







在(二)中,我们已经得到了相机的畸变参数,利用这参数纠正图像原理十分简单,不再赘述。本文主要介绍如何实现批量的畸变纠正,同时实时显示处理进度,程序运行界面如图1所示
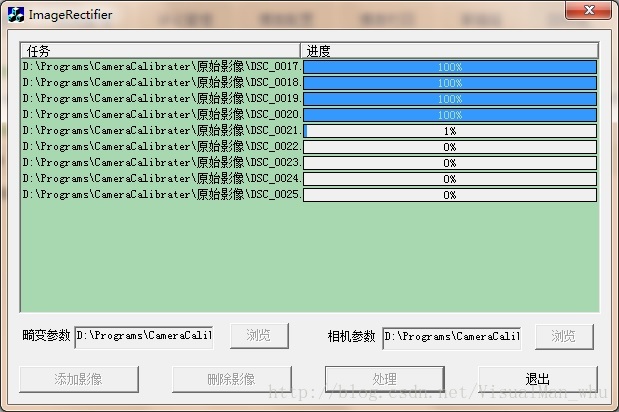
图 1. 图像畸变纠正程序运行界面
在ImageRectifier中,我们需要输入畸变参数和相机参数,然后把同一相机拍摄的多幅图像一次性输入,即可批量进行处理。程序附带了处理进度条,运行情况一目了然。
本程序的实现,最关键的是多线程的运用。我们可以在前端实时观看程序处理进度,同时程序后台不断地处理图像。前端的处理进度显示和后台的处理结果通过消息传递关联起来。下面我们首先简要介绍工作线程的原理,然后介绍本程序具体实现思路。
一、工作线程原理介绍
参考《Visual C++面向对象编程教程(第二版)》(清华大学出版社)
二、利用工作线程实现进度显示和后台处理的关联
我们的思路是这样的,用户启动任务后,我们在主程序中启动一个线程函数,并把图像处理的任务交给这个线程函数,由它在后台执行,执行过程中不断发送消息给前端的主线程,前端的主线程一旦接收到消息则更新当前执行进度条。
1、消息和消息响应函数的关联(黑体显示):
BEGIN_MESSAGE_MAP(CImageRectifierDlg, CDialog)
//{{AFX_MSG_MAP(CImageRectifierDlg)
ON_MESSAGE(WM_USERMSG,OnMyMessage)
//}}AFX_MSG_MAP
END_MESSAGE_MAP()
2、WM_USERMSG的定义
#define WM_USERMSG WM_USER+100
这样做的目的是为了避免和其他消息数值冲突
3、OnMyMessage()是对话框类CImageRectifierDlg的成员函数,在该函数中完成进度条的更新
LRESULT CImageRectifierDlg::OnMyMessage(WPARAM wParam, LPARAM lParam)
{
CString str;
str.Format("%d",lParam);
str += "%";
this->m_path_imgfile.SetItemText(wParam,1,str);
this->m_path_imgfile.Update(wParam);
return 1;
}UINT MyWorkThread(LPVOID pParam)
{
CImageRectifierDlg* dlg = (CImageRectifierDlg*) pParam;
CvMat *intrinsic_matrix = cvCreateMat(3,3,CV_32FC1);
CvMat *distortion_coeffs = cvCreateMat(4,1,CV_32FC1);
CV_MAT_ELEM(*intrinsic_matrix,float,0,0) = dlg->f1;
CV_MAT_ELEM(*intrinsic_matrix,float,0,1) = 0;
CV_MAT_ELEM(*intrinsic_matrix,float,0,2) = dlg->x0;
CV_MAT_ELEM(*intrinsic_matrix,float,1,0) = 0;
CV_MAT_ELEM(*intrinsic_matrix,float,1,1) = dlg->f2;
CV_MAT_ELEM(*intrinsic_matrix,float,1,2) = dlg->y0;
CV_MAT_ELEM(*intrinsic_matrix,float,2,0) = 0;
CV_MAT_ELEM(*intrinsic_matrix,float,2,1) = 0;
CV_MAT_ELEM(*intrinsic_matrix,float,2,2) = 1;
CV_MAT_ELEM(*distortion_coeffs,float,0,0) = dlg->k1;
CV_MAT_ELEM(*distortion_coeffs,float,1,0) = dlg->k2;
CV_MAT_ELEM(*distortion_coeffs,float,2,0) = dlg->p1;
CV_MAT_ELEM(*distortion_coeffs,float,3,0) = dlg->p2;
IplImage *image = cvLoadImage(dlg->filepaths.at(0));
IplImage *mapx = cvCreateImage(cvGetSize(image),IPL_DEPTH_32F,1);
IplImage *mapy = cvCreateImage(cvGetSize(image),IPL_DEPTH_32F,1);
cvInitUndistortMap(intrinsic_matrix,distortion_coeffs,mapx,mapy);
int i=0;
CString str;
for (i=0;i<dlg->filepaths.size();i++)
{
PostMessage(dlg->m_hWnd,WM_USERMSG,i,1);
str = dlg->filepaths.at(i);
image = cvLoadImage(str);
IplImage *t = cvCloneImage(image);
cvRemap(t,image,mapx,mapy);
cvSaveImage(str+"Rectify.tif",image);
cvReleaseImage(&t);
PostMessage(dlg->m_hWnd,WM_USERMSG,i,100);
}
PostMessage(dlg->m_hWnd,WM_USERMSG,0,100);
return 1;
}另外非常重要的一点,我们的线程函数是全局函数,而消息响应函数却是对话框类CImageRectifier的成员函数,他们如何关联的呢?是通过线程函数的参数LPVOID型的pParam来实现的。具体地,我们在CImageRectifier::OnOK()中启动线程时是这样启动的:thread = AfxBeginThread(MyWorkThread,(LPVOID)this),这就把对话框对象本身的指针作为参数传给了线程函数MyWorkThread,于是在MyWorkThread中,我们就可以把消息发送给这个指针,最终让对话框本身接收并处理消息。















 2096
2096

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









