






M00211-carsim/simulink中自动驾驶的横向线性二次型调节器算法
ID:162900784161089918
范德林德皮尔逊
M00211-Carsim Simulink中自动驾驶的横向线性二次型调节器算法解析
随着自动驾驶技术的迅猛发展,横向控制作为自动驾驶系统的重要组成部分,其性能直接影响到车辆的稳定性和乘坐舒适性。在横向控制算法中,线性二次型调节器(Linear Quadratic Regulator, LQR)因其优化性能被广泛研究与应用。本文将深入探讨在Carsim Simulink环境中,基于LQR算法的自动驾驶横向控制策略。
一、横向控制的重要性
横向控制主要负责车辆的侧向运动,包括车道保持、自动泊车以及避障等功能。在这一过程中,车辆必须能够精确地跟随目标轨迹,及时调整车速以及车辆横摆角度,以保证行驶的稳定性和安全性。因此,横向控制算法的设计至关重要。
二、线性二次型调节器(LQR)概述
线性二次型调节器(LQR)是一种最优控制方法,旨在通过状态空间模型找到一种最优控制策略,使得系统性能指标(通常是二次型的成本函数)达到最小。在自动驾驶的横向控制中,LQR算法能够有效地处理车辆的轨迹跟踪问题。
三、Carsim Simulink环境下的LQR算法应用
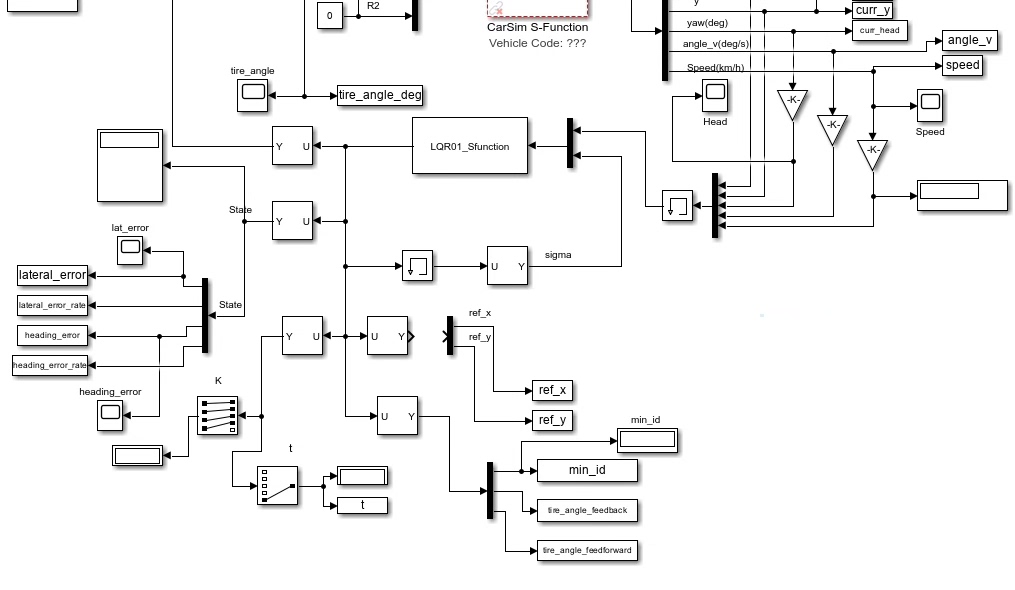
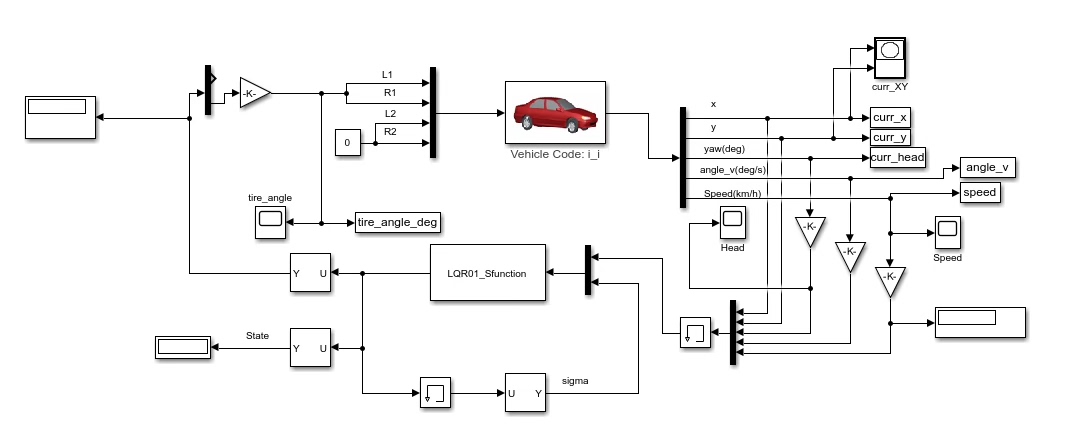
- 模型建立:在Carsim中建立车辆模型,并在Simulink中建立相应的控制系统模型。这两个模型需要通过适当的接口进行连接,以实现车辆动力学与控制系统之间的交互。
- 状态空间描述:利用状态空间方法描述车辆的运动学特性,并建立适当的性能指标函数。这个函数将包括车辆的位置误差、速度误差以及控制输入等因素。
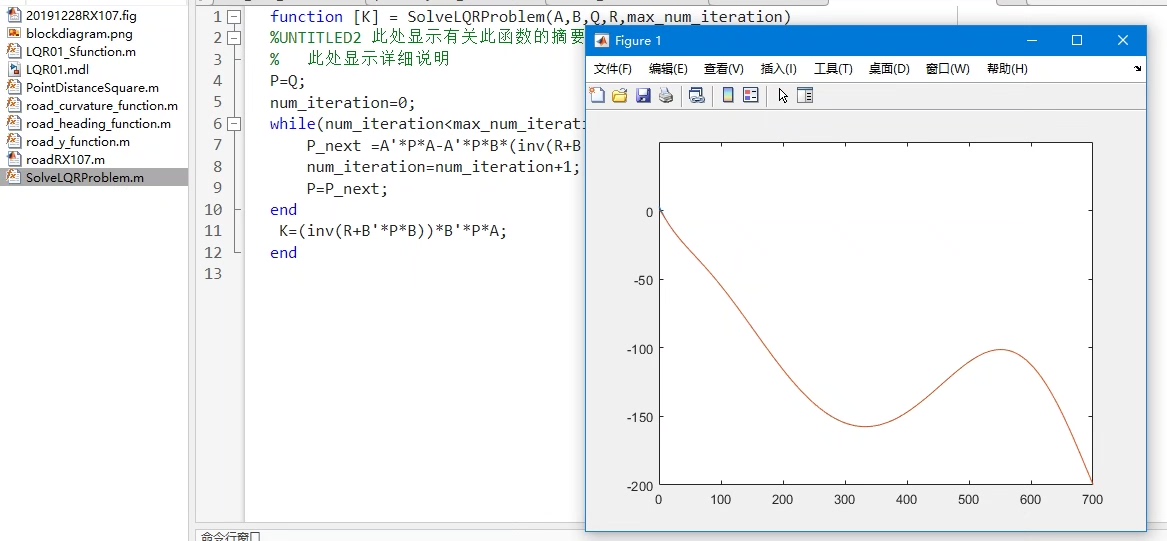
- LQR算法设计:基于状态空间模型和性能指标函数,设计线性二次型调节器。这一步骤涉及求解Riccati方程,得出最优反馈增益矩阵。
- 仿真测试与优化:在Simulink环境中进行仿真测试,验证LQR算法的有效性。根据测试结果进行参数调整和优化,以达到更好的性能表现。
四、LQR算法的优势与挑战
使用LQR算法进行自动驾驶横向控制的优点在于其能够提供最优解,且对于线性系统具有较高的控制精度。然而,LQR算法也面临一些挑战,如非线性车辆动力学模型的处理、外界干扰和不确定性的应对等。
五、未来研究方向
针对LQR在自动驾驶横向控制中的应用,未来的研究可以围绕以下几个方面展开:
- 非线性车辆模型的LQR算法研究。
- 外界环境感知与预测在LQR算法中的应用。
- 多目标优化与鲁棒性设计的探索。
六、结论
本文详细探讨了M00211-Carsim Simulink环境中自动驾驶的横向线性二次型调节器算法的应用。通过对LQR算法的原理及其在自动驾驶横向控制中的实施过程的分析,展示了LQR算法在提升车辆横向控制性能方面的潜力。随着自动驾驶技术的不断进步,对横向控制算法的研究将越发深入,LQR算法的应用也将得到更广泛的拓展。
具体的代码,程序如下地址:http://wekup.cn/784161089918.html
















 405
405

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









