







一.系统概述
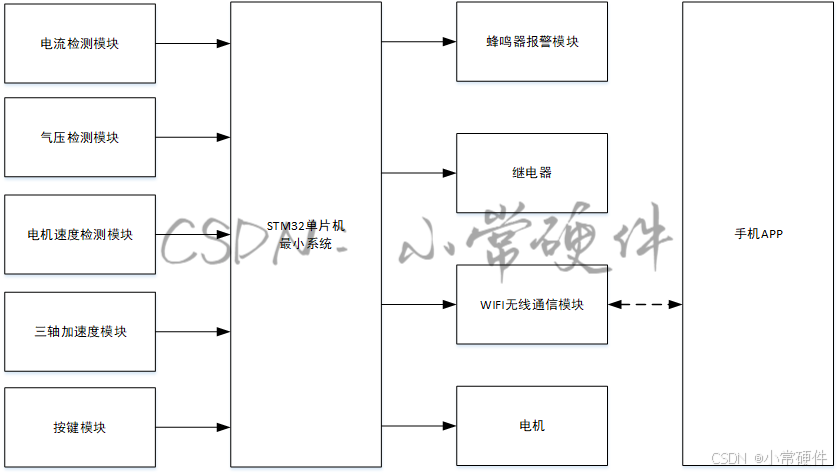
1. 系统以STM32单片机为核心控制器,实现电流、风速、电机转速和倾斜角度的多参数采集。
2. 集成电流传感器实现电流数据采集,并通过继电器控制电流切断保护。
3. 气压传感器用于风速检测,超过设定值时通过继电器切断风轮。
4. 三轴加速度传感器监测发电杆倾斜角度,检测到异常时触发蜂鸣器报警并切断风轮。
5. 数据通过STM32单片机发送至手机APP进行实时显示和远程监控。
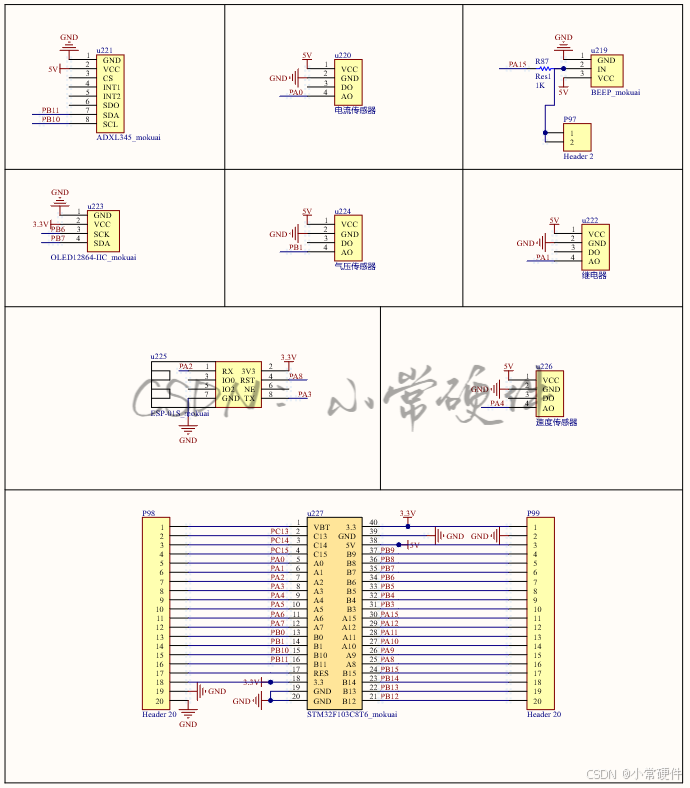
二.电路设计
电路图采用Altium Designer进行设计:
1. 通过STM32F103C8T6单片机作为系统主控,最小系统电路是整个电路的核心;
2. 使用XGZP6847气压检测模块进行气压检测,将模块的模拟输出口接单片机的ADC输入口;
3. 通过光耦测速模块进行电机速度检测,模块输出的数字信号接单片机的GPIO口;
4. 使用ADXL345加速度传感器进行晃动检测,并采用IIC总线与单片机进行通信。
5. 使用EG8542电流检测模块进行电流检测,并将模块的模拟输出端与单片机ADC输入端相接;
6. 通过ESP8266-01S将检测到数据上传到上位机,通过UART串口与单片机进行通信;
7. 通过继电器控制充电的开关,并将继电器的数据输出脚与单片机的GPIO脚进行连接。
8. 使用蜂鸣器进行报警,蜂鸣器采用的有源蜂鸣器,使用NPN三极管进行蜂鸣器进行驱动。
三.程序设计
#include "sys.h"
#include "delay.h"
//#include "adc.h"
#include "math.h"
#include "key.h"
#include "OLED_I2C.h"
//#include "Beep_Led_Relay.h"
#include "Control_Report_To_Police.h"
/************************************************
版权:小常硬件
公众号:微信搜索“小常硬件“在公众号免费下载相关资料
************************************************/
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
delay_init(); //延时函数初始化
Beep_init();
Beep=1;
TIM4_Init(300,7200); //定时器初始化
OLED_Init(); //OLED初始化
Adc_Init();
Adc_Init1();
SD_Init();
TIM2_init(30000,7200);
Relay_init();
Relay_0=1;
Relay_1=1;
ADXL345_IIC_GPIO_Init();
OLED_CLS(); //OLED清屏
OLED_ShowCN(32,2,0); //小常硬件
OLED_ShowCN(32+16,2,1);
OLED_ShowCN(32+32,2,2);
OLED_ShowCN(32+32+16,2,3);
delay_ms(500);
OLED_CLS();
ALi_ESP8266_GPIO_Init();
MQTT_Buff_Init();
AliIoT_Parameter_Init();
// /*******显示汉字**********/
OLED_ShowCN(0,0,10);
OLED_ShowCN(16,0,11); //电流
OLED_ShowCN(0,2,12);
OLED_ShowCN(16,2,13); //风速
OLED_ShowCN(0,4,14);
OLED_ShowCN(16,4,15); //转速
OLED_ShowCN(0,6,16);
OLED_ShowCN(16,6,17); //角度
while(1)
{
OLED_Display_Cotrol(); //显示控制函数
}
}
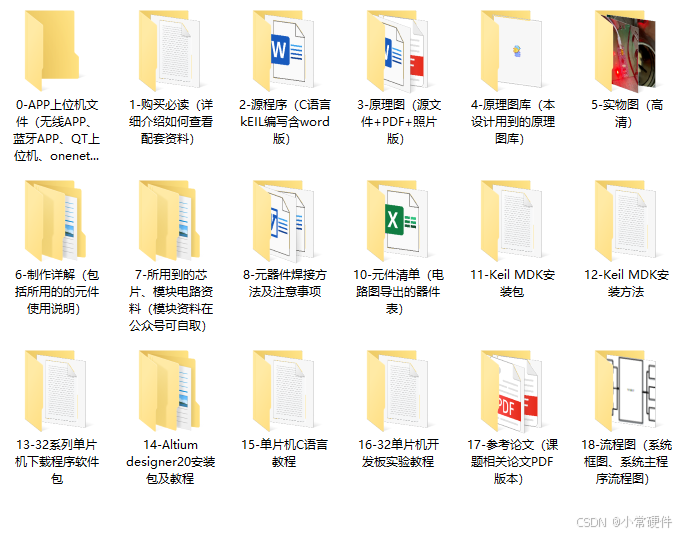
四.资料内容


















 1281
1281

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











