






1.PCL安装(略过)
参考:PCL入门笔记 - PCL 1.13.0 的安装和配置(Windows) | FunnyWii Zone
如果配过环境,只需要将PCL1.13.props文件加到属性管理器里,找到 Debug | x64,右键打开后选择添加现有属性表:
2.MFC显示点云
参考在c++MFC下用PCL显示操作点云文件 MFC对话框显示操作PCL点云-腾讯云开发者社区-腾讯云 (tencent.com)
2.1控件添加
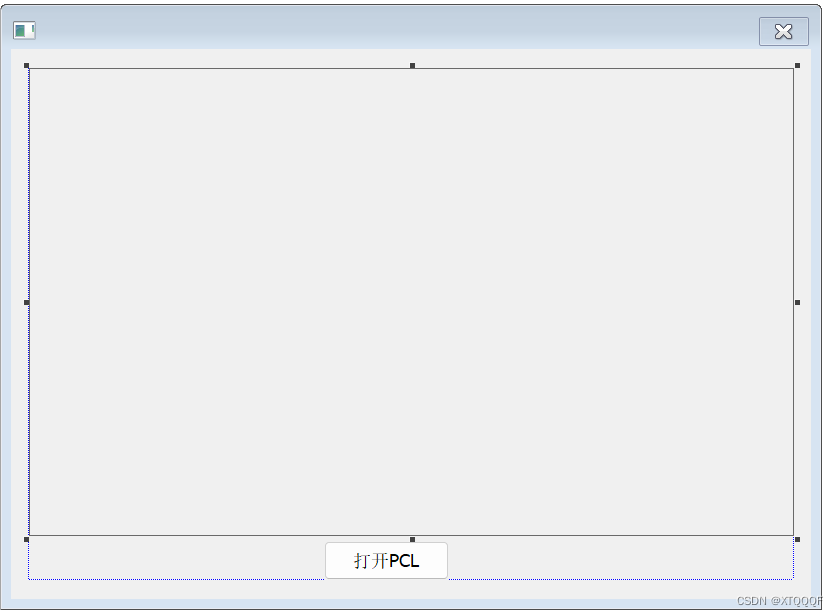
首先添加一个pictrue_control控件,在属性里改ID为IDC_PCDVIEW,添加变量,名称改为m_pcl_view,后面再添加一个按钮控件改名为“打开PCL”。ps:不要写成下面变量名称m_viewer,否则报错,如下图。
![]()

2.2添加头文件
在项目的dlg.h文件添加如下头文件
#include <pcl/console/parse.h>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/common/io.h>
#include <pcl/visualization/pcl_visualizer.h>
//vtk
#include <vtkRenderWindow.h>
#include <vtkRenderWindowInteractor.h>
#include "vtkAutoInit.h"
VTK_MODULE_INIT(vtkRenderingOpenGL); // VTK was built with vtkRenderingOpenGL2
VTK_MODULE_INIT(vtkInteractionStyle);
using namespace pcl;并且在这个的dlg.h文件类CStatic m_pcl_view(前面窗口变量名)后面添加:
private:
CStatic m_pcl_view;
boost::shared_ptr<pcl::visualization::PCLVisualizer> m_viewer;//要共享指针类型的,要不然,显示窗口会跳出MFC界面
vtkRenderWindow* m_win; //vtk渲染的窗口句柄
vtkRenderWindowInteractor* m_iren;//vtk交互的对象 头文件添加完编译成功
2.3源文件
在dlg.cpp文件的OnInitDialog()初始化函数下(TODO和return之间)添加。
// 设置此对话框的图标。 当应用程序主窗口不是对话框时,框架将自动
// 执行此操作
SetIcon(m_hIcon, TRUE); // 设置大图标
SetIcon(m_hIcon, FALSE); // 设置小图标
// TODO: 在此添加额外的初始化代码
//pcl显示窗口初始化
m_viewer.reset(new pcl::visualization::PCLVisualizer("viewer", false));//初始化viewer对象
m_viewer->addCoordinateSystem(); //设置对应的坐标系
m_viewer->setBackgroundColor(0, 0, 0);//设置背景颜色
m_viewer->initCameraParameters();//初始化相机的参数
m_win = m_viewer->getRenderWindow();//将view中的渲染窗口的句柄传递给vtk window
m_iren = vtkRenderWindowInteractor::New(); //初始化vtkwindow交互的对象
m_viewer->resetCamera();//使点云显示在屏幕中间,并绕中心操作
CRect rect;
GetClientRect(&rect);//实时获取MFC窗口大小
m_win->SetSize(rect.right - rect.left, rect.bottom - rect.top);//根据当前窗口的大小设置vtk 窗口的大小
CWnd* viewer_pcWnd;
viewer_pcWnd = this->GetDlgItem(IDC_PCDVIEW);//获取对应的wnd
m_win->SetParentId(viewer_pcWnd->m_hWnd);//设置vtk窗口的句柄
m_iren->SetRenderWindow(m_win);//将vtk交互对象与vtk window绑定
m_viewer->createInteractor();
m_win->Render();//开始渲染
return TRUE; // 除非将焦点设置到控件,否则返回 TRUE双击“打开PCL”按钮进入按钮事件,添加如下代码。
CString strFile = _T("");
CFileDialog dlgFile(TRUE, NULL, NULL, OFN_HIDEREADONLY, _T("Describe Files (*.pcd)|*.pcd|All Files (*.*)|*.*||"), NULL);
if (dlgFile.DoModal())
{
strFile = dlgFile.GetPathName();
//Cstring 转string
CString theCStr;
std::string STDStr(CW2A(strFile.GetString()));
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new
pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>(STDStr, *cloud) == -1)//*打开点云文件
{
AfxMessageBox(_T("读入点云数据失败"));
}
m_viewer->removeAllPointClouds();//将前一次点云移除
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> single_color(cloud, 0, 255, 0);
m_viewer->addPointCloud<pcl::PointXYZ >(cloud, single_color, "sample cloud");
}编译运行出错,
 只需将在dlg.cpp文件的如下代码注释即可运行成功
只需将在dlg.cpp文件的如下代码注释即可运行成功
//#ifdef _DEBUG
//#define new DEBUG_NEW
//#endif
3.运行结果
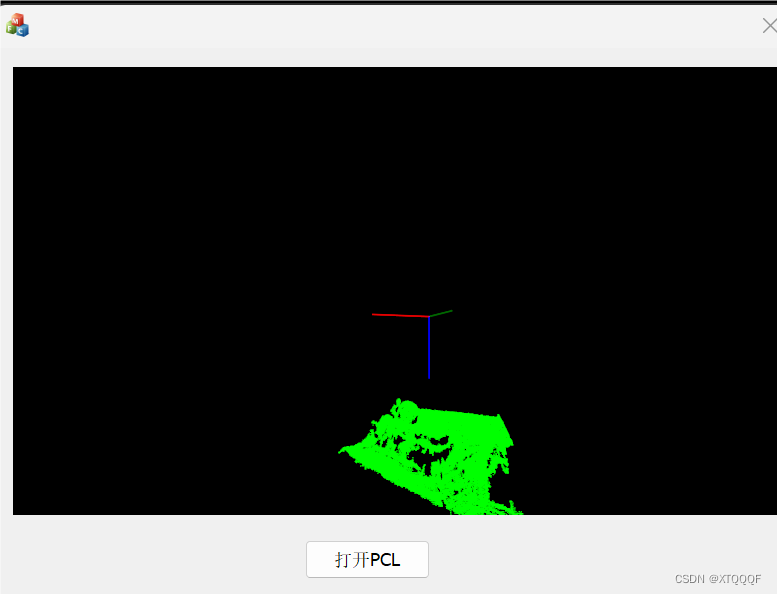
编译成功

运行结果如下所示,点击“打开PCL”按钮,会进入文件目录,选择pcd文件打开如图所示。ps:好像只支持pcd文件,运行ply文件会崩溃出错
















 2302
2302











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









