









环境:Rtthread studio 编辑器,stm32f103vet6微控制器,icm206086轴传感器,mpl运动处理库(mpu9250、mpu6050移植类似,此处以icm20608为例)
1、首先新建rtthread 项目

控制台引脚根据自己情况设置,这里设置的是串口3。
编译下载,串口能输出打印信息。
2、使用rtthread i2c驱动框架。
在配置界面选中“软件模拟i2c”、“ulog日志,libc库,posix”。(ulog日志方便输出打印信息,mpl将用到libc库,posix)。


在board.h根据自身情况里配置如下:

我这里使用的I2C2, PE5->SCL PE6->SDA。我的硬件板上I2C1定义了为时钟芯片总线。
3、新建文件夹
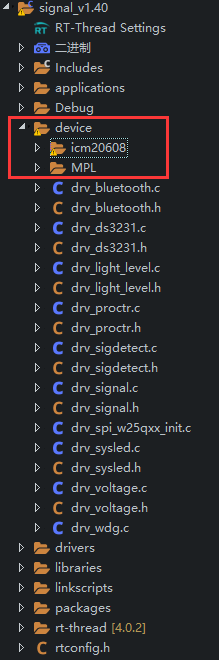
工程中新建文件夹device(用于存放自己编写的驱动文件),device下新建文件夹MPL(用于存放MPL相关的库文件)。device下新建icm20608文件夹(用于存放icm20608芯片配置函数及i2c封装给mpl库的接口函数),具体文件夹及文件位置可更具自己编写习惯新建。(如果编译找不到文件,注意在工程配置中添加文件包含路径)。
4、编写icm20608.h及icm20608.c文件,检查器件IC20608及i2c2总线是否有问题
直接复制原子哥的icm20608.h及icm20608.c,sys.h(sys.h里的数据类型简写定义还是很好用的,为了减少mpl移植麻烦,粗暴保留sys.h到工程内)文件到icm20608文件夹下。并做适当修改。主要修改I2C实现函数,因为此处使用的是rtthread的i2c驱动框架。
修改int ICM20608_Init(void)如下:(做一些打印,方便查看是否配置成功)

修改4个i2c封装函数,用rtthread驱动框架的i2c接口函数实现。




将初始化函数MSH到打印台。
![]()
然后编译下载,检查I2C总线及icm20608器件是否有问题。
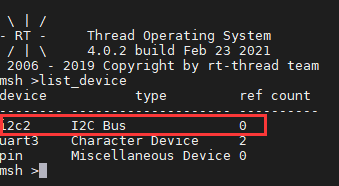 说明i2c2总线注册成功。如果未注册成功,需要检查I2C2的引脚配置及设备查找名称是否定义为“i2c2”。
说明i2c2总线注册成功。如果未注册成功,需要检查I2C2的引脚配置及设备查找名称是否定义为“i2c2”。

运行ICM20608初始化的时候,发现器件ID地址不是0xAF,此处没关系,查阅资料ICM20608的器件根据版本不同,可能是0xAF或者0xAE。我的icm20608器件地址为0xae,程序里相应改为0XAE就可以了。
通过以上配置及测试,基本的I2C总线及器件已经确认没问题了,接下来进行mpl库的移植。
6、移植MPL库文件
直接复制原子哥潘多拉开发板移植好的MPL库文件到device/MPL目录下,并按照原子哥keil例程的包含路径,给rtthread studio 添加MPL库的包含路径。

编译发现很多错误和警告
 先
先
先针对错误进行修改。修改log_stm32.c文件。注释掉#include "usart.h"。

并在drv_icm20608.c中重定义fputc函数

修改inv_icm20608.c文件,注释掉#include "myiic.h" ,#include "icm20608.h",#include "delay.h",新添包含文件如下:

并修改inv_icm20608.c文件中的宏定义如下:

注释掉inv_icm20608.c文件中函数u8 mpu_mpl_init(void)中的IIC_Init();

进行编译,没啥错误。

在drv_icm20608.c中创建线程,初始化mpl库并进行欧拉角的读取。

编译后发现5个error.

原因是找不到
inv_enable_quaternion();
inv_enable_9x_sensor_fusion();
inv_enable_fast_nomot();
inv_enable_gyro_tc();这几个函数,在rtthread studio 全局搜索,也没发现这几个函数。经过查找资料,原来这个函数被封装在libmollib.lib压缩文件里。
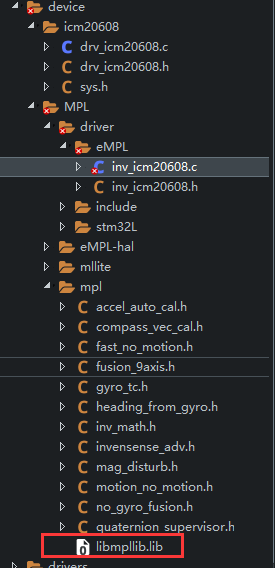
MPL库文件是我们从原子哥例程中直接copy过来的,用的是keil编辑器,stm32l4芯片M4内核,使用的是armcc编译工具链。而我们使用的是rtthread编辑器,gcc编译工具链,stm32f103芯片M3内核。
找到gcc4.9.3目录下的m3内核的压缩文件,将工程中的现有压缩文件替换掉。

并设置rtthread studio 对此压缩文件进行编译。(配置参考连接:https://club.rt-thread.org/ask/question/427453.html)
配置如下:

在keil环境下移植,还需要全局宏定义 ICM20608,EMPL

在rtthread studio下,我们在sys.h里面宏定义ICM20608,EMPL,并在mltypes里包含sys.h头文件。


7、编译下载,输出欧拉角
最后进行编译下载


输出了角速度、加速度、欧拉角。
7、最后上传工程代码,在我的资源里哈哈。
















 2326
2326











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











