






前言
modelsim不同版本的区别
ModelSim常见的版本主要有以下几种:
- ModelSim PE (Personal Edition) - 个人版,功能相对少
- ModelSim SE (Standard Edition) - 标准版,功能最全
- ModelSim OEM(Original Equipment Manufacture)-原始设备制造商版本,针对不同厂商推出,多种定制版本,比如针对Intel Xlinx等推出的
这些版本针对不同的用户需求和应用场景进行了定制化开发,并在功能和性能上有所区别。
一、Modelsim 2020.4 SE 下载
我们这里选择功能最全的标准版,方便后续使用
百度网盘下载链接:链接:https://pan.baidu.com/s/12tgWHzDYkcJJ-jB5RXd2xg提取码:u6qb
下载后是这样
二、开始安装
双击exe文件运行安装程序
下一步
选择安装路径(最好全英文)
同意
等待几分钟

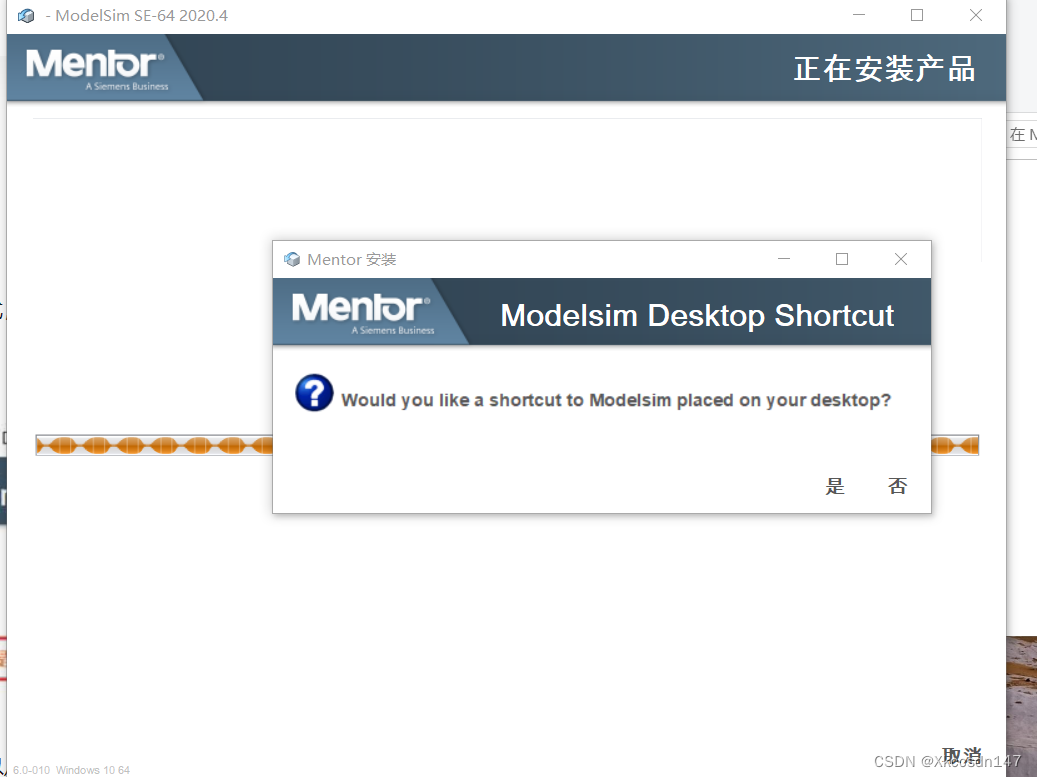
第一次提示-是否安装桌面快捷方式 选择“是”
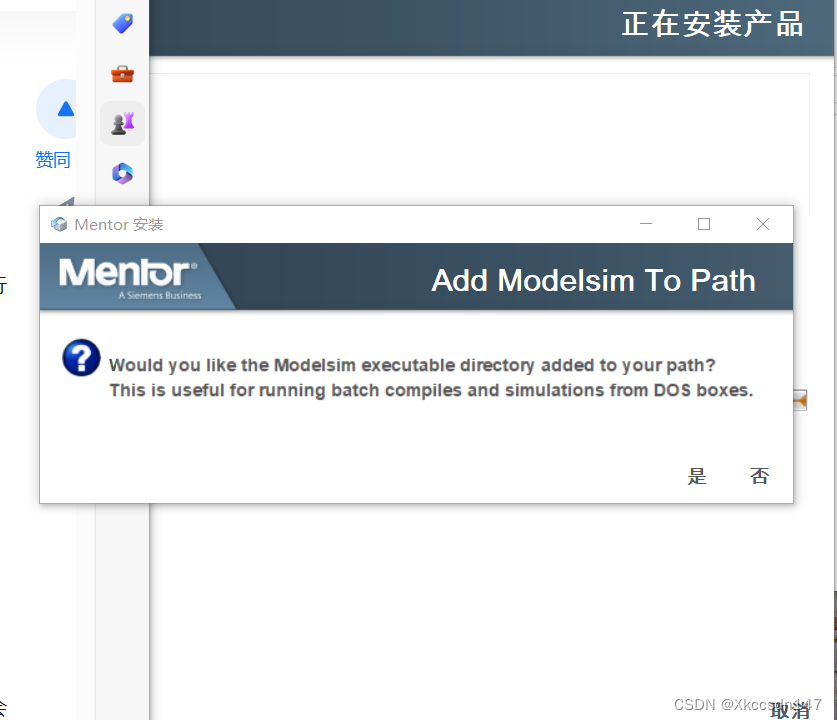
第二次提示是否将 Modelsim 可执行文件放入 Path 变量,选择“是”时可以从 DOS 提示符执行 Modelsim, 这里我们选择“是”
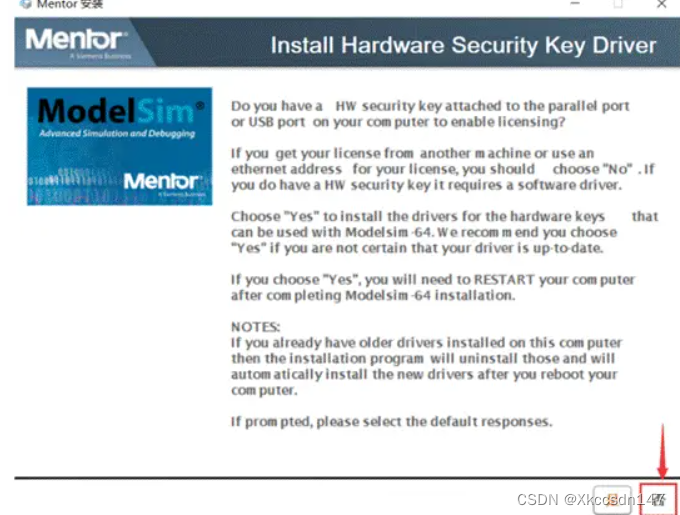
这里我们有license选择否,选是会重启
安装完成
装好后打开桌面的modelsim会弹出没有license
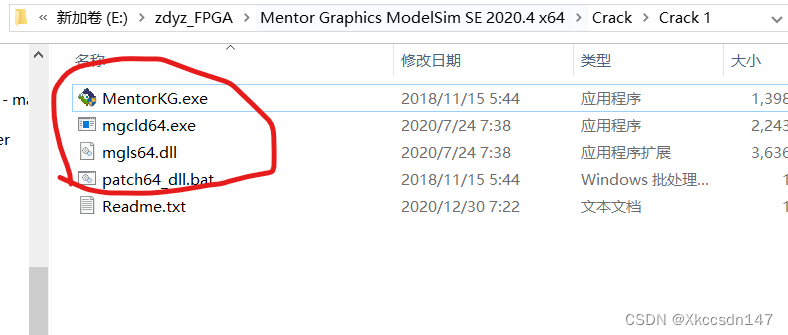
三、破解方法 仅供学习
找到crack1文件夹,复制这四个文件到剪切板
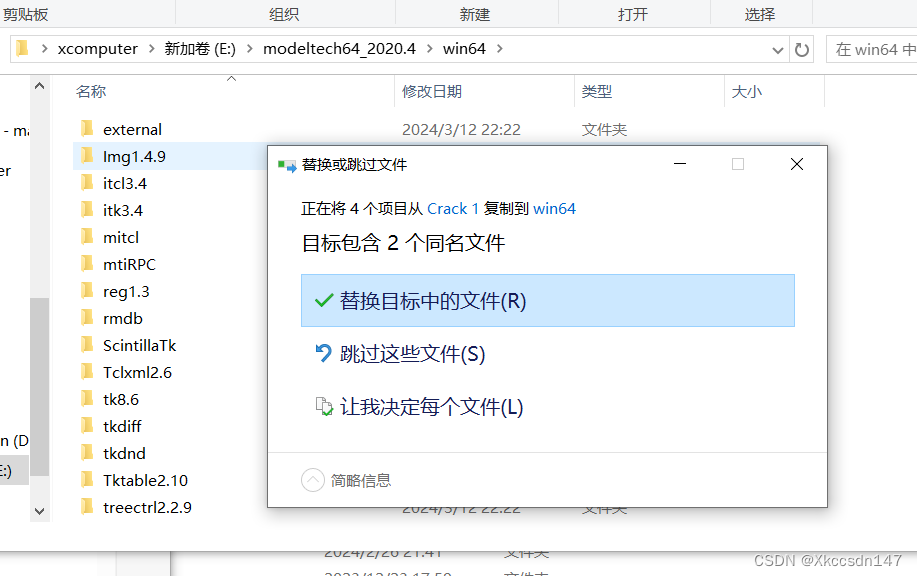
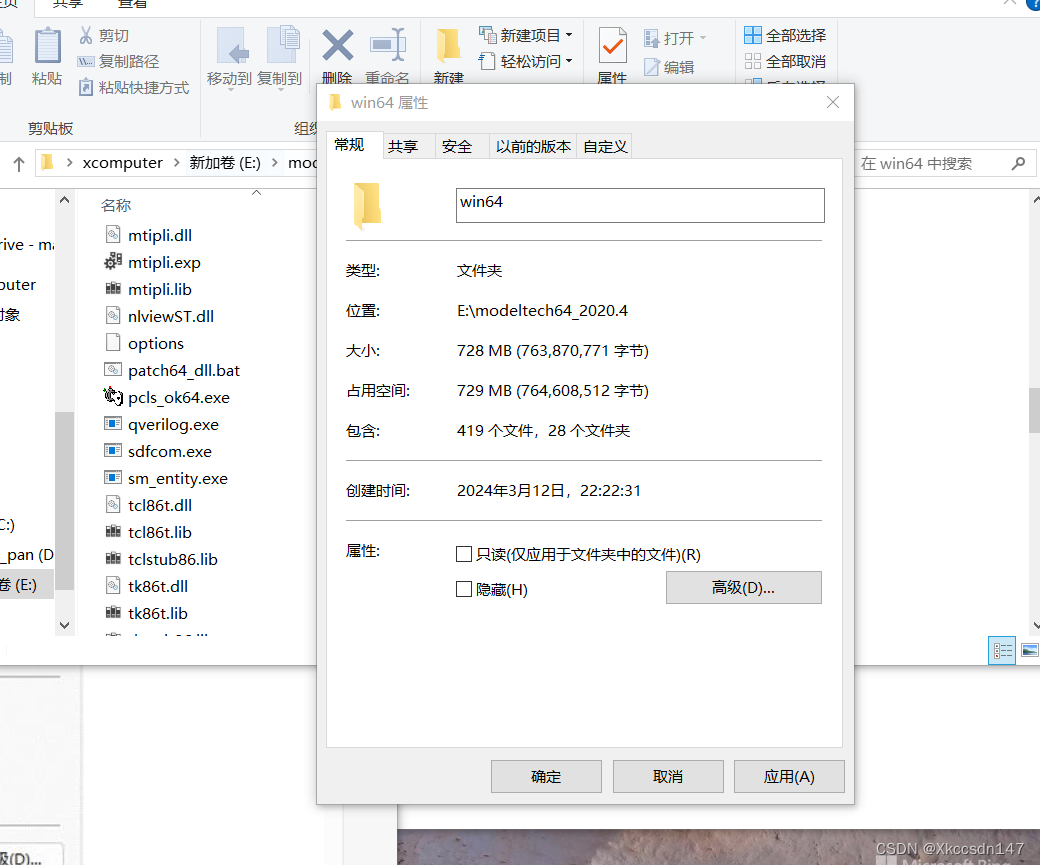
粘贴到win64文件夹中替换文件
找到patch64_dll.bat属性取消勾选只读

找到你网络的物理地址复制
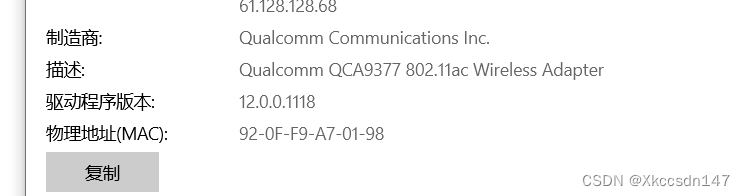
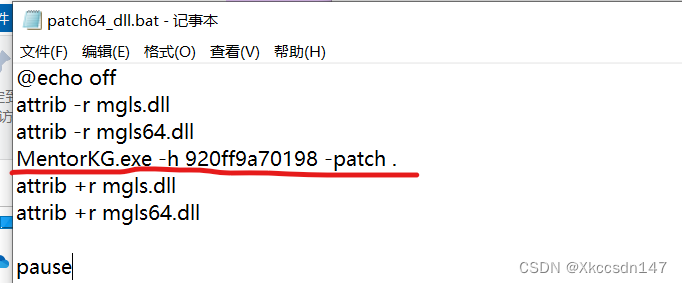
记事本打开patch64_dll.bat,修改第四行,添加物理地址记得去掉短横 “-”
点击确定
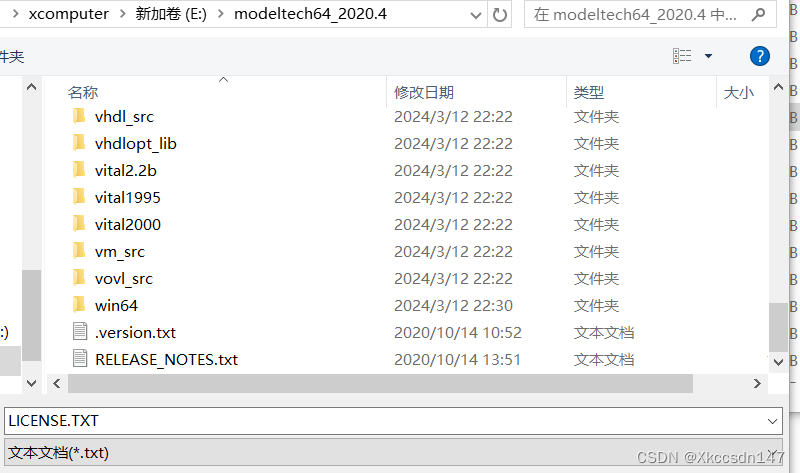
双击patch64_dll.bat后生成LICENSE.TXT
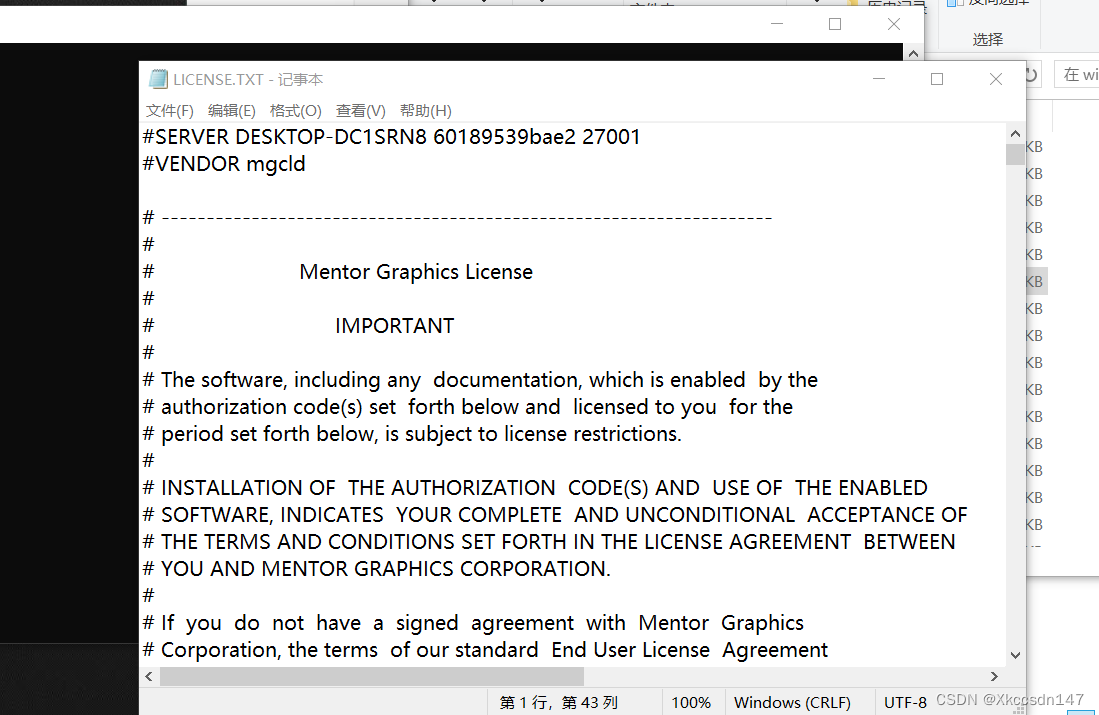
文件另存到modelsim安装路径下
下一步添加环境变量
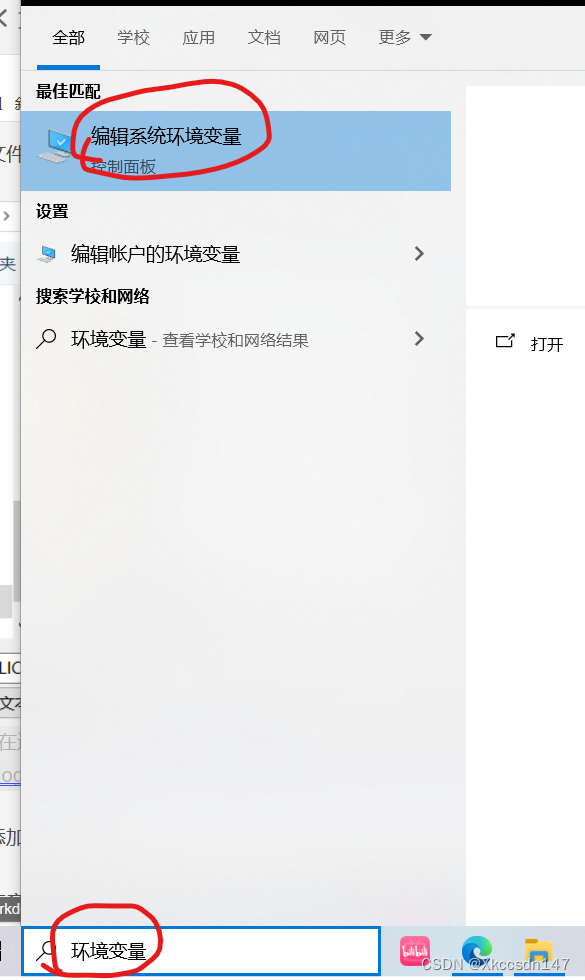
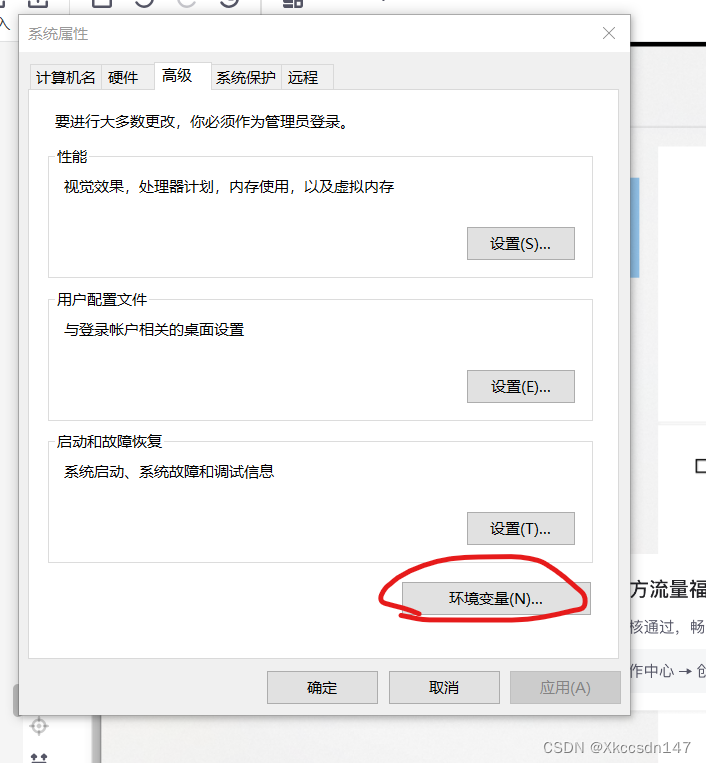
双击Path,添加一条win64文件夹的路径,就在安装目录下
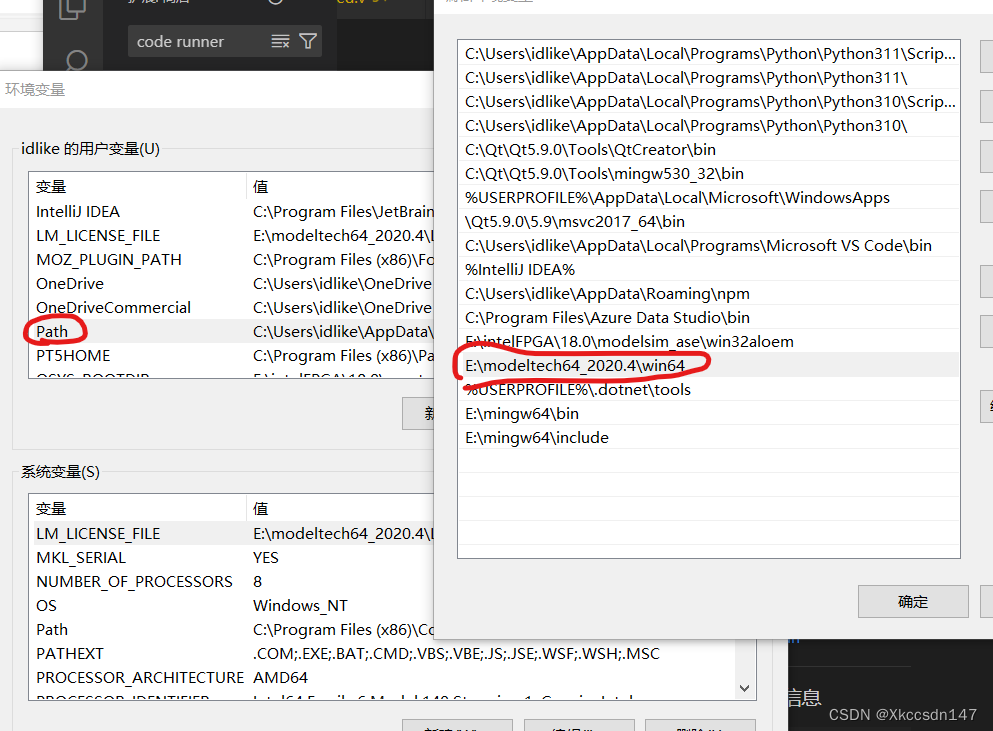
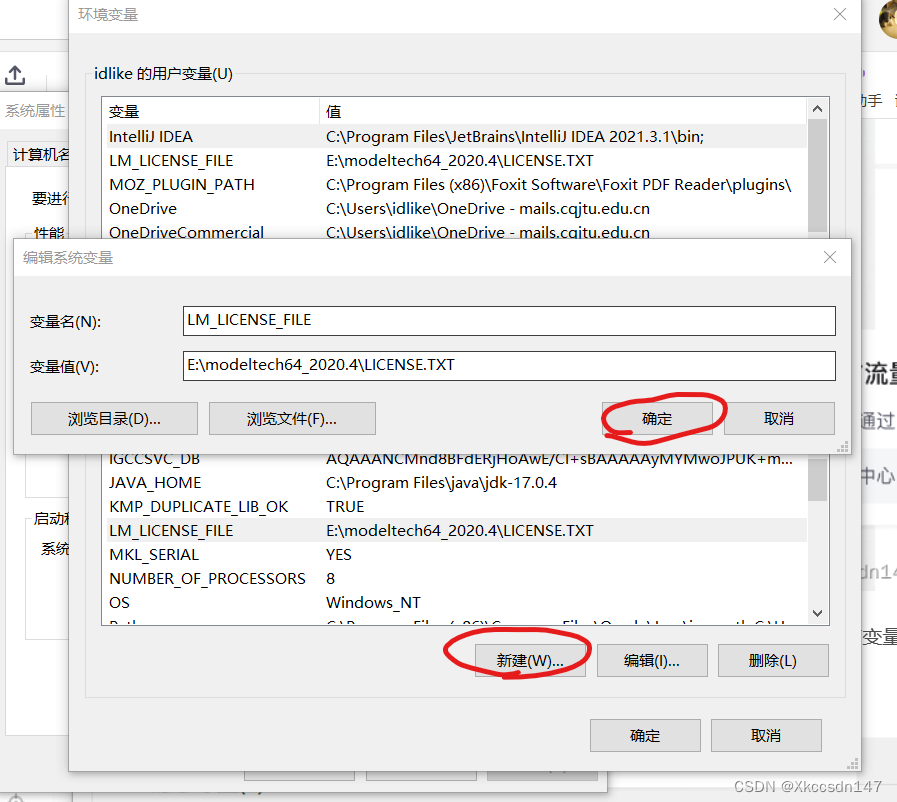
再添加一条环境变量
变量名为MGLS_LICENSE_FILE或者LM_LICENSE_FILE,具体可以直接现在打开modelsim,会有一段红色警告会提醒你,上面有变量名注意看
变量值就是安装路径下的LICENSE.TXT文件
可以愉快的使用了,注意这个是和MAC地址绑定的,如果MAC地址修改了就需要重新生成LICENSE.TXT(正常来说MAC地址是唯一的,如果你开启了随机MAC地址[通常是用于防止被别人锁定],那么MAC地址就会在重新连接WIFI时变化)
参考链接
http://www.jyguagua.com/?p=9715
https://zhuanlan.zhihu.com/p/646172508

















 169
169

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









