






船舶/无人艇/无人船,线性及非线性nomoto响应型操纵运动回转实验和Z型实验simulink仿真+基于pid控制器的航向控制
ID:9269783219857124
很轻松兰生尘封
探索无人船舶的操纵运动回转与Z型实验仿真:基于Nomoto响应与PID控制器的研究
一、引言
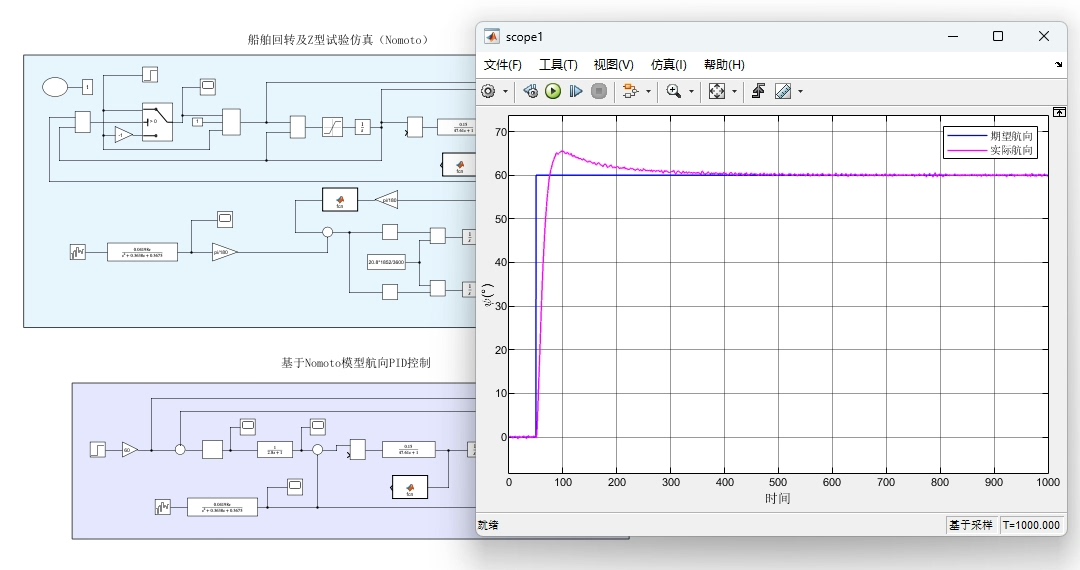
随着科技的飞速发展,无人艇和无人船技术逐渐成为海事领域的研究热点。本文将重点探讨无人船舶的操纵运动回转实验和Z型实验Simulink仿真,涉及线性及非线性Nomoto响应型操纵运动,以及基于PID控制器的航向控制。
二、无人船舶操纵运动概述
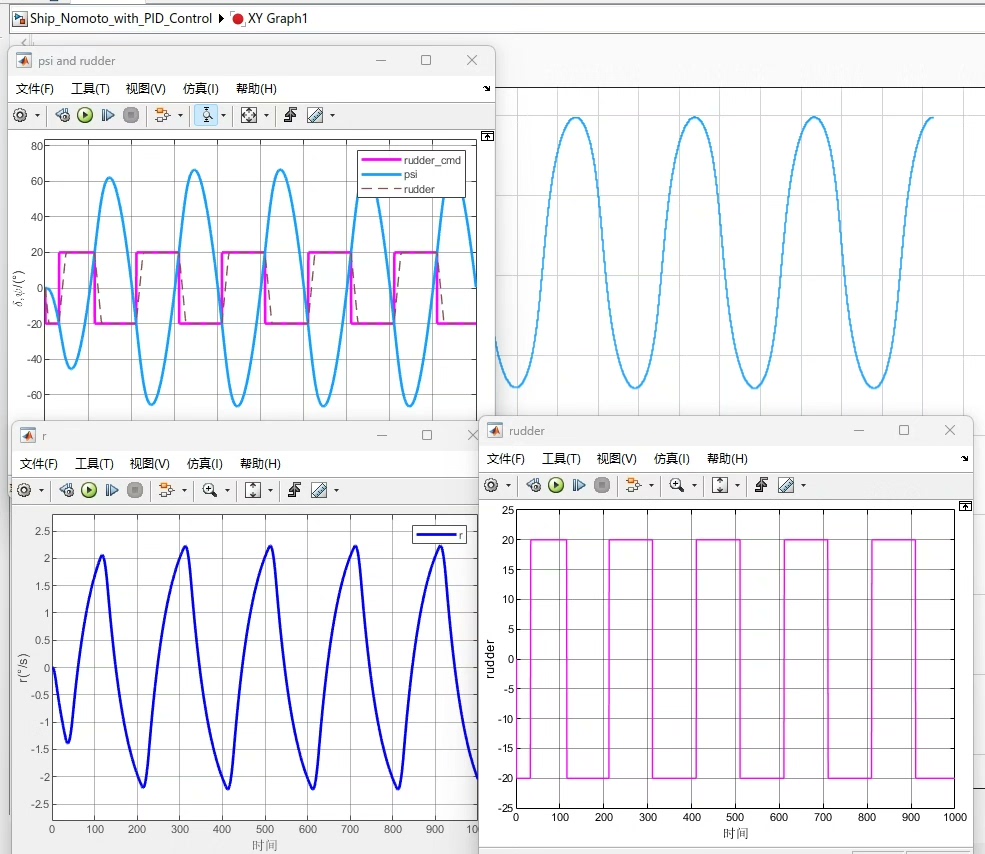
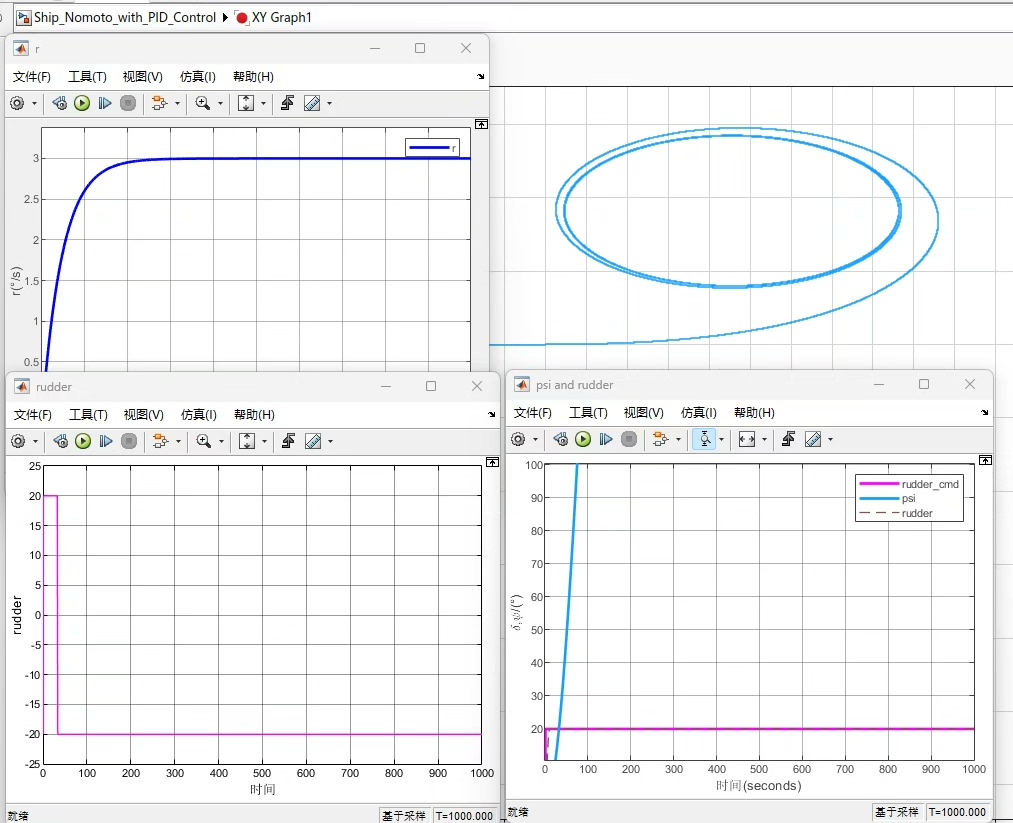
无人船舶的操纵运动涉及船舶的转向、前进、停止等动作,是实现自主航行的基础。其中,回转实验和Z型实验是评估船舶操纵性能的重要方法。
三、Nomoto响应型操纵运动
Nomoto响应是描述船舶运动的一种数学模型,包括线性及非线性两种情况。在线性Nomoto响应模型中,船舶的运动输出与输入之间存在线性关系;而在非线性Nomoto响应模型中,这种关系呈现出非线性特征。在无人船舶的操纵运动中,了解并应用Nomoto响应模型,对于提高船舶的操控精度和稳定性具有重要意义。
四、Simulink仿真在无人船舶操纵运动中的应用
Simulink是MATLAB旗下的仿真工具,广泛应用于各种动态系统的建模和仿真。在无人船舶的操纵运动中,我们可以利用Simulink进行回转实验和Z型实验的仿真。通过构建合理的仿真模型,我们可以模拟实际海域中的船舶运动情况,从而研究船舶的操纵性能。
五、基于PID控制器的航向控制
PID控制器是一种常用的控制算法,具有结构简单、稳定性好等优点。在无人船舶的航向控制中,基于PID控制器的航向控制系统能够有效地实现船舶的航向保持和路径跟踪。通过调整PID控制器的参数,我们可以实现对船舶运动的精确控制。
六、无人艇与无人船的技术挑战与前景
无人艇和无人船技术的发展面临着诸多挑战,如复杂环境下的自主导航、海洋环境的感知与避障等。但是,随着人工智能、传感器等技术的不断进步,无人船舶的智能化程度将不断提高,未来将在海事领域发挥重要作用。
七、结论
本文探讨了无人船舶的操纵运动回转实验和Z型实验Simulink仿真,分析了基于Nomoto响应与PID控制器的航向控制。通过深入研究无人船舶的操纵性能,我们为无人船舶的自主航行提供了理论支持和技术参考。未来,随着技术的不断进步,无人船舶将在海事领域发挥更加重要的作用。
具体的代码,程序如下地址:http://wekup.cn/783219857124.html
















 720
720

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









