






【蚁群算法】 改进蚁群算法 Dijkstra算法 遗传算法 人工势场法实现二维 三维空间路径规划
本程序为蚁群算法+Dijkstra算法+MAKLINK图理论实现的二维空间路径规划
算法实现:
1)基于MAKLINK图理论生成地图,并对可行点进行划分;
2)用Dijkstra算法实现次优路径的寻找;
3)在Dijkstra算法的基础上加入了蚁群算法,调整了搜索策略,使路径更短
可调参数:算法迭代次数;起始点;目标点;障碍物位置;障碍物大小
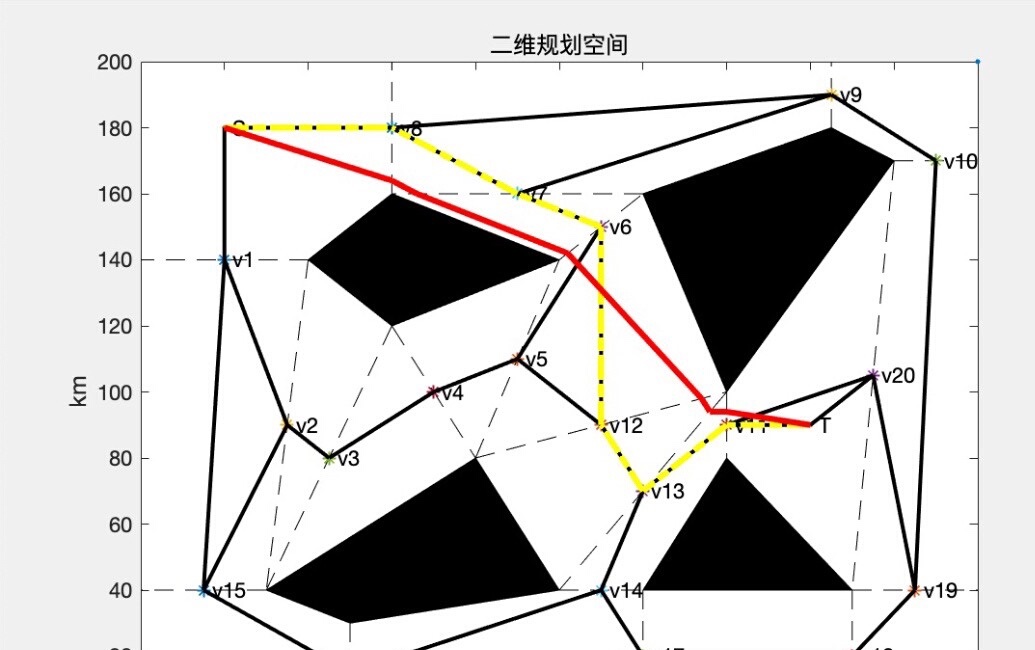
仿真结果:地图上显示最优路径的对比 + 迭代曲线 + 输出行走距离
YID:9259675637461038
ZeHomme
题目:多维空间路径规划算法的探索与实践:结合蚁群算法与Dijkstra算法的MAKLINK图实现
摘要:本文旨在探索并实践一种新型的路径规划算法,通过将蚁群算法与Dijkstra算法结合,再利用MAKLINK图理论生成地图,实现对二维和三维空间的路径规划。本文将详细介绍算法的实现过程,包括基于MAKLINK图理论的地图生成、次优路径的Dijkstra算法寻找,以及在Dijkstra算法基础上加入蚁群算法的搜索策略调整。此外,还将展示算法的可调参数及仿真结果,包括地图上最优路径的对比、迭代曲线和行走距离的输出。
一、引言
在机器人导航、自动驾驶等领域,路径规划是一个重要的研究课题。本文将介绍一种结合了蚁群算法和Dijkstra算法的MAKLINK图理论应用,旨在解决二维和三维空间的路径规划问题。该算法能够根据地图信息、障碍物位置和大小等因素,寻找出最优路径。
二、算法实现
- 基于MAKLINK图理论生成地图
首先,我们利用MAKLINK图理论生成地图。该理论能够根据地理信息、建筑物布局等因素,将地图划分为可行点和不可行点。这些信息将作为后续算法的输入。
- 利用Dijkstra算法寻找次优路径
在可行点划分完成后,我们利用Dijkstra算法寻找次优路径。Dijkstra算法是一种图搜索算法,能够快速找到图中单源点到所有其他顶点的最短路径。在此处,我们将Dijkstra算法应用于二维或三维空间中的路径寻找,以获得次优路径。
- 在Dijkstra算法基础上加入蚁群算法
为了进一步提高路径的优化程度,我们在Dijkstra算法的基础上加入了蚁群算法。蚁群算法是一种模拟蚂蚁觅食行为的优化算法,能够通过模拟蚂蚁的信息素传递过程,调整搜索策略,使路径更短。我们将蚁群算法与Dijkstra算法相结合,以获得更优的路径。
三、可调参数与仿真结果
本算法具有多个可调参数,包括算法迭代次数、起始点、目标点、障碍物位置和障碍物大小等。通过调整这些参数,我们可以得到不同的路径规划和优化结果。
仿真结果显示,在地图上可以清晰地看到最优路径的对比。此外,我们还输出了迭代曲线和行走距离等信息,以便更好地评估算法的性能。
四、结论
本文提出了一种结合蚁群算法与Dijkstra算法的MAKLINK图理论应用,实现了二维和三维空间的路径规划。通过仿真实验,我们验证了该算法的有效性。在未来的研究中,我们将进一步优化算法性能,提高路径规划的准确性和效率,为机器人导航、自动驾驶等领域提供更好的技术支持。
示例代码(伪代码):
# 基于MAKLINK图理论生成地图
# ...(此处省略具体实现代码)...
# 利用Dijkstra算法寻找次优路径
def dijkstra_algorithm(graph, start_point, end_point):
# ...(此处省略具体实现代码)...
return shortest_path_dijkstra # 返回次优路径信息
# 在Dijkstra算法基础上加入蚁群算法进行优化
def improved_ant_colony_algorithm(dijkstra_path, graph):
# ...(此处省略具体实现代码)... # 对次优路径进行蚁群优化调整
return optimized_path # 返回优化后的路径信息
注意:以上内容仅为文章内容及示例代码展示之用,具体实现时需要根据实际情况进行调整和优化。
精彩内容直达: 【蚁群算法】/改进蚁群算法/Dijkstra算法/遗传算法/人工势场法实现二维/三维空间路径规划 本程序为蚁群算法+Dijkstra算法+MAKLINK图
















 421
421

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









