






 本文介绍了基于STM32F1单片机的风力摆控制系统,利用PID算法实现多种运动模式,如直线、变线、角度控制等,并通过山外调试助手展示了清晰的波形。详细描述了硬件设计、软件实现和控制效果的验证。
本文介绍了基于STM32F1单片机的风力摆控制系统,利用PID算法实现多种运动模式,如直线、变线、角度控制等,并通过山外调试助手展示了清晰的波形。详细描述了硬件设计、软件实现和控制效果的验证。
风力摆控制系统,stm32f1程序,通过pid控制算法实现了风力摆摆定长直线,变长直线,一定角度摆动,定点停滞,圆形摆动五项功能,控制效果良好,波形可在山外调试助手上显示,代码清晰有注释。

【标题】基于STM32F1的风力摆控制系统研究与实现
【摘要】本文基于STM32F1单片机,通过PID控制算法实现了风力摆摆定长直线、变长直线、一定角度摆动、定点停滞以及圆形摆动五项功能。控制效果良好,同时通过山外调试助手,将波形图形直观地显示出来。本文详细描述了该风力摆控制系统的硬件设计和软件实现过程,对代码进行了清晰的注释。
【引言】 风力摆控制系统在工业自动化领域具有广泛的应用价值。本文以STM32F1为硬件平台,通过PID控制算法实现了多项功能的风力摆控制系统。在实际应用中,风力摆摆动的稳定性和精确性对于工业生产过程至关重要。因此,本文将重点研究风力摆控制系统的设计和实现,为工业自动化领域提供可靠的控制方案。
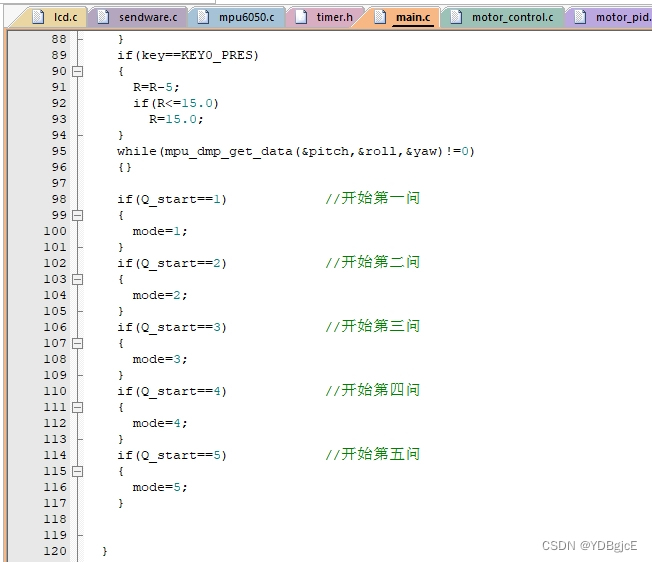
【1. 引言】 风力摆控制系统是一种常见的运动控制系统,具备多种运动模式。本文基于STM32F1单片机,通过PID控制算法实现了风力摆摆定长直线、变长直线、一定角度摆动、定点停滞以及圆形摆动五项功能。本章将对风力摆控制系统的背景和意义进行介绍,并概述本文的结构。
【2. 系统设计】 2.1 硬件设计 本章详细介绍了风力摆控制系统的硬件设计方案。采用STM32F1单片机作为核心控制器,通过相关模块与传感器实现对风力摆的控制和监测。系统设计包括主控制模块、电机驱动模块、传感器模块等部分,本节将对这些模块的功能和设计原理进行详细阐述。
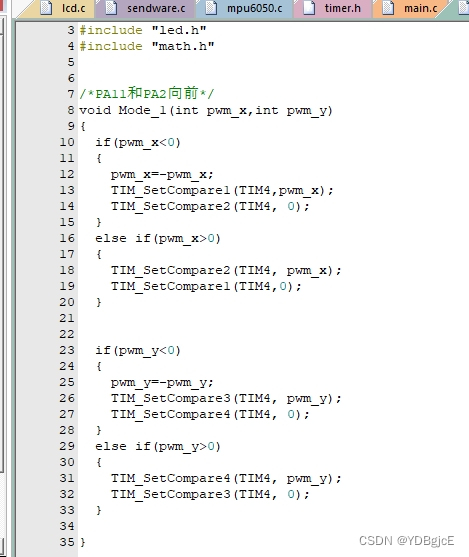
2.2 软件设计 本章详细介绍了风力摆控制系统的软件设计方案。针对风力摆不同的运动模式,采用PID控制算法进行控制。本节将对PID算法原理进行简要介绍,并详述了在STM32F1单片机上的实现过程。此外,本节还会对代码的结构进行说明,并对代码进行详细的注释,以提高代码可读性和代码质量。
【3. 系统实现及结果分析】 本章将详细介绍风力摆控制系统的实现过程,并对实验结果进行分析。通过与实际场景的对比,验证了系统在摆定长直线、变长直线、一定角度摆动、定点停滞以及圆形摆动等五种模式下的控制效果。同时,通过山外调试助手对波形图进行显示,直观地展示系统的工作状态。
【4. 总结与展望】 本章对全文进行总结,并对风力摆控制系统的优化和改进方向进行展望。总结了本文的主要研究内容,指出了系统的创新点和实际应用前景。同时,对未来的研究方向提出了建议,为后续的工作提供参考。
【参考文献】 参考文献列表
【致谢】 对本文进行致谢,感谢指导老师,在研究过程中提供的宝贵指导和帮助。
以上是一个基于STM32F1的风力摆控制系统的论文框架,可以根据需要补充详细的内容,如系统设计、软件设计、系统实现和结果分析等方面的具体细节。同时,注意在论文中尽量使用专业术语和语言,保持结构清晰,使整个论文更具技术性。
相关代码,程序地址:http://lanzouw.top/673023082618.html















 803
803











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









