






基于A* 算法的无人机三维路径规划算法,MATLAB编程实现。
ID:5320709412869908
灵犀Mr_p
无人机的应用越来越广泛,从物流、农业到安防等领域,都能看到无人机的身影。而无人机的路径规划算法是保证其飞行安全和效率的重要组成部分。本文基于A*算法,结合MATLAB编程实现,介绍了一种无人机的三维路径规划算法。
无人机的三维路径规划算法需要考虑多个因素,如地形、障碍物、飞行速度等。A算法是一种广泛应用于路径规划领域的启发式搜索算法,它通过评估每个节点的启发式函数值,选择最优的路径。在无人机路径规划中,A算法的启发式函数可以根据无人机的当前位置和目标位置,估计出到达目标的最短路径。
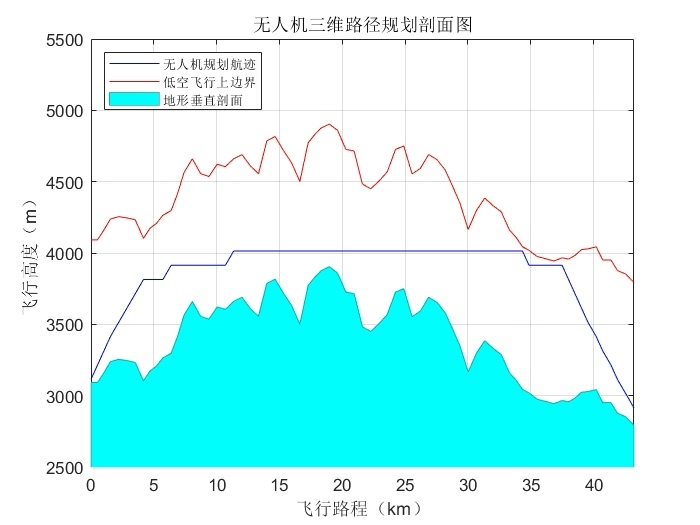
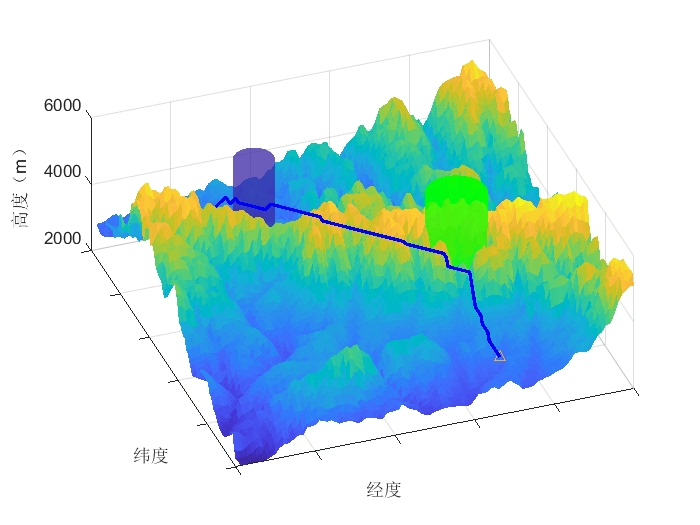
在MATLAB编程实现中,首先需要定义无人机的地图和起始点、目标点。地图可以通过三维点云数据表示,每个点的高度信息代表地形的高度。起始点和目标点的坐标可以通过GPS定位或其他手段获取。然后,根据A*算法的原理,计算出无人机的最短路径。
路径规划过程中,需要考虑障碍物对无人机飞行的影响。可以通过建立障碍物的模型,并在算法中进行判断和避障。当无人机遇到障碍物时,算法会重新选择路径,确保无人机安全绕过障碍物。
在实际应用中,无人机的飞行速度也是需要考虑的因素。飞行速度过快可能导致无人机过早发现障碍物而无法及时避让,飞行速度过慢则会影响任务的完成效率。因此,我们需要根据无人机的性能和任务需求,合理选择飞行速度。
除了基本的A算法,还可以进行一些优化和改进。例如,可以引入遗传算法对A算法进行优化,以提高路径规划的效率。同时,可以结合无人机的动力学模型,考虑无人机的飞行动力学特性,提高路径规划的精确性和适应性。
综上所述,本文基于A*算法,结合MATLAB编程实现了一种无人机的三维路径规划算法。通过考虑地形、障碍物和飞行速度等因素,该算法能够高效、安全地规划无人机的飞行路径。在实际应用中,可以根据具体需求进行优化和改进,提高路径规划的效率和精确性。希望本文对无人机的路径规划算法研究能够提供一定的参考和借鉴。
【相关代码,程序地址】:http://fansik.cn/709412869908.html
















 485
485

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









