







GRASP,这个算法的名字取得真好。
GRASP在许多组合优化问题中都有应用。
GRASP是一个多起点的迭代过程,每一次迭代由两个阶段组成:一是产生可行解的构造阶段;二是寻找局部最优解的局部搜索阶段。如果局部最优解S比当前搜索到的最优解S*还要优的话,就更新S*。
该算法的基本架构如下:
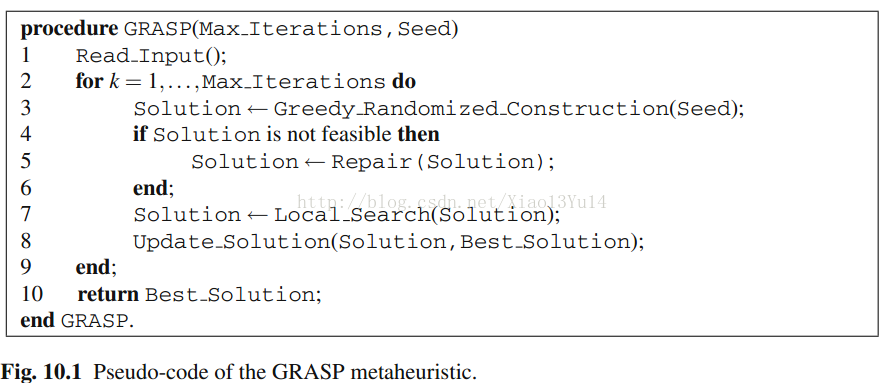
Max_Iterations是迭代次数
迭代之前先贪心随机构造一个解
然后判断可
GRASP,这个算法的名字取得真好。
GRASP在许多组合优化问题中都有应用。
GRASP是一个多起点的迭代过程,每一次迭代由两个阶段组成:一是产生可行解的构造阶段;二是寻找局部最优解的局部搜索阶段。如果局部最优解S比当前搜索到的最优解S*还要优的话,就更新S*。
该算法的基本架构如下:
Max_Iterations是迭代次数
迭代之前先贪心随机构造一个解
然后判断可

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1403
1403





