






四轮转向车辆与前轮转向车辆仿真对比,包含
两种转角工况,对比稳定性,
使用pid,lqr实现四轮转向控制的对比,
纯simulink版本,
有说明文档。
ID:12100722446944346
规控算法工程师

四轮转向车辆与前轮转向车辆仿真对比是一个具有技术性的主题,需要对车辆的转向机制和控制算法进行深入分析和比较。本文将通过使用PID和LQR两种控制算法实现四轮转向控制,并与前轮转向控制进行对比,以探讨不同转向方式的稳定性和性能优劣。
在现代汽车设计中,转向系统的优化至关重要。传统的前轮转向车辆通常采用传统的转向机构,即通过改变前轮的转向角度来实现车辆的转向。然而,随着汽车设计和技术的不断发展,四轮转向车辆逐渐引起了人们的关注。四轮转向车辆可以通过同时改变前轮和后轮的转向角度来实现转向,从而提高车辆的操控性能和稳定性。
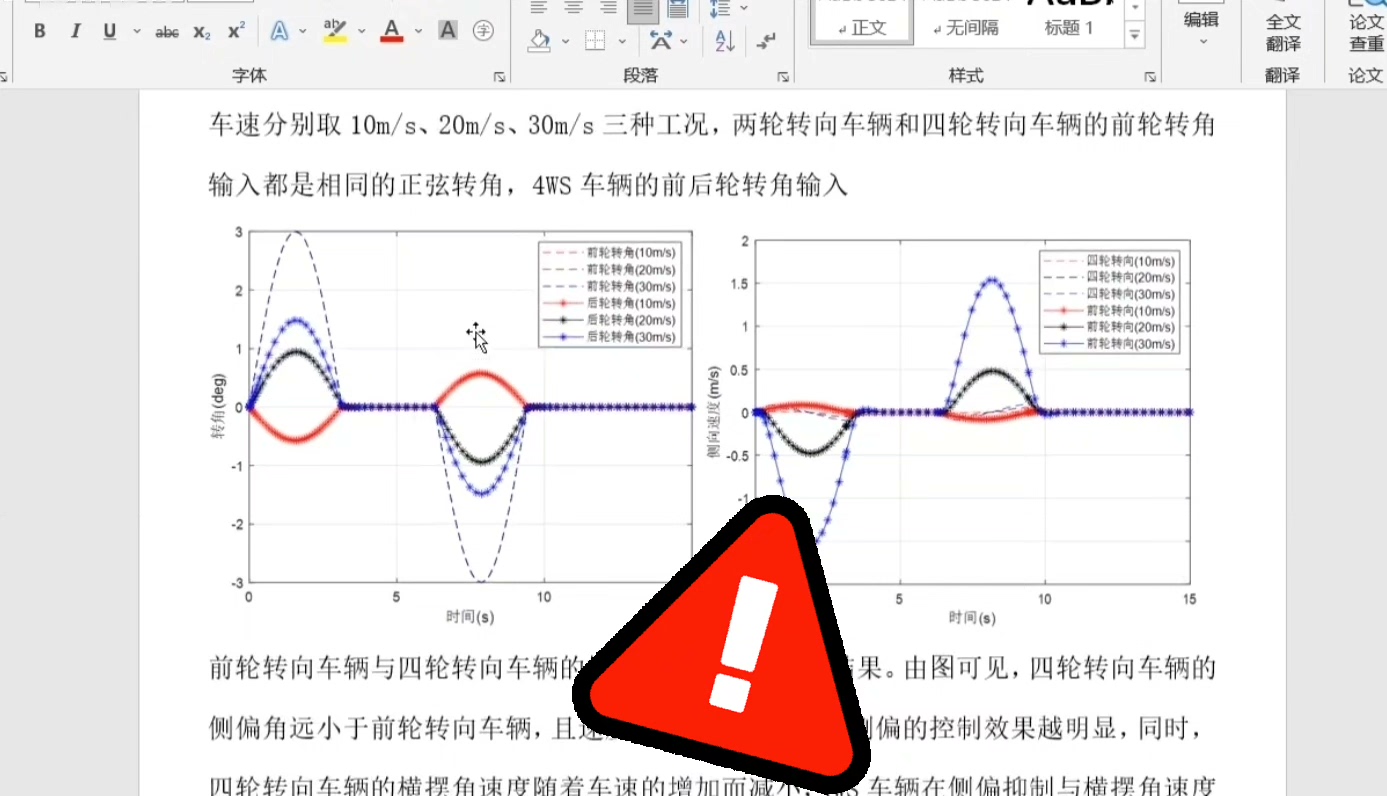
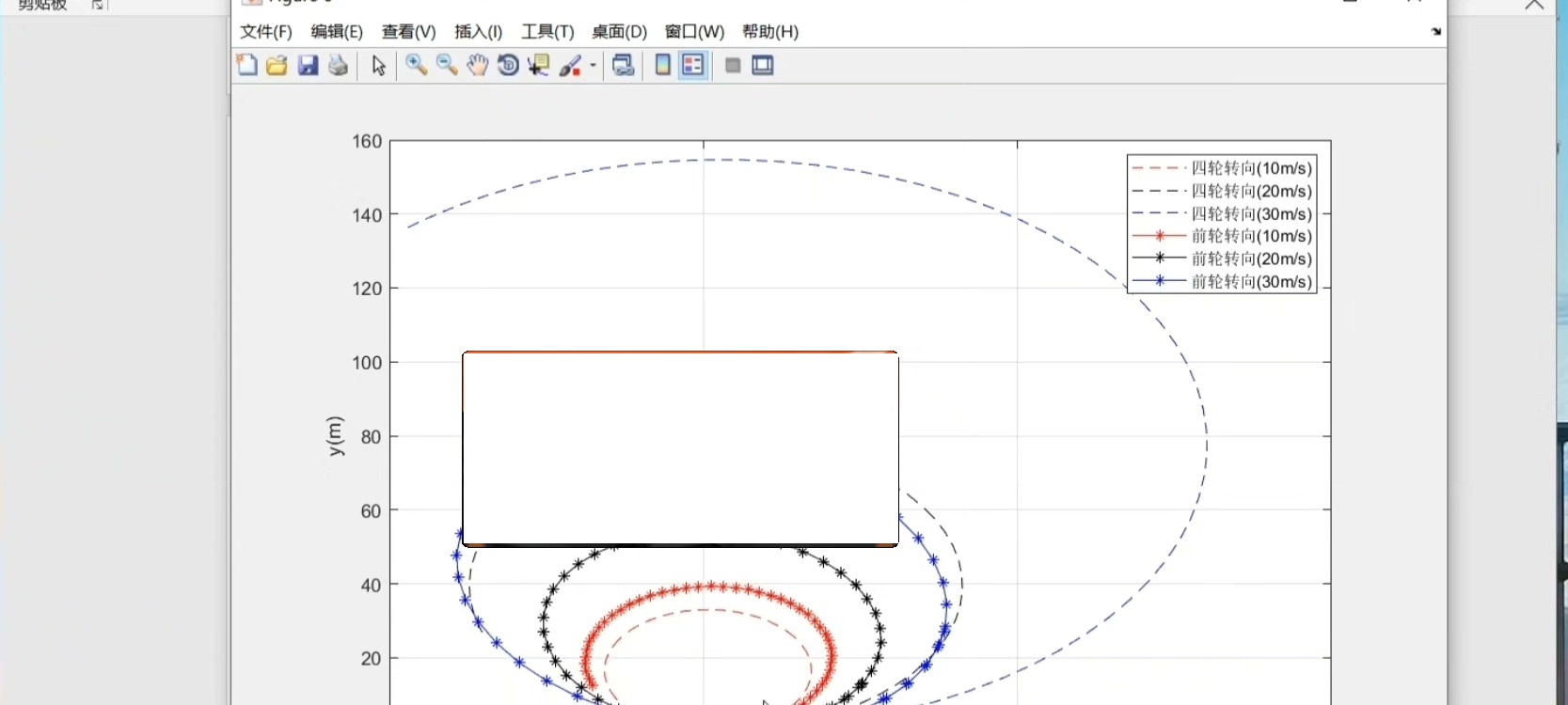
为了对四轮转向车辆和前轮转向车辆进行比较,本文选择了两种转角工况,并对比了它们的稳定性。通过在纯Simulink环境中建立车辆模型,我们可以模拟车辆在不同工况下的转向性能。一种工况是车辆在低速下行驶时,另一种工况是车辆在高速行驶时。通过对这两种工况进行仿真,我们可以评估不同转向方式在不同速度下的稳定性表现。
为了实现四轮转向控制,我们使用了PID和LQR两种经典的控制算法。PID控制算法是一种基于误差反馈的控制方法,通过调节比例、积分和微分三个参数来实现控制系统的稳定性和响应速度。LQR控制算法是一种基于线性二次调节器的控制方法,通过优化控制器的状态反馈增益矩阵来实现最优控制效果。通过比较这两种控制算法在四轮转向控制中的性能,可以评估它们在稳定性和响应速度方面的优劣。
本文的研究结果表明,四轮转向车辆相比于前轮转向车辆在低速行驶时具有更好的稳定性。在低速行驶时,四轮转向车辆能够更精确地控制转向角度,并减小转向误差。而在高速行驶时,前轮转向车辆表现出更好的稳定性,能够更好地抵抗侧倾和失控现象。
在PID和LQR两种控制算法的对比中,结果也反映出它们在不同速度下的性能差异。PID控制算法在低速行驶时表现出较好的性能,能够更快地响应转向指令,并保持较小的偏差。而LQR控制算法在高速行驶时表现出更好的性能,能够更好地抑制车辆的震荡和振动。
综上所述,本文通过对四轮转向车辆和前轮转向车辆的仿真对比,揭示了不同转向方式的稳定性和性能优劣。通过使用PID和LQR两种控制算法实现四轮转向控制,还进一步比较了它们在不同速度下的性能差异。这些研究结果对于汽车设计和转向系统的优化具有一定的指导意义,可以为汽车制造商和工程师提供有益的参考和借鉴。同时,本文的研究方法和分析思路也为进一步探究其他车辆控制问题提供了一定的启示和思路。
【相关代码,程序地址】:http://fansik.cn/722446944346.html
















 296
296











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









