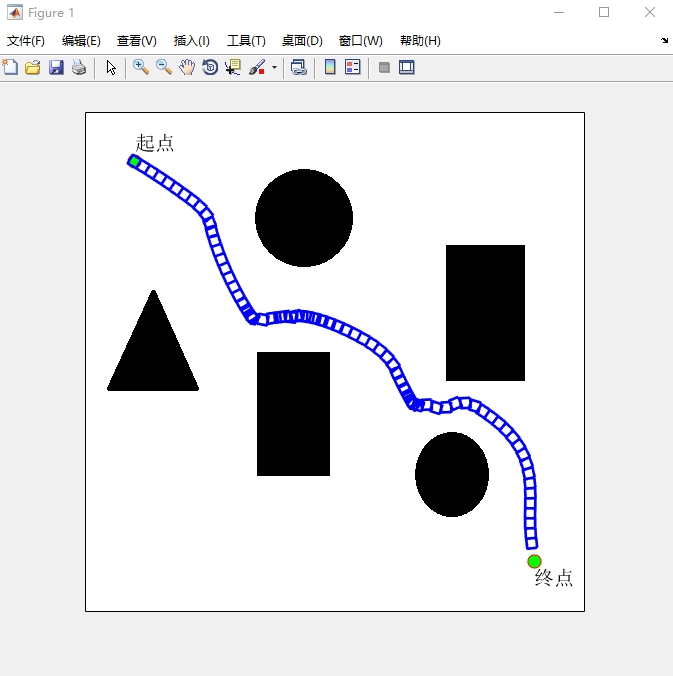
通过构造人工势场来进行避障,并且能准确快速的到达目的地。
ID:1519691025842836
.!EMD
题目:基于人工势场法的移动机器人路径规划
摘要:移动机器人路径规划是自动驾驶和智能机器人领域的核心问题之一。本文基于人工势场法,使用MATLAB语言编写了一种路径规划算法。该算法通过构造机器人受引力和斥力作用的人工势场,实现了机器人在避开障碍物的同时向目的地移动。本文通过介绍人工势场法的基本原理和算法流程,分析了该方法的优点和局限性,并探讨了改进人工势场法的几种方法。
- 引言
移动机器人路径规划是自动驾驶和智能机器人研究中的重要课题。在实际应用中,通过合理规划路径,能够有效避免机器人与障碍物碰撞,并快速准确地到达目的地。人工势场法作为一种常用的路径规划方法,通过构造人工势场来引导机器人运动,已经在移动机器人领域得到广泛应用。
- 人工势场法基本原理
人工势场法是基于物理学中的势场概念而发展起来的一种路径规划方法。在路径规划过程中,通过构造机器人受到的引力和斥力作用的人工势场,来指导机器人的运动。引力场使得机器人朝着目的地移动,斥力场使得机器人避开障碍物。通过合理设置引力和斥力的大小和方向,可以实现机器人的平滑移动和避障。
- 人工势场法算法流程
本文使用MATLAB语言编写了基于人工势场法的路径规划算法。算法流程如下:
步骤1:初始化机器人位置和目的地位置。
步骤2:计算机器人受到的引力和斥力。
步骤3:计算合力并更新机器人位置。
步骤4:判断是否达到目的地,如果是则结束,否则返回步骤2。
步骤5:输出最终路径。
- 人工势场法的优点和局限性
人工势场法具有以下优点:
- 算法简单易于实现,不需要复杂的数学模型和高阶算法。
- 能够实现准确快速的路径规划,并能够在实时环境中进行实时调整。
- 对于简单的障碍物和目的地,具有较好的效果。
然而,人工势场法也存在一些局限性:
- 对于复杂的环境和障碍物布局,容易产生局部最优解。
- 难以处理机器人之间的碰撞问题。
- 对于高速移动和动态障碍物,容易产生震荡和震荡现象。
- 改进人工势场法的方法
为了克服人工势场法的局限性,研究者提出了多种改进方法,包括:
- 引入梯度下
相关的代码,程序地址如下:http://fansik.cn/691025842836.html
















 401
401

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









