






matlab代码:计及条件风险价值的电-气综合能源系统能量-备用分布鲁棒优化
关键词:wasserstein距离 CVAR条件风险价值 分布鲁棒优化 电-气综合能源 能量-备用调度
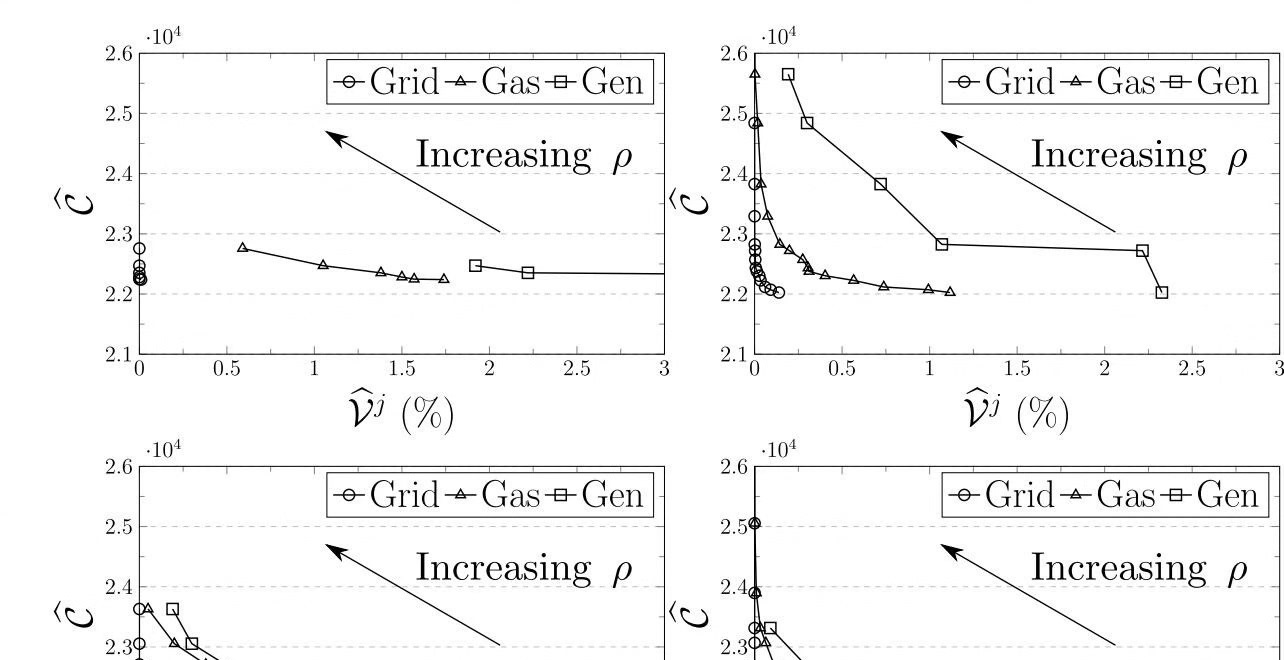
完美复现:《Energy and Reserve Dispatch with Distributionally Robust Joint Chance Constraints》
主要内容:代码主要做的是电气综合能源系统的不确定性调度问题,首先,通过wasserstein距离构建不确定参数的模糊集,其次建立了电-气综合能源系统能量-备用市场联合优化调度模型,并在调度的过程中,考虑调度风险,利用条件风险价值CVaR评估风险价值,从而结合模糊集构建了完整的分布鲁棒模型,通过分布鲁棒模型对不确定性进行处理,显著降低鲁棒优化结果的保守性,更加符合实际
ID:7990775116485684
本校区平凡的豆浆


非线性模型预测控制(NMPC)从原理到代码实践:四个案例详解
一、引言
随着现代控制技术的不断发展,非线性模型预测控制(NMPC)在众多领域得到了广泛应用。本文将从原理出发,结合四个实际案例,详细介绍NMPC的理论知识和实践应用。
二、非线性模型预测控制(NMPC)原理
非线性模型预测控制是一种优化控制策略,适用于处理具有非线性特性的系统。它基于系统的非线性模型,通过优化算法求解一个有限时间窗口内的最优控制问题,从而实现对系统的有效控制。NMPC原理包括以下几个关键步骤:
- 建立系统非线性模型;
- 设定优化目标;
- 求解最优控制序列;
- 实施控制,并实时监测系统的状态。
三、案例实践
- 自动泊车轨迹优化
自动泊车系统是车辆智能化发展的重要方向之一。在自动泊车过程中,轨迹优化至关重要。我们采用NMPC对自动泊车系统进行轨迹优化。首先建立车辆的非线性模型,然后设定优化目标为轨迹平滑、时间短、安全性高等。通过求解最优控制序列,实现对车辆的有效控制,使车辆能够按照优化后的轨迹进行自动泊车。
- 倒立摆上翻控制
倒立摆上翻是一个典型的非线性问题。在控制过程中,需要考虑到摆的动态特性和系统的稳定性。我们采用NMPC对倒立摆上翻进行控制。通过建立倒立摆的非线性模型,设定优化目标为快速上翻、稳定性好等。通过求解最优控制序列,实现对倒立摆的有效控制,使其能够顺利上翻。
- 车辆运动学轨迹跟踪
车辆运动学轨迹跟踪是自动驾驶技术中的一项重要任务。在实际应用中,我们采用NMPC进行车辆运动学轨迹跟踪。通过建立车辆的非线性模型,设定优化目标为跟踪精度高、响应快等。通过求解最优控制序列,使车辆能够准确跟踪预设的轨迹,从而提高自动驾驶的精度和安全性。
- 四旋翼无人机轨迹跟踪
四旋翼无人机具有非线性特性,在飞行过程中需要进行精确控制。我们采用NMPC对四旋翼无人机进行轨迹跟踪控制。通过建立四旋翼无人机的非线性模型,设定优化目标为轨迹准确、稳定性好等。通过求解最优控制序列,实现对四旋翼无人机的有效控制,使其能够准确跟踪预设的轨迹,提高无人机的飞行精度和稳定性。
四、结论
本文通过四个实际案例,详细介绍了非线性模型预测控制(NMPC)的原理和实践应用。这四个案例涵盖了自动泊车轨迹优化、倒立摆上翻控制、车辆运动学轨迹跟踪以及四旋翼无人机轨迹跟踪等领域。通过实际应用,我们验证了NMPC在处理非线性系统控制问题中的有效性和优越性。随着NMPC技术的不断发展,相信其在未来会有更广泛的应用前景。
参考文献:
(根据实际研究或写作需要添加相关参考文献)
注:本文仅提供了大致的框架和思路,具体写作时还需要对每个案例进行详细的描述和分析,并加入更多的技术细节和原理介绍。
相关的代码,程序地址如下:http://matup.cn/775116485684.html
















 113
113

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









