






 本文详细介绍了前车碰撞预警系统,涉及深度学习、单目测距、多目标跟踪、车辆检测和智能adas,提供源码和设计文档,探讨了这些技术在车联网中的应用和创新。
本文详细介绍了前车碰撞预警系统,涉及深度学习、单目测距、多目标跟踪、车辆检测和智能adas,提供源码和设计文档,探讨了这些技术在车联网中的应用和创新。
前车碰撞预警——FCW,基于深度学习和单目摄像头测距的前车碰撞预警源码。
单目测距,多目标跟踪。
车辆检测,智能adas,FCW,价格只包括源码及设计文档讲解。
我使用的版本说明:
gpu版本:
anoconda:3-5.1.0
cuda:10.0
cudnn: cudnn-10.0-windows10-x64-v7.6.5.32
tensorflow-gpu: 1.14.0
opencv: 4.2.0
keras:2.2.5
cpu版本:
anoconda:3-5.1.0
tensorflow: 1.14.0
opencv: 4.2.0
keras:2.2.5
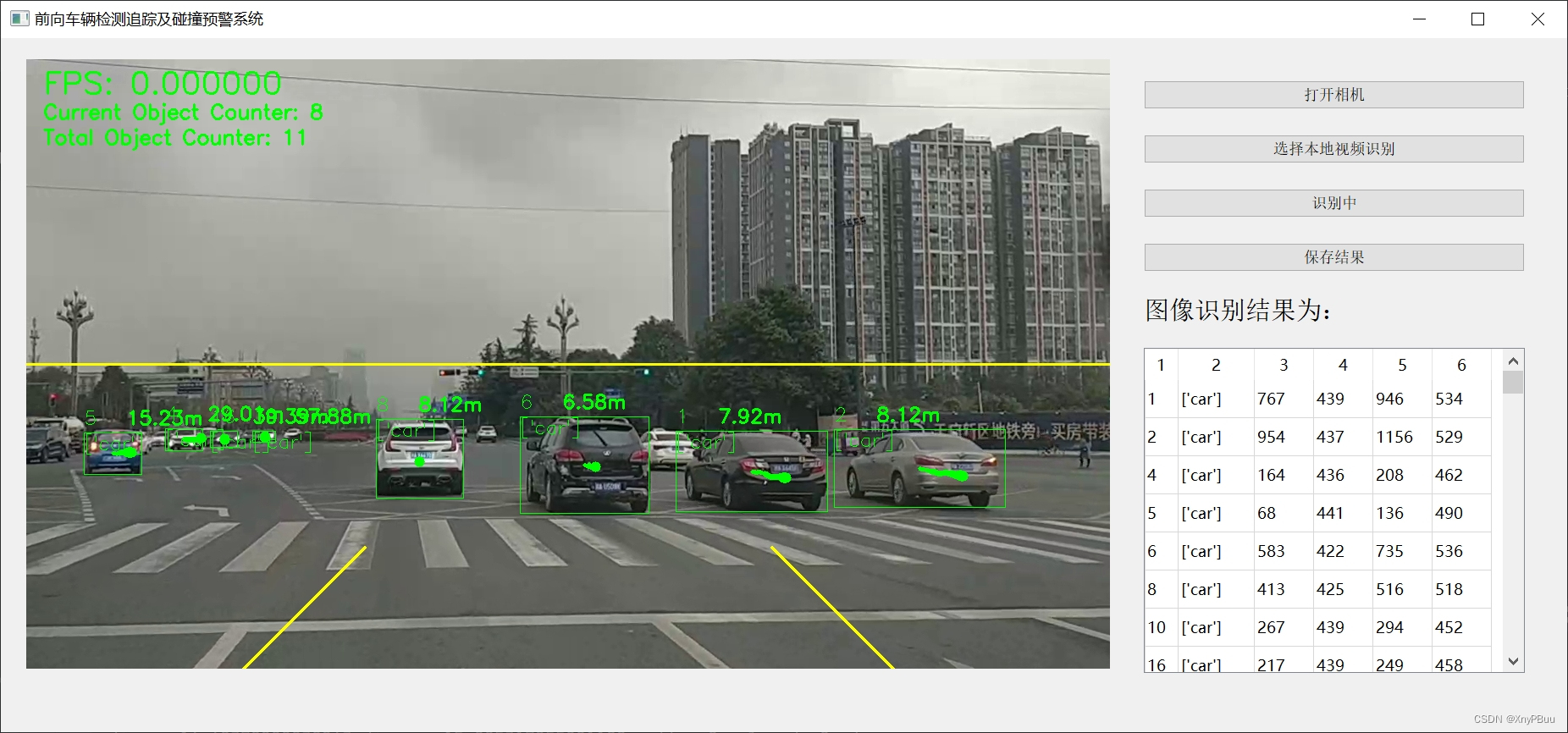
前车碰撞预警的开发一直是车联网领域的热门话题之一。随着深度学习等技术的发展,越来越多的公司开始尝试通过计算机视觉来实现前车碰撞预警系统,而FCW——基于深度学习和单目摄像头测距的前车碰撞预警系统便因此应运而生。本文将围绕该系统,在深度学习、单目测距、多目标跟踪、车辆检测、智能adas等方面进行分析和探讨,并提供源码及设计文档讲解。
一、深度学习在前车碰撞预警中的应用 深度学习技术主要通过神经网络来学习图像特征,进而实现对图像的分类、检测、识别等任务。在前车碰撞预警系统中,通过搭建深度学习模型来对前方道路状况进行识别和分析,进而实现预警功能。具体来说,可以通过卷积神经网络(CNN)来提取图像特征,并将特征输入到分类器中进行判断,从而实现前车碰撞的预警功能。
二、单目测距在前车碰撞预警中的应用 单目测距技术是指通过单个摄像头获取图像,然后利用几何关系进行距离测算的技术。在前车碰撞预警系统中,单目测距可以用来测量前方车辆的距离,进而判断是否存在前车碰撞的风险。具体来说,可以通过立体视觉技术来获取车辆的三维坐标信息,然后通过计算距离等参数来判断前车是否与本车存在碰撞的风险。
三、多目标跟踪在前车碰撞预警中的应用 多目标跟踪技术是指通过在不同时间段内对目标进行跟踪,从而实现目标的连续跟踪和识别的技术。在前车碰撞预警系统中,多目标跟踪可以用来识别前方车辆和行人等障碍物,并对其进行跟踪和分析,从而实现对前方道路情况的实时监控。
四、车辆检测在前车碰撞预警中的应用 车辆检测技术是指通过计算机视觉技术对图像中的车辆进行检测和识别的技术。在前车碰撞预警系统中,通过车辆检测技术可以对前方道路上的车辆进行识别和跟踪,进而实现对前方道路状况的监控和预警。
五、智能adas在前车碰撞预警中的应用 智能adas(Advanced Driver Assistance System)是指基于计算机视觉和机器学习等技术,为驾驶员提供安全驾驶辅助的智能系统。在前车碰撞预警系统中,智能adas可以用来提供实时路况信息,包括前方道路的交通状态、车辆速度等信息,从而帮助驾驶员更好地掌握路况,避免发生前车碰撞等事故。
通过以上对前车碰撞预警系统的深入分析,我们可以看出,这是一个复杂而又创新的系统,涉及到多种技术的应用和综合运用。如果你也对前车碰撞预警等车联网领域的热门话题感兴趣,可以通过本文提供的源码和设计文档进行学习和实践。同时,我们也希望在未来的发展中,更多的技术人员能够加入到这个领域中,一起推动车联网技术的发展和创新。
相关代码,程序地址:http://lanzouw.top/633851744980.html


















 357
357

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









