






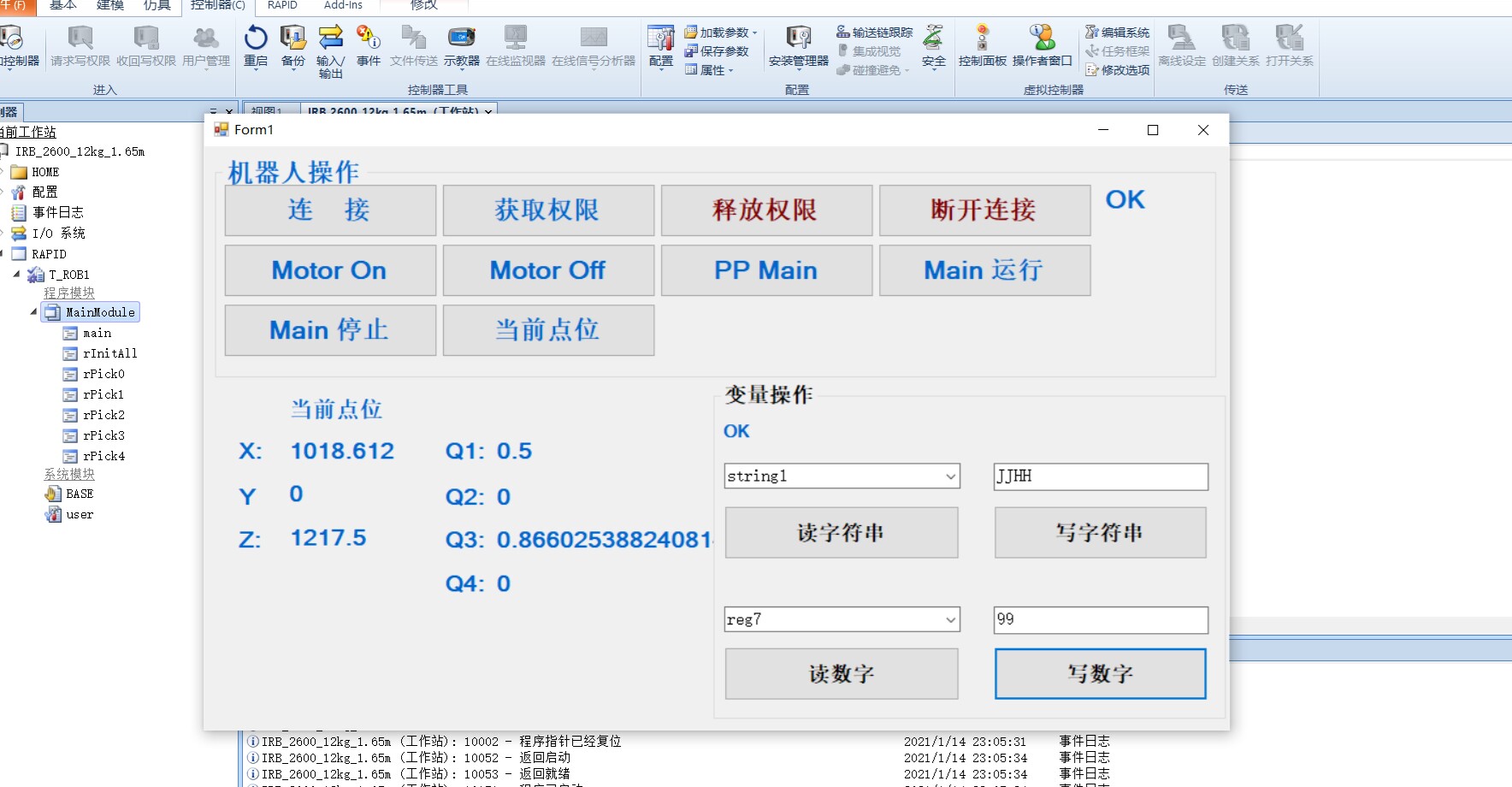
ABB机器人二次开发 C#读取和写入数据,可以获取点位信息及写入点位信息。
自己写的ABB机器人类,机器人常规操作功能都有,非常适合进行二次开发。
YID:3717635959328320
最后一只烤鸭



探索ABB机器人二次开发之旅:C#读取与写入数据的新篇章
在这个充满机遇的数字化时代,机器人技术不断向前推进,尤其是在工业自动化领域。作为一名热爱技术的研究者,我们有机会深入探索ABB机器人的二次开发,利用C#语言进行数据读取和写入操作。今天,我们将一起走进这个充满挑战与乐趣的领域。
一、引子
在我们眼前的是一台拥有常规操作功能的ABB机器人,它的灵活性、精确性和可靠性为我们提供了二次开发的良好基础。通过C#语言,我们可以更加方便地读取和写入机器人的点位信息,为工业自动化流程注入更多可能。
二、走进二次开发的神秘世界
作为一位编程者,面对如此强大的机器人类,首先需要对机器人的结构和通信接口有一定的了解。在这里,我们将主要讨论C#与ABB机器人之间的通信方式,以及如何利用C#进行数据读取和写入操作。
三、C#与ABB机器人的通信桥梁
要实现C#与ABB机器人的通信,我们需要借助相应的通信协议和接口。通常,这些接口可以通过以太网或现场总线等方式与C#程序进行连接。一旦连接建立,我们就可以开始读取和写入机器人的点位信息了。
四、读取和写入点位信息
点位信息是机器人执行任务的关键数据。通过C#程序,我们可以轻松地读取这些信息,并根据需要进行处理和存储。同时,我们还可以将新的点位信息写入机器人,实现机器人的灵活操控和自主导航。
示例代码(C#):
// 读取点位信息
var position = robot.ReadPosition(); // 假设robot是已连接的ABB机器人对象
// 处理读取到的点位信息...
// 写入新的点位信息
robot.WritePosition(newPosition); // newPosition是新的点位信息变量
这段代码只是一个简单的示例,具体的实现会因项目需求和环境配置而有所不同。在编程过程中,我们需要注意通信协议的选择、数据格式的转换以及异常处理等问题。
五、体验与反思
经过一番学习和实践,我们可以亲身体验到ABB机器人二次开发的魅力所在。不仅可以加深对机器人技术和自动化控制的理解,还能将所学的知识和技能应用于实际项目中。在这个过程中,我们会遇到各种挑战和问题,但正是这些挑战和问题推动我们不断前进,成长为更加优秀的开发者。
六、结语
在未来的日子里,我们将继续探索ABB机器人二次开发的更多可能性。无论是提高机器人的性能、优化工作流程还是开发新的应用场景,C#语言都将是我们不可或缺的伙伴。让我们携手共进,为工业自动化领域的发展贡献自己的力量!
全部资料,即得: ABB机器人二次开发 C#读取和写入数据,可以获取点位信息及写入点位信息。 自己写的ABB机器人类,机器人常规操作功能都有,
















 660
660

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









