






基于动态窗口算法的AGV仿真避障
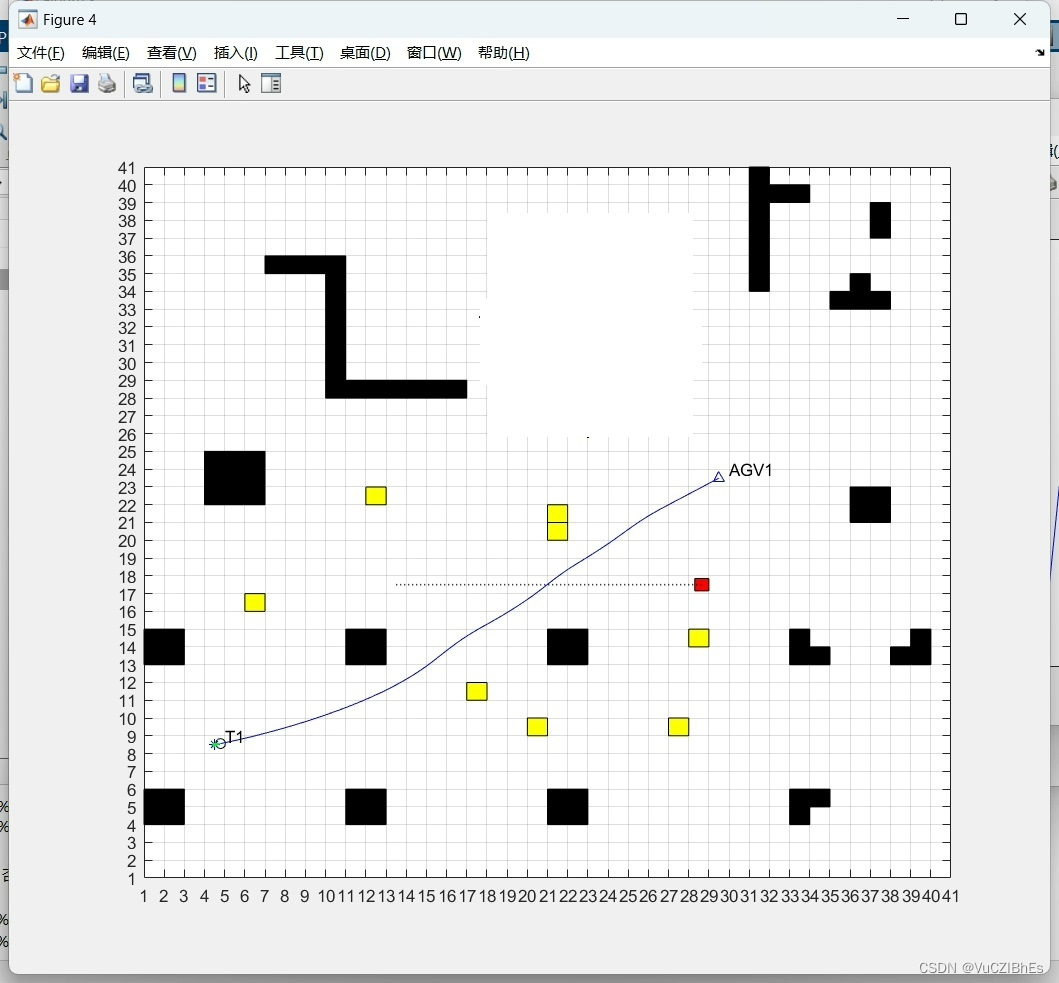
可设置起点目标点,设置地图,设置移动障碍物起始点目标点,未知静态障碍物
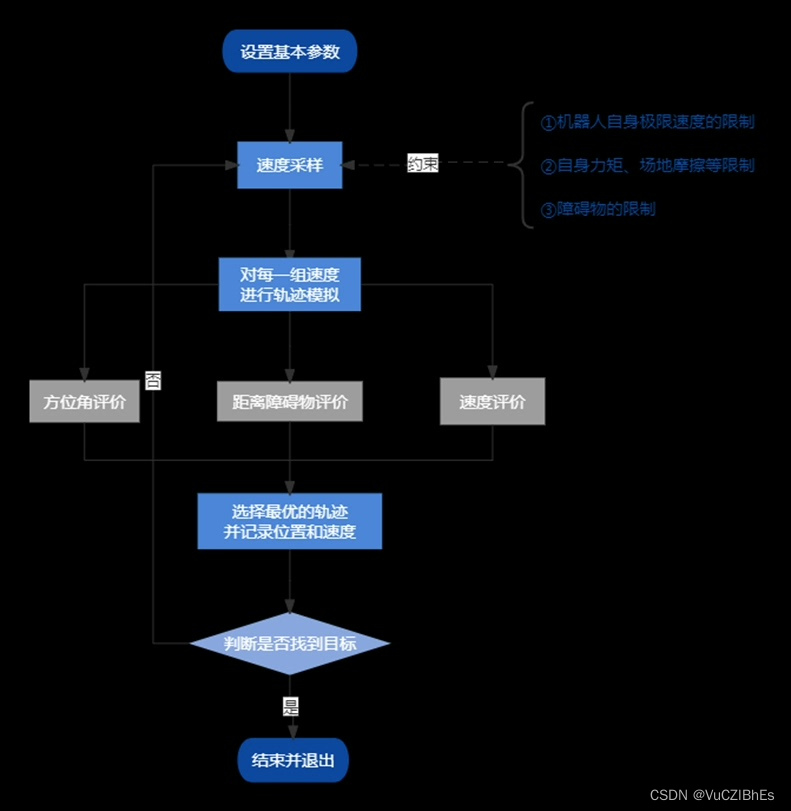
动态窗口方法(DynamicWindowApproach) 是一种可以实现实时避障的局部规划算法,通过将轮式机器人的位置约束转化为速度约束,根据约束进行速度采样,并由一系列的选定速度的动作生成轨迹,结合评价函数选择评分最高的轨迹,实现执行最优速度的问题。
黄色是静态障碍物,红色是可移动障碍物
基于动态窗口算法的AGV仿真避障
摘要: 本文介绍了基于动态窗口算法实现的AGV(自动导引车)仿真避障系统。该系统可以通过设置起点和目标点、设置地图以及设置移动障碍物的起始点和目标点,来对未知静态障碍物进行实时避障。动态窗口方法是一种局部规划算法,通过将轮式机器人的位置约束转化为速度约束,并根据约束进行速度采样。该算法通过生成一系列选定速度的动作来生成轨迹,并结合评价函数选择评分最高的轨迹,从而实现执行最优速度的问题。
-
引言 AGV作为一种智能自动化设备在物流、制造、医疗等领域得到广泛应用。在实际应用中,AGV需要能够在复杂环境中准确地避开障碍物,以保证安全和效率。本文基于动态窗口算法提出了一种AGV仿真避障方法,提高了AGV的避障能力。
-
系统设计与实现 2.1 系统架构 本系统主要由地图生成模块、起点和目标点设置模块、动态窗口算法模块以及仿真展示模块组成。其中,地图生成模块负责生成随机地图,起点和目标点设置模块允许用户设置AGV的起点和目标点,动态窗口算法模块基于AGV的位置约束生成速度约束,并根据评价函数选择最优轨迹,最后仿真展示模块将绘制出AGV在地图中的运动轨迹。
2.2 动态窗口算法 动态窗口算法是一种常用的局部规划算法,它通过将机器人的位置约束转化为速度约束,来解决避障问题。具体步骤如下:
- 生成速度采样窗口:根据机器人的最小和最大速度、最小和最大转向角度等参数,生成速度采样窗口。
- 评价函数计算:对速度采样窗口中的每个速度采样点,计算评价函数的值,评价函数一般包括与目标点距离、与障碍物距离等因素。
- 选择最优速度:根据评价函数的值,选择评分最高的速度作为机器人的目标速度。
- 轨迹生成:根据目标速度和机器人的当前状态,生成一系列选定速度的动作,从而得到机器人的轨迹。
-
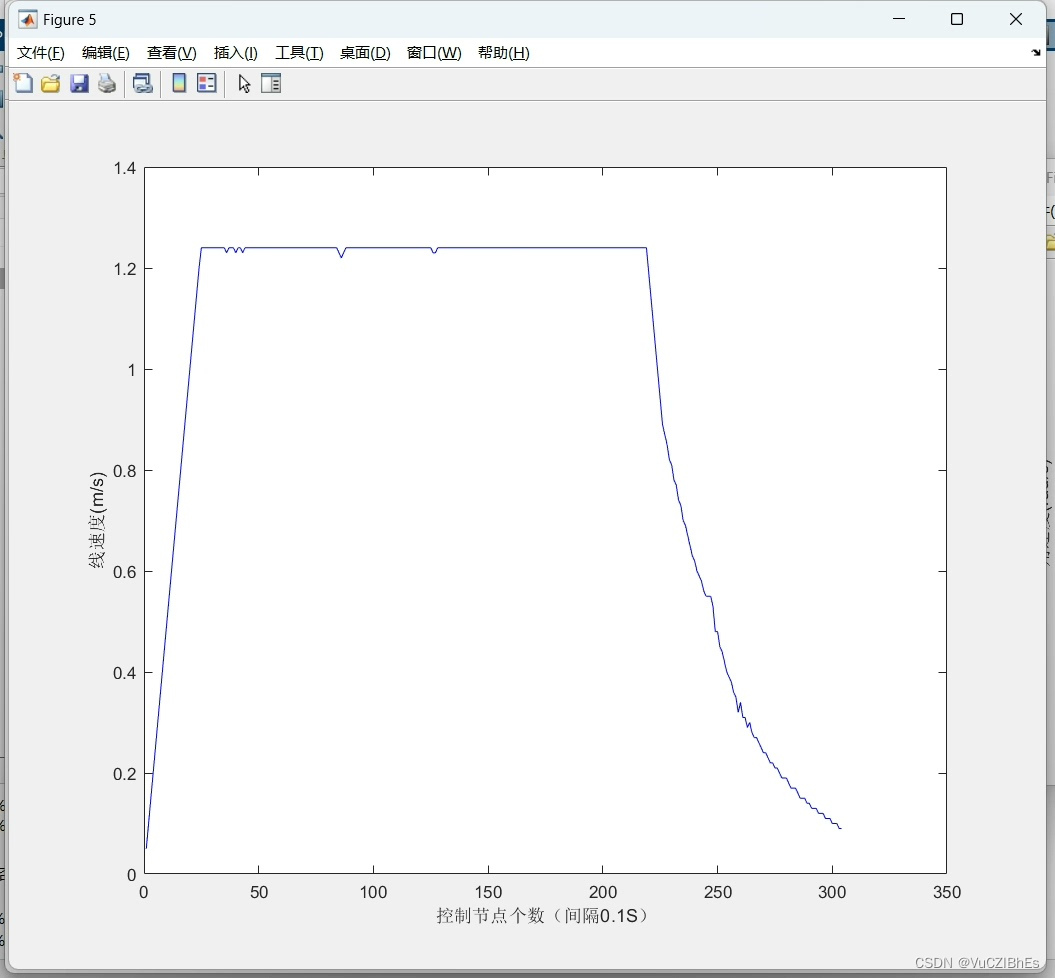
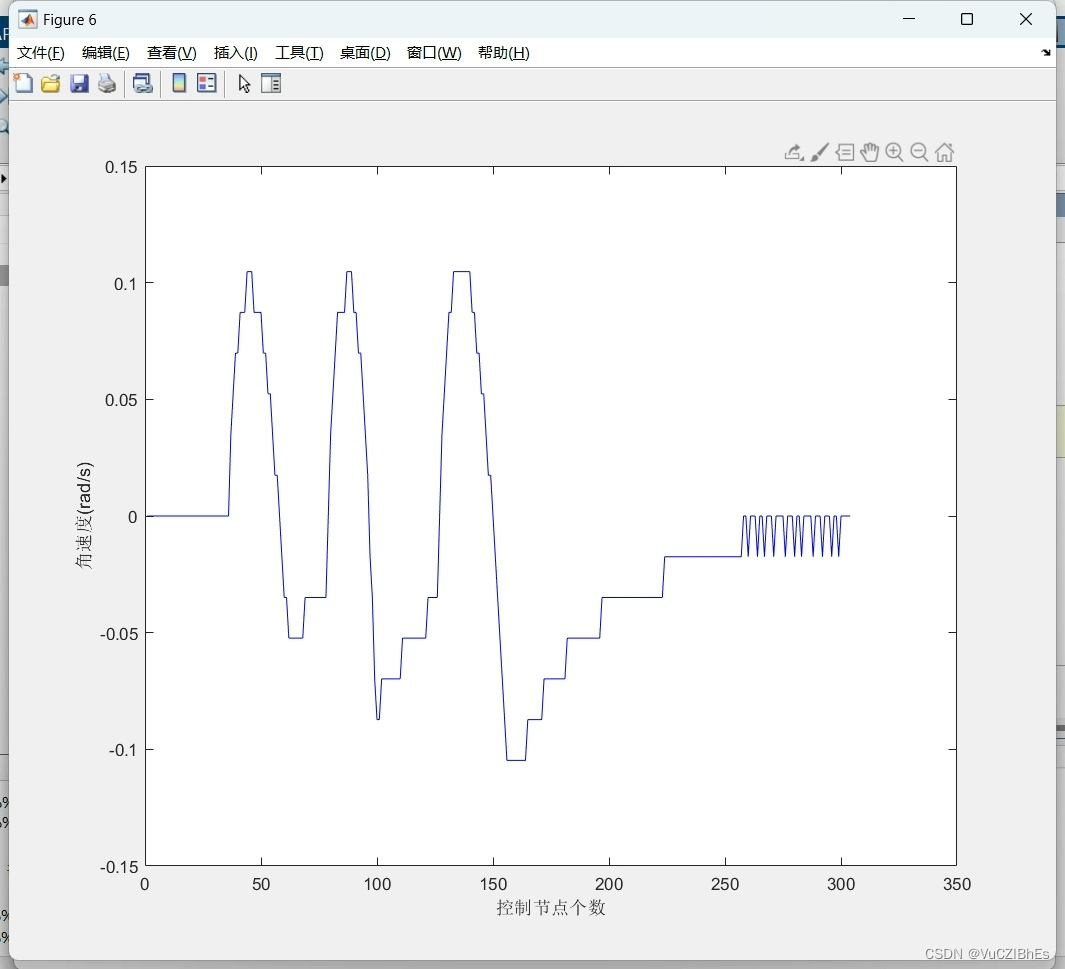
实验结果与分析 本系统通过在不同地图上进行多组实验,验证了动态窗口算法在AGV避障方面的有效性。实验结果显示,该算法能够快速且准确地避开障碍物,并找到最优的路径。同时,该算法对于复杂环境中的静态障碍物和移动障碍物具有很好的适应性。
-
结论 本文基于动态窗口算法提出了一种AGV仿真避障系统,并通过实验证明了该系统在避障方面的有效性。该系统可以帮助AGV在复杂环境中高效且安全地进行导航和运输任务。未来的研究可以进一步优化算法,并在实际场景中进行验证。
相关代码,程序地址:http://lanzouw.top/709436275944.html















 316
316











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









