







一.系统概述
本次设计的系统是以 STM32 单片机作为核心控制器,可以控制超声波模块完成对位置信息的采集,并且可以将采集到的位置信息在显示屏上进行显示,可以按键对位置距离进行设定,当采集到的位移超过闽值后控制蜂鸣器报警,同时显示屏显示报警信息。

二.仿真概述
1. 系统通过HC-SR04进行超声波测距,检测到的距离和设置的阈值会在OLED显示屏上显示。当检测到检测的距离超过设定的距离就会控制蜂鸣器进行报警。
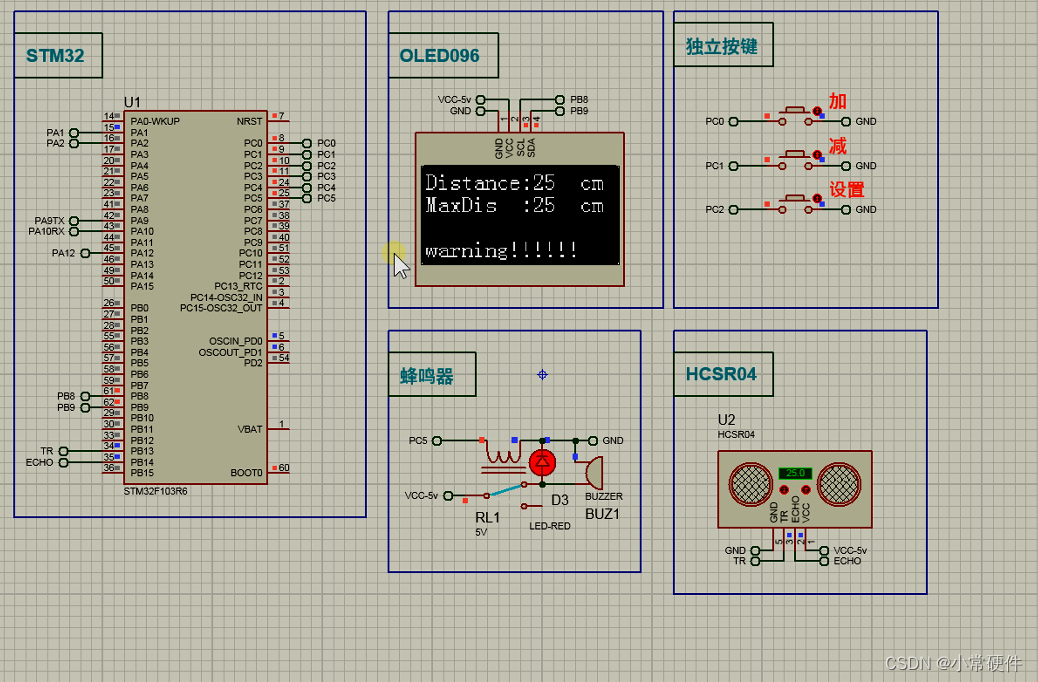
2. 通过按键进行距离阈值的设定,设置按键按下就会进入阈值设定模式,然后按下加减按键就会实现阈值的调节。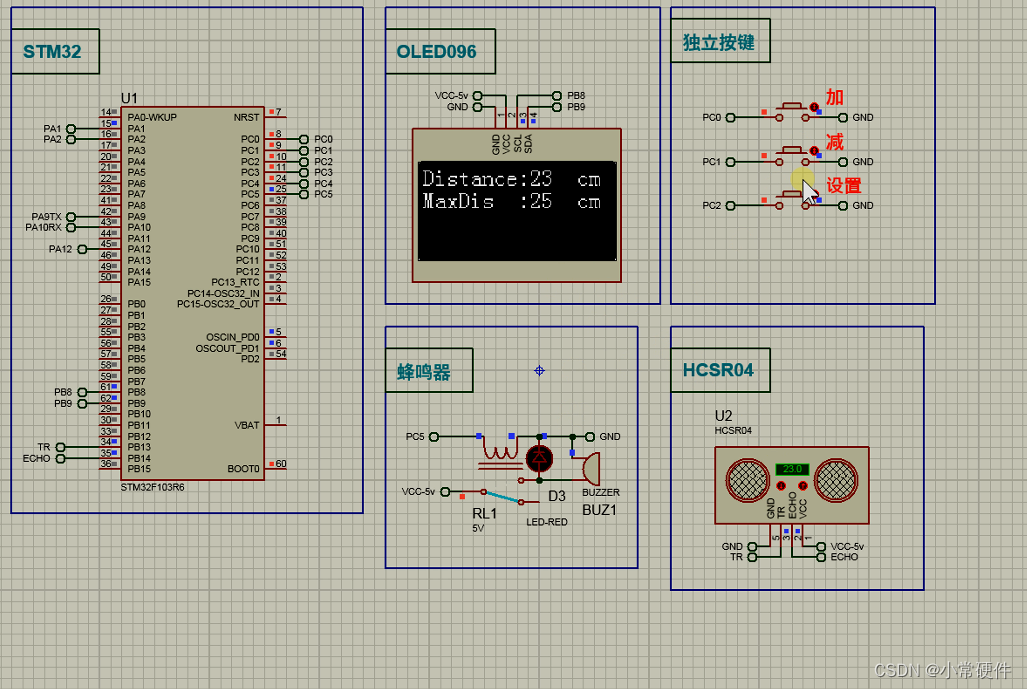
三.仿真设计
#include <main.h>
//
u8 Key;//按键检测
u8 beep=0;
u8 m=0;u8 w=0;
u8 set;
float distance;
u8 cm1=25,cm2=20,cm3=15;
//
//
void Init_Test(void);
void Display(void);
//
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//2:2
Init_Test();
while(1)
{
//getdat
Key_Scan(&Key); //OLED_ShowNum(1,16,Key,1);
Hcsr04GetLength(&distance);OLED_ShowString(1,14,"cm");//OLED_ShowString(2,14,"cm");
//set
if(Key==3) {Key=0;set++; if(set>1) set=0;}
if(set!=0) OLED_ShowString(2,14,"Set");
else OLED_ShowString(2,14,"cm");
if(set==1)
{
OLED_ShowString(2,10," ");
if(Key==1&&set==1){ Key=0; cm1++; }
if(Key==2&&set==1){ Key=0; cm1--; }
}
//display
OLED_ShowString(1,1,"Distance:");OLED_ShowNum(1,10,distance,2);
OLED_ShowString(2,1,"MaxDis :");OLED_ShowNum(2,10,cm1,2);
if(distance>=cm1){ Beep_1;OLED_ShowString(4,1,"warning!!!!!!");delay_ms(500);OLED_ShowString(4,1," "); }
else { Beep_0;OLED_ShowString(4,1," "); }
}
}
















 1184
1184











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











