







概述
创新点:
- 多人场景 无遮挡处理
- 以3DGS进行表达
方法:
环境配置
基本和3DGS的配置差不多…
pip install torch==1.13.1+cu117 torchvision --index-url https://download.pytorch.org/whl/cu117
pip install hydra-core==1.3.2
pip install pytorch-lightning==2.1.2
pip install imageio
pip install ./submodules/diff-gaussian-rasterization
pip install ./submodules/simple-knn
pip install git+https://github.com/NVlabs/tiny-cuda-nn/#subdirectory=bindings/torch
子模块记得 git clone --recursive 多次踩坑…
tinycudann建议先git到本地…
数据准备
|---data
| |---Gala
| |---PeopleSnapshot
| |---smpl
下载以后挨个解压,整理成👆格式
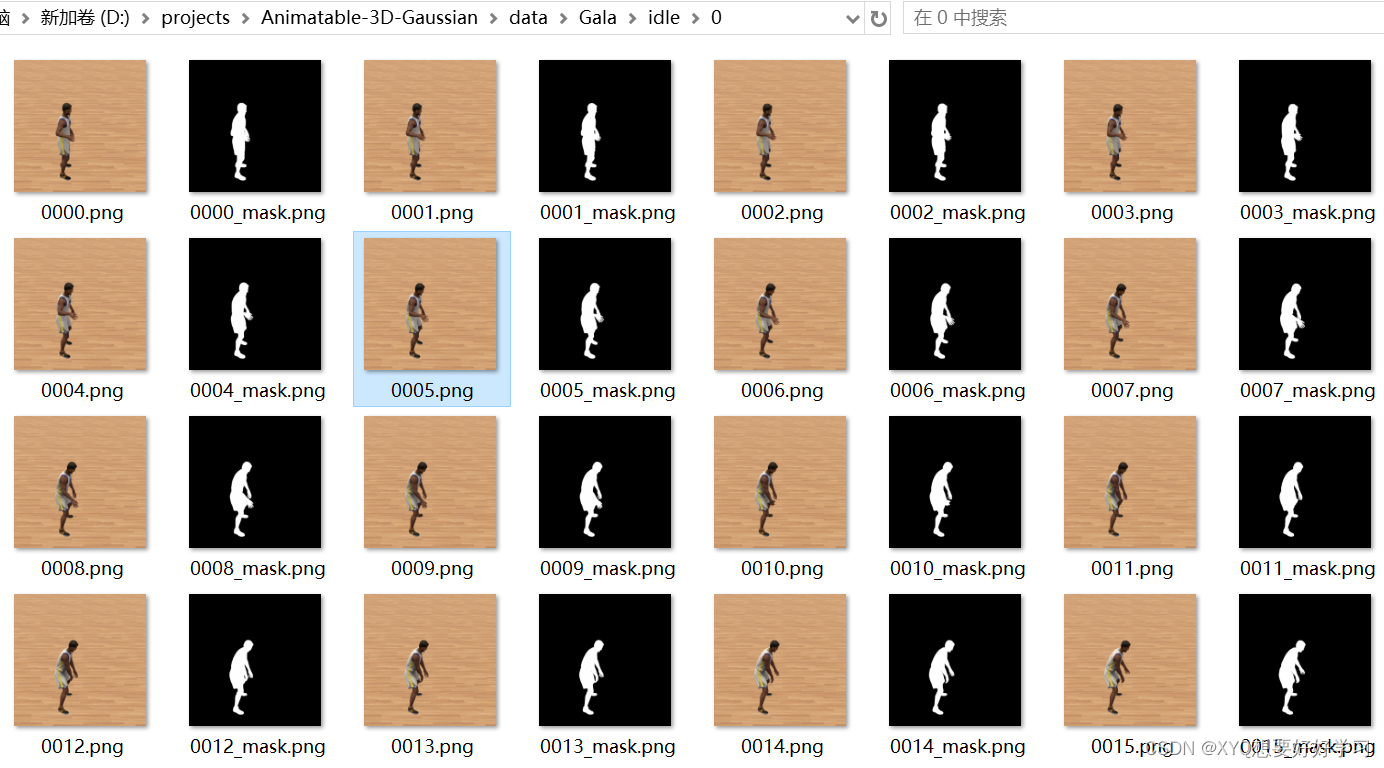
单个数据集结构:

0-6代表不同相机序号——同一视频的不同视角
每个文件夹均有对应的300帧+300mask。
bg定义了7个相机视角下的背景,目前还不知道有什么用,后续看看…

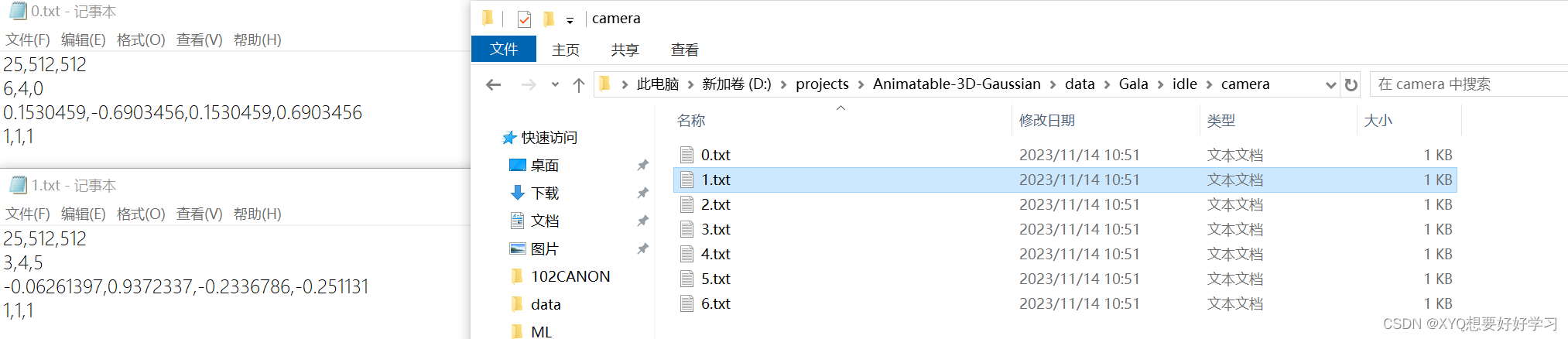
camera文件夹下是7个文本文件,描述相机参数。具体的表示在【pytorch】Animatable 3D Gaussian+源码解读(二)中分析。
pose文件夹下是300个文本文件,分别描述300帧中300个pose。
此外,Gala数据集中还有一个名为model的文件夹需要注意:
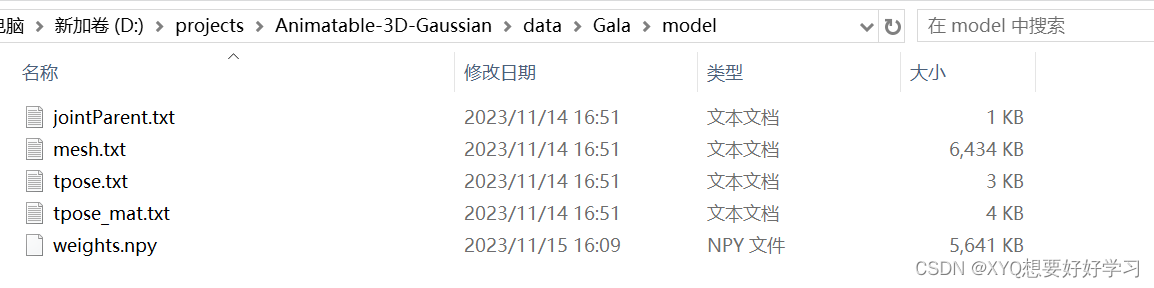
应该是定义了人体标准模板,包括网格、tpose、蒙皮权重等…
model_path (str) : The path to the folder that holds the vertices, tpose matrix, binding weights and indexes.
数据集具体是怎么利用的我们再结合代码来看看…
代码解读
先跟着debug走一遍流程… 然后再以面向对象的思路把握全局
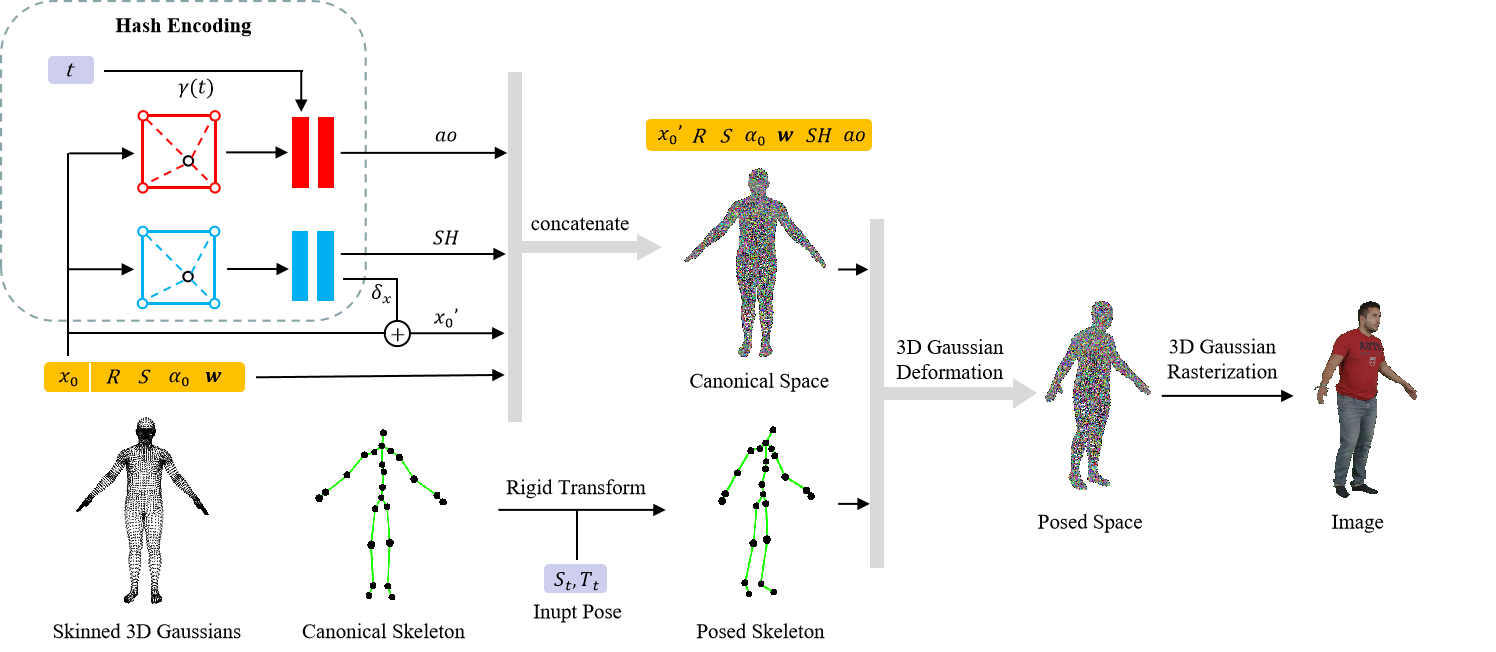
Define Gaussian
首先定义场景表达元素:高斯球
train.py:
model = NeRFModel(opt)
nerf_model.py:
class NeRFModel(pl.LightningModule):
def __init__(self, opt):
super(NeRFModel, self).__init__()
self.save_hyperparameters() # 储存init中输入的所有超参
self.model = hydra.utils.instantiate(opt.deformer)
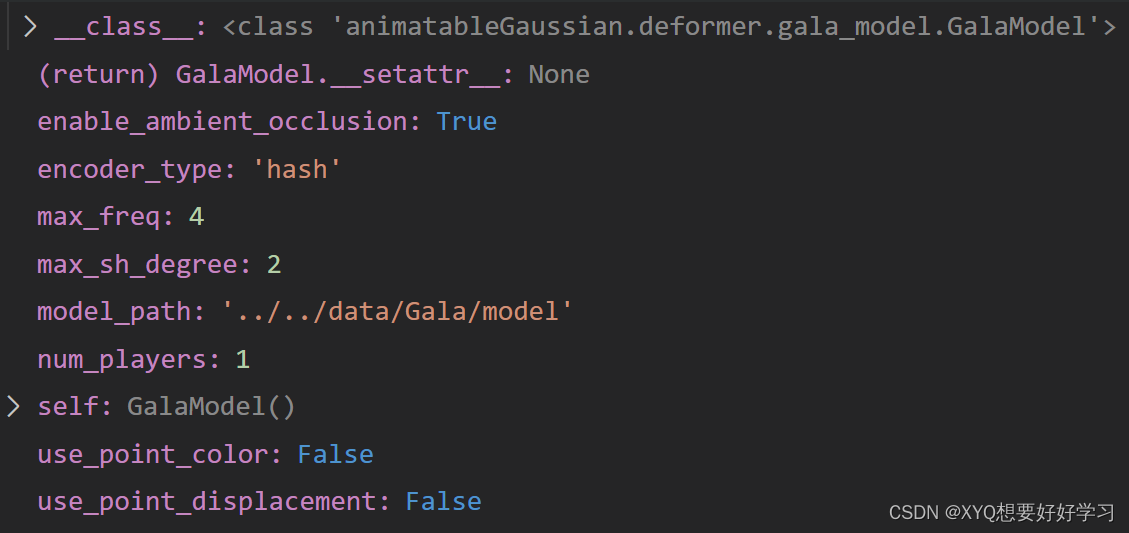
此处,opt.deformer==Gala模型:
Since the public dataset [1] contains few pose and shadow changes, we create a new dataset named GalaBasketball in order to show the
performance of our method under complex motion and dynamic
shadows.
正文开始:
"""
Attributes:
parents (list[J]) : Indicate the parent joint for each joint, -1 for root joint.
bone_count (int) : The count of joints including root joint, i.e. J.
joints (torch.Tensor[J-1, 3]) : The translations of each joint relative to the parent joint, except for root joint.
tpose_w2l_mats (torch.Tensor[J, 3]) : The skeleton to local transform matrixes for each joint.
"""
初始化函数:
"""
Init joints and offset matrixes from files.
Args:
model_path (str) : The path to the folder that holds the vertices, tpose matrix, binding weights and indexes.
num_players (int) : Number of players. # 多人场景
"""
由此模型超参数为:
首先是一些人体基本操作——读取相关数据:
model_file = os.path.join(model_path, "mesh.txt")
vertices, normals, uvs, bone_weights, bone_indices = read_skinned_mesh_data(
model_file)
tpose_file = os.path.join(model_path, "tpose.txt")
tpose_positions, tpose_rotations, tpose_scales = read_bone_joints(
tpose_file)
tpose_mat_file = os.path.join(model_path, "tpose_mat.txt")
tpose_w2l_mats = read_bone_joint_mats(tpose_mat_file)
joint_parent_file = os.path.join(model_path, "jointParent.txt")
self.joint_parent_idx = read_bone_parent_indices(joint_parent_file)
self.bone_count = tpose_positions.shape[0]
self.vertex_count = vertices.shape[0]
print("mesh loaded:")
print("total vertices: " + str(vertices.shape[0]))
print("num of joints: " + str(self.bone_count))
read_skinned_mesh_data(“mesh.txt”)函数读取顶点、蒙皮权重、UV坐标;
read_bone_joints(“tpose.txt”)函数读取关节数据;
read_bone_joint_mats(“tpose_mat.txt”)读取world-to-local转化矩阵;
read_bone_parent_indices(“jointParent.txt”)读取关节父子关系。
多人扩维模板复制:
self.register_buffer('v_template', vertices[None, ...].repeat(
[self.num_players, 1, 1]))
uvs = uvs * 2. - 1.
self.register_buffer('uvs', uvs[None, ...].repeat(
[self.num_players, 1, 1]))
bone_weights = torch.Tensor(
np.load(os.path.join(model_path, "weights.npy")))[None, ...].repeat([self.num_players, 1, 1])
self.register_buffer("bone_weights", bone_weights)
1.register_buffer:定义一组参数,该组参数的特别之处在于:模型训练时不会更新(即调用 optimizer.step() 后该组参数不会变化,只可人为地改变它们的值),但是保存模型时,该组参数又作为模型参数不可或缺的一部分被保存。
2.[None,…]:多一维
# 关节位置申请加入训练
self.J = nn.Parameter(
tpose_positions[None, ...].repeat([self.num_players, 1, 1]))
self.tpose_w2l_mats = tpose_w2l_mats
# 顶点归一化
minmax = [self.v_template[0].min(
dim=0).values * 1.05, self.v_template[0].max(dim=0).values * 1.05]
self.register_buffer('normalized_vertices',
(self.v_template - minmax[0]) / (minmax[1] - minmax[0]))
# distCUDA2 from simple_knn 计算点云中的每个点到与其最近的K个点的平均距离的平方
dist2 = torch.clamp_min(
distCUDA2(vertices.float().cuda()), 0.0000001)[..., None].repeat([1, 3])
然后开始处理要训练的高斯:
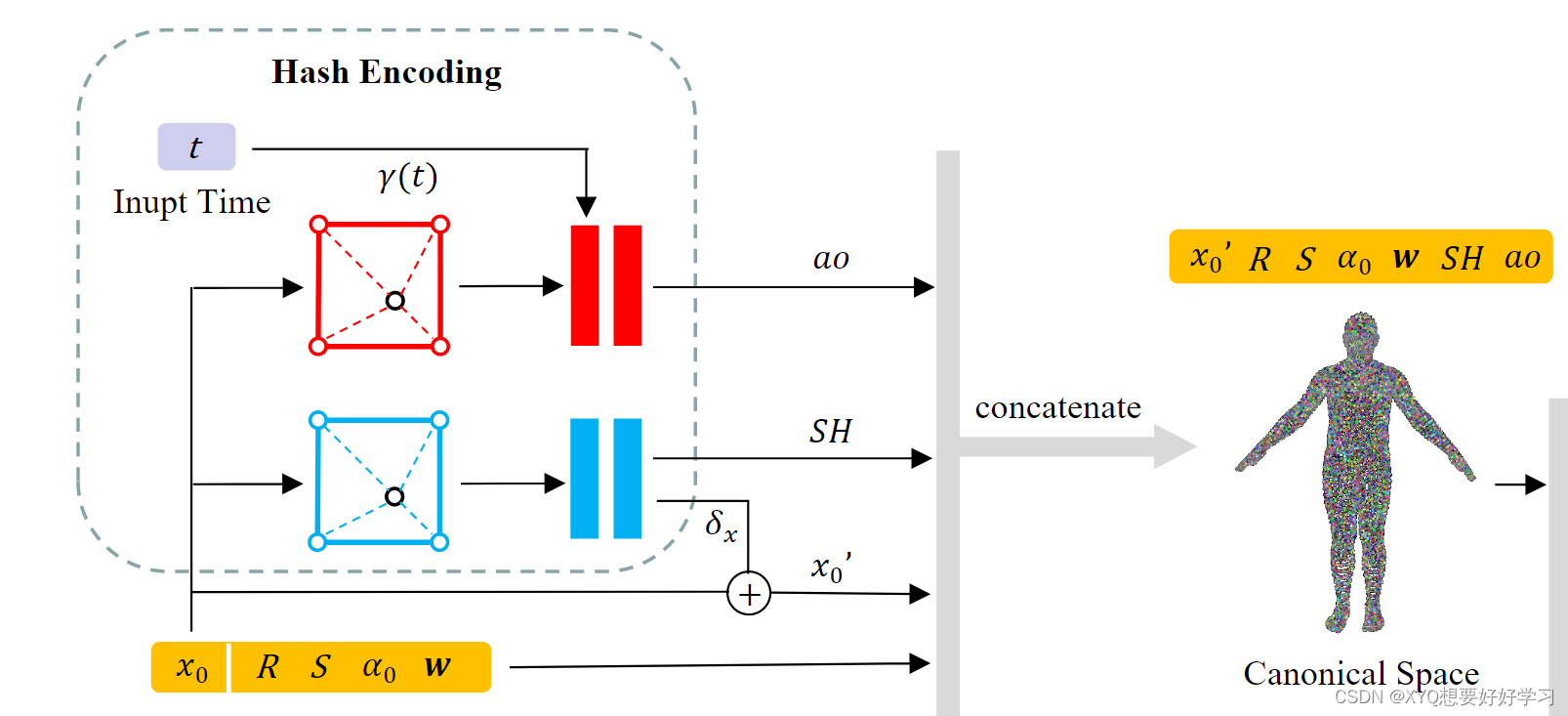
定义顶点偏移:
using unconstrained per-vertex displacement can easily cause the optimization process to diverge in dynamic scenes.Therefore, we also model a parameter field for vertex displacement. F.
# x0 → δx
if use_point_displacement:
self.displacements = nn.Parameter(
torch.zeros_like(self.v_template))
else:
# 使用encoder
self.displacementEncoder = DisplacementEncoder(
encoder=encoder_type, num_players=num_players)
多种编码方式:uv encoder、hash encoder…
Since our animatable 3D Gaussian representation is initialized by a standard human body model, the centers of 3D Gaussians are uniformly distributed near the human surface. We only need to sample at fixed positions near the surface of the human body in the parameter fields. This allows for significant compression of the hash table for the hash encoding [36]. Thus, we choose the hash encoding to model our parameter field to reduce the time and storage consumption.
class DisplacementEncoder(nn.Module):
def __init__(self, encoder="uv", num_players=1):
super().__init__()
self.num_players = num_players
if encoder == "uv":
self.input_channels = 2
self.encoder = UVEncoder(
3, num_players=num_players)
elif encoder == "hash":
self.input_channels = 3
self.encoder = HashEncoder(
3, num_players=num_players)
elif encoder == "triplane":
self.input_channels = 3
self.encoder = TriPlaneEncoder(
3, num_players=num_players)
else:
raise Exception("encoder does not exist!")
这里先选择hash编码,使用tcnn
class HashEncoder(nn.Module):
def __init__(self, num_channels, num_players=1):
super().__init__()
self.networks = []
self.num_players = num_players
for i in range(num_players):
self.networks.append(tcnn.NetworkWithInputEncoding(
n_input_dims=3,
n_output_dims=num_channels,
encoding_config={
"otype": "HashGrid",
"n_levels": 16,
"n_features_per_level": 4,
"log2_hashmap_size": 17,
"base_resolution": 4,
"per_level_scale": 1.5,
},
network_config={
"otype": "FullyFusedMLP",
"activation": "ReLU",
"output_activation": "None",
"n_neurons": 64,
"n_hidden_layers": 2,
}
))
self.networks = nn.ModuleList(self.networks)
定义颜色、透明度、缩放、旋转:
rendering based on 3D Gaussian rasterization can only backpropagate the gradient to a finite number of Gaussians in a single iteration, which leads to a slow or even divergent optimization process for dynamic scenes. To address this issue, we suggest sampling spherical harmonic coefficients SH for each vertex from a continuous parameter field, which is able to affect all neighboring Gaussians in a single optimization.
Optionally, we provide UV-encoded spherical harmonic coefficients, allowing fast processing of custom human models with UV coordinate mappings. UV encoding potentially achieves higher reconstruction quality compared to hash encoding.
n = self.v_template.shape[1] * num_players # 总顶点数
# x0 → SH
if use_point_color:
self.shs_dc = nn.Parameter(torch.zeros(
[n, 1, 3]))
self.shs_rest = nn.Parameter(torch.zeros(
[n, (max_sh_degree + 1) ** 2 - 1, 3]))
else:
# 使用encoder
self.shEncoder = SHEncoder(max_sh_degree=max_sh_degree,
encoder=encoder_type, num_players=num_players)
self.opacity = nn.Parameter(inverse_sigmoid(
0.2 * torch.ones((n, 1), dtype=torch.float)))
self.scales = nn.Parameter(
torch.log(torch.sqrt(dist2)).repeat([num_players, 1]))
rotations = torch.zeros([n, 4])
rotations[:, 0] = 1
self.rotations = nn.Parameter(rotations)
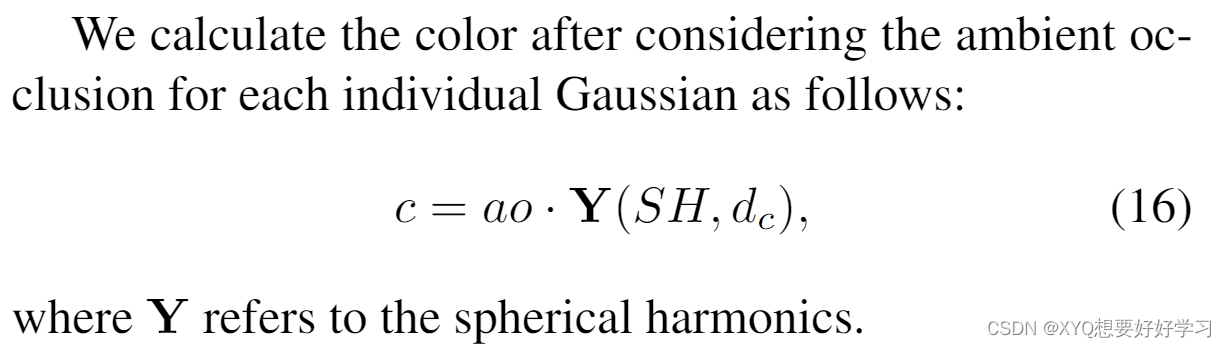
遮挡处理:x0, γ(t) → ao
We propose a time-dependent ambient occlusion module to address the issue of dynamic shadows in specific scenes.
if enable_ambient_occlusion:
self.aoEncoder = AOEncoder(
encoder=encoder_type, max_freq=max_freq, num_players=num_players)
self.register_buffer("aos", torch.ones_like(self.opacity))
we also employ hash encoding for the ambient occlusion ao, since shadows should be continuously modeled in space
class AOEncoder(nn.Module):
def __init__(self, encoder="uv", num_players=1, max_freq=4):
super().__init__()
self.num_players = num_players
self.max_freq = max_freq
if encoder == "uv":
self.input_channels = 2
self.encoder = UVTimeEncoder(
1, num_players=num_players, time_dim=max_freq*2 + 1)
elif encoder == "hash":
self.input_channels = 3
self.encoder = HashTimeEncoder(
1, num_players=num_players, time_dim=max_freq*2 + 1)
else:
raise Exception("encoder does not exist!")
class HashTimeEncoder(nn.Module):
def __init__(self, num_channels, time_dim=9, num_players=1):
super().__init__()
self.networks = []
self.time_nets = []
self.num_players = num_players
for i in range(num_players):
self.networks.append(tcnn.Encoding(
n_input_dims=3,
encoding_config={
"otype": "HashGrid",
"n_levels": 16,
"n_features_per_level": 4,
"log2_hashmap_size": 19,
"base_resolution": 4,
"per_level_scale": 1.5,
},
))
self.time_nets.append(tcnn.Network(
n_input_dims=self.networks[i].n_output_dims + time_dim,
n_output_dims=num_channels,
network_config={
"otype": "FullyFusedMLP",
"activation": "ReLU",
"output_activation": "None",
"n_neurons": 64,
"n_hidden_layers": 2,
}
))
self.networks = nn.ModuleList(self.networks)
self.time_nets = nn.ModuleList(self.time_nets)
至此,高斯球定义完成。

【pytorch】Animatable 3D Gaussian+源码解读(二)将进一步介绍数据集的处理细节。















 981
981











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









