







 本文介绍了结构屈曲的概念和分类,探讨了失稳与屈曲的关系,重点阐述了在ANSYSWorkbench中如何进行线性和非线性屈曲分析。非线性屈曲分析中,由于牛顿法在某些情况下的局限性,文章提到了非线性稳定性控制和弧长法作为解决后屈曲问题的有效手段。并通过实例展示了这两种方法的应用。
本文介绍了结构屈曲的概念和分类,探讨了失稳与屈曲的关系,重点阐述了在ANSYSWorkbench中如何进行线性和非线性屈曲分析。非线性屈曲分析中,由于牛顿法在某些情况下的局限性,文章提到了非线性稳定性控制和弧长法作为解决后屈曲问题的有效手段。并通过实例展示了这两种方法的应用。
1.前言
本文首先对屈曲分析的一些概念和原理进行介绍,之后描述如何使用ANSYS Workbench进行屈曲分析,对软件使用的算法也会有适当介绍,如在上一篇几何非线性文章中,将载荷分步加载,使用牛顿法和一些收敛准则控制求解,但是针对本文的后屈曲问题,牛顿法并不能很好的得到收敛解,为解决该类问题就要使用别的手段,例如非线性稳定性控制或弧长法等。
2.失稳与屈曲
2.1 失稳
2.1.1失稳的定义
结构系统的破坏分为两种,一类是由材料软化而引起的强度破坏,另一类是由几何软化引起的结构较大变形,从而使结构丧失承载能力。本文所要讨论的问题属于第二类,稳定和屈曲具有不同的概念,但结构失稳的原因都可以归结为几何软化。
在材料力学中是这样定义压杆失稳的:中心受压直杆(理想模型)在直线状态下平衡,由稳定平衡转化为不稳定平衡时所受的轴向压力的界限值,称为临界压力。中心受压直杆在临界压力的作用下,其直线形态的平衡开始丧失稳定性,简称为失稳。显然,这个定义只适用于理想的压杆模型,那么关于失稳是否存在一般性定义呢?在钱若军的《结构屈曲分析理论和方法》中,给出了失稳的静力学定义和一般性定义。
- 基于静力学理论的失稳定义
- 一般的失稳定义
2.1.2 失稳的分类
结构的失稳可以分为五类,第一类是结构系统因几何欠约束发生结构的几何可变;第二类是结构系统因外部约束不充分发生刚体位移或瞬变;第三类是内部几何稳定且外部约束充足的结构系统,在外载荷作用下发生弹性或弹塑性屈曲;第四类是结构系统的倾覆;第五类是结构可能发生的松弛。本文主要研究第三类失稳问题。
2.2 屈曲
2.2.1 屈曲的定义
屈曲是平衡失稳的一个具体模式,发生在整体或局部受压的弹性体上,或者说屈曲是结构的失稳形式。经典屈曲的定义可以归结为结构的平衡转移,当稳定的平衡状态受到任意小的外加干扰后失去平衡,结构因而处于不平衡状态,这种从稳定到不稳定的转移,称为结构发生屈曲。
2.2.2 屈曲的分类
我们来讨论一下欧拉的压杆公式,由欧拉解求得临界力是多值的,它与杆件屈曲的波形有关。令n为失稳弯曲的半波数,则临界力为,当n=1时为最低的临界力,
表示了半波平衡的分枝点。如下图所示,OC为失稳前的平衡路线,CB为失稳后的平衡路线,C点即为分枝点。根据上述性质,可以将屈曲分为分枝型屈曲和极值型屈曲。
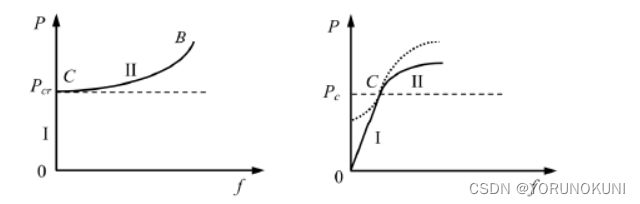
分枝型屈曲:如上图所示,C点为失稳点,在此处发生平衡状态的分歧,结构发生失稳。因此,分枝屈曲的特征是在稳定平衡的基本状态附近存在这另一个相邻的平衡状态,而在分枝点处发生从基本平衡分枝到屈曲平衡分枝的转换。该类屈曲分析实质上是解决平衡方程的多值性问题。
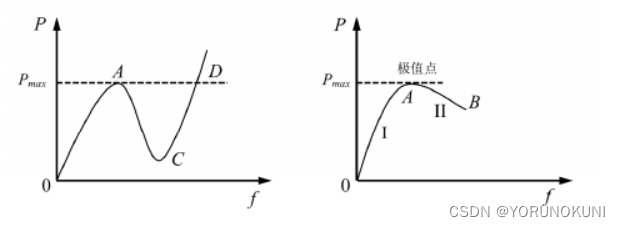
极值型屈曲:如下图所示,极值型屈曲没有明显的分枝点,但在变形途径中存在一个最大载荷值,达到最大载荷值后变形迅速增加,载荷反而下降。极值型屈曲中还存在一类情况,如下图中的左侧图所示,OA和CD段是稳定的,AC段不稳定,当载荷增加到A点时,平衡状态发生明显跳跃,突然过渡到另一具有较大位移的平衡位置,这种情况称为跳跃失稳(snap through)。对应工程中的案例有受横向均布压力的球面扁壳,Williams双杆结构等。
分枝型屈曲和极值型屈曲对应的载荷值称为临界载荷,相应的状态成为临界状态。将到达临界状态之前的平衡状态成为前屈曲平衡状态,超过临界状态之后的平衡状态成为后屈曲平衡状态。
一般概念认为,对于弹性体系其屈曲载荷可以作为体系承载能力的依据。但是,对于有些类型的结构,如四边支撑的受压薄板,在发生屈曲后仍可继续加载,体系的承载能力要比屈曲载荷大很多。而对另外一些结构,如轴向受压的圆柱壳,其实际承载能力又远小于理论指出的屈曲载荷。这些现象说明,根据屈曲分析得到的屈曲载荷并不总是与体系的承载能力相联系的。之所以产生这种原因,关键在于体系后屈曲平衡状态并不总是稳定的,所以对后屈曲的研究也显得至关重要。
3.有限元屈曲分析
ANSYS中的屈曲分析可以分两类:线性屈曲分析(特征值屈曲)和非线性屈曲分析。
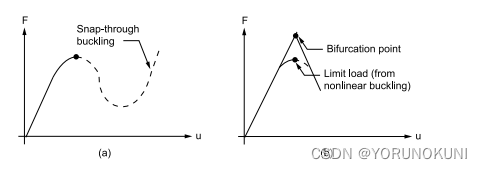
特征值屈曲可以预测一个理性弹性结构的理论屈曲强度,即图(b)中的分叉点。这种分析得到的结果与材料力学中的欧拉公式计算结果相同,但是由于结构的初始缺陷等一系列因素,理论计算结果通常要大于实
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2355
2355

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









