






四轮轮毂电机驱动车辆电机失效下的稳定性容错控制
考虑在电机部分失效的情况下的车辆稳定性控制研究,当电机出现故障时,无法达到期望的转矩、转速,以故障因子来表述电机的故障程度,并对故障因子进行估计。
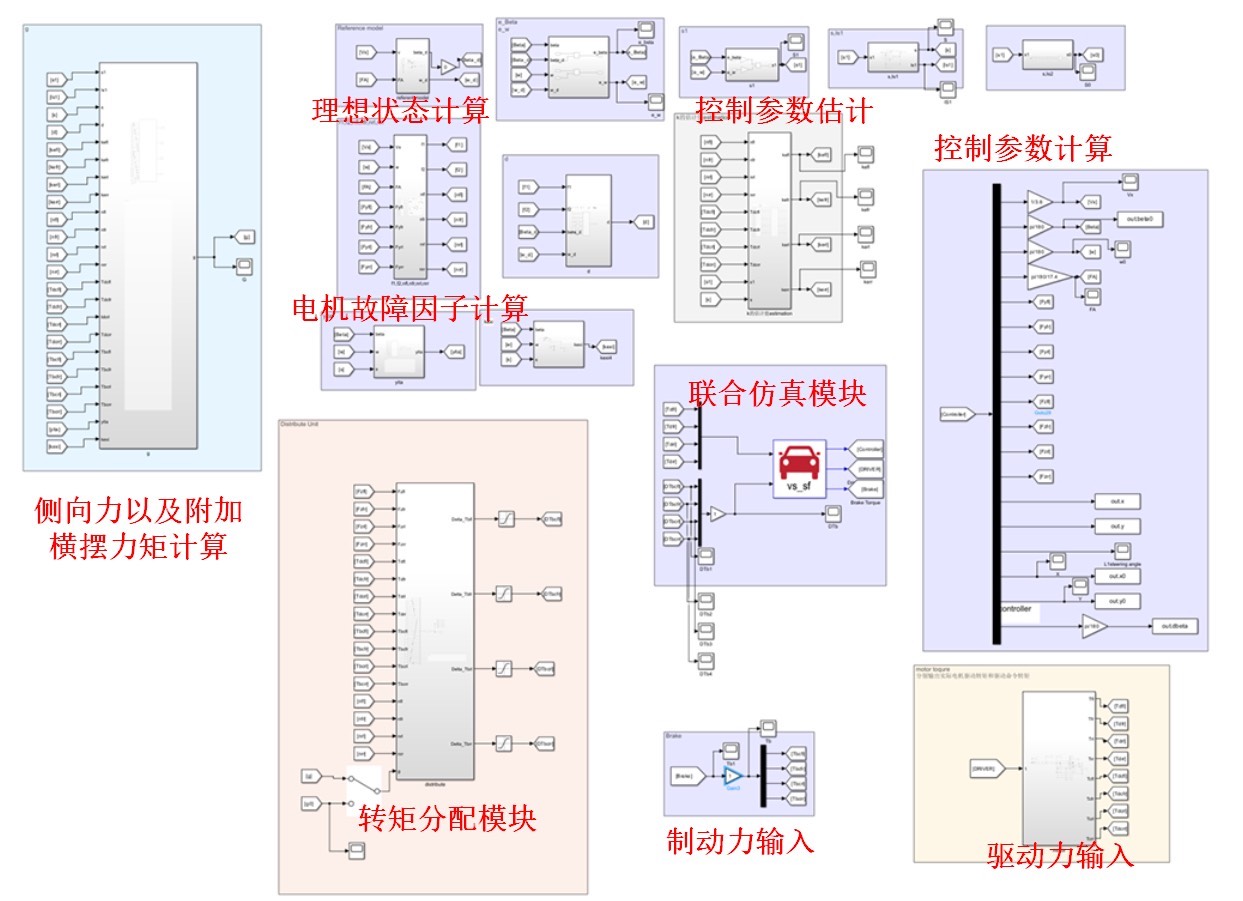
接着采用分层控制架构,其中顶层控制器的任务是利用车辆状态信息、横摆角速度以及质心侧偏角的误差计算出维持车辆稳定性的期望附加横摆力矩。
为了减少车辆速度影响,设计了纵向速度跟踪控制器;底层控制器的任务是对顶层控制器得到的期望附加横摆力矩以及所需制动力进行分配,实现整车在电机部分失效下的稳定性控制。
顶层控制器的控制方法包括:滑模控制(SMC)、LQR控制、PID控制、鲁棒控制(发其中一个,默认发滑模和pid控制器)等。
底层控制器的分配方法包括:平均分配、最优分配(默认发平均分配)。
ID:26299757136578068
爱生气的二狗
四轮轮毂电机驱动车辆的电机故障对车辆的稳定性会产生不良影响。因此,研究如何在电机失效的情况下实现车辆的稳定性容错控制是至关重要的。
首先,我们需要考虑电机故障的情况。当电机发生故障时,它无法提供期望的转矩和转速。为了描述电机故障的程度,我们引入故障因子,并对其进行估计。故障因子可以反映出电机故障的严重程度,从而为后续的故障容错控制提供基础。
为了实现车辆的稳定性容错控制,我们采用了分层的控制架构。在这个控制架构中,顶层控制器的任务是利用车辆状态信息、横摆角速度以及质心侧偏角的误差来计算期望的附加横摆力矩,从而维持车辆的稳定性。顶层控制器可以根据需要选择不同的控制方法,例如滑模控制(SMC)、线性二次调节(LQR)控制、比例积分微分(PID)控制、鲁棒控制等。这些控制方法各具特点,可以根据具体情况选择最适合的控制方法。
为了减少电机失效对车辆速度的影响,我们设计了纵向速度跟踪控制器。该控制器的任务是跟踪期望的纵向速度,并根据需要调整车辆的制动力,实现车辆速度的控制。
底层控制器是顶层控制器的下级,其任务是根据顶层控制器给出的期望附加横摆力矩和所需制动力,进行力矩和制动力的分配,以实现整车在电机部分失效下的稳定性控制。底层控制器可以根据需要选择不同的分配方法,例如平均分配和最优分配。平均分配方法将期望附加横摆力矩和所需制动力均匀分配给四个轮毂电机;最优分配方法则根据具体情况选择最优的分配策略。
在实际应用中,我们可以根据具体情况选择合适的控制方案。在电机部分失效的情况下,稳定性容错控制可以有效地保证车辆的稳定性。通过合理地设计控制器的结构和参数,以及选择适当的控制方法和分配策略,我们可以实现车辆在电机失效下的稳定性控制。
综上所述,通过分层控制架构以及合适的控制方法和分配策略,我们可以实现四轮轮毂电机驱动车辆在电机部分失效的情况下的稳定性容错控制。这不仅可以提高车辆的安全性和稳定性,还可以为电机故障的检测和维修提供有效的指导。未来,我们可以进一步研究和优化这一控制策略,以提高整车的性能和稳定性。
以上相关代码,程序地址:http://fansik.cn/757136578068.html


















 423
423

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









